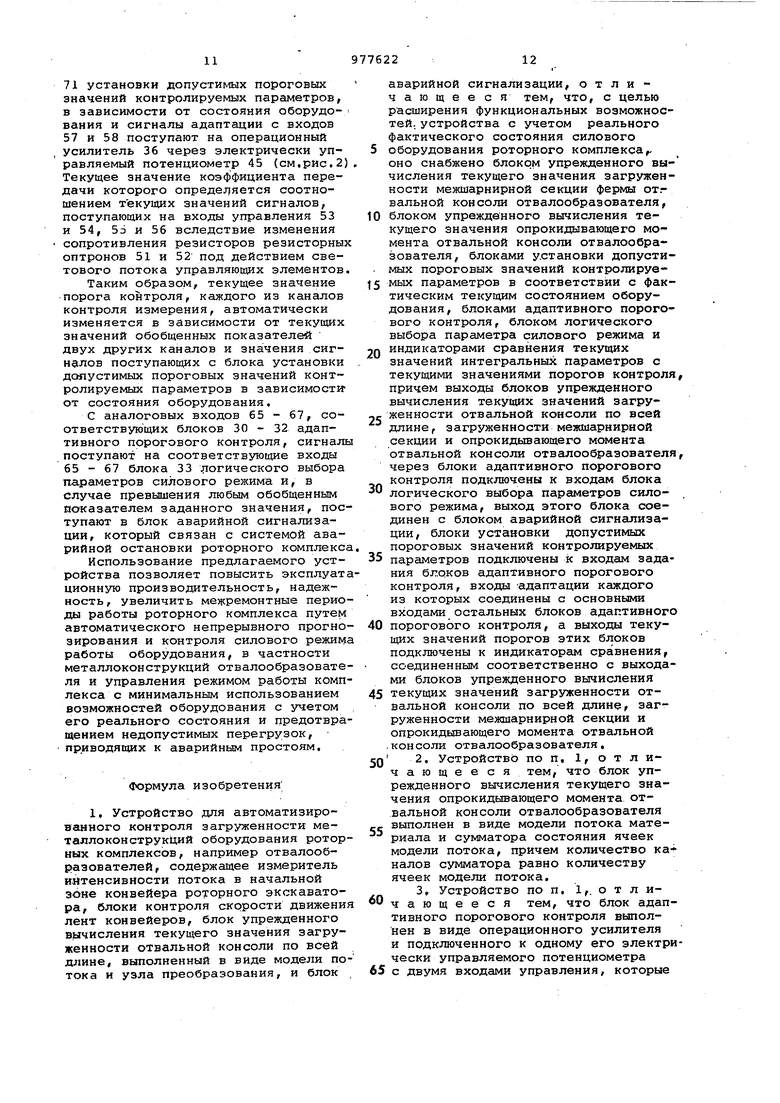
говый элемент, индикатор и блок аварийной сигнализации , Недостаток устройства заключаетс в отсутствии возможности производит многопараметрический пороговый контроль силового режима работы обо рудования, в отсутствии адаптивной :подстройки заданных пороговых значений в зависимости от величины текущих значений силового режима и их соотношения. Цель изобретения расширение функциональных возможностей устройства с учетом реального фактическог состояния силового оборудования роторного- комплекса. Поставленная цель достигается тем, что устройство для.автоматизированного контроля загруженности металлоконструкций оборудования роторных комплексов, например отвалообразователей, содержащее измерите91ь интенсивности потока в начальн зоне конвейера роторного экскаватора, блоки контроля скорости движения лент конвейеров, блок упрежденного вычисления текущего значени загруженности отвальной консоли по всей длине, выполненный в виде модели потока и узла преобразования и блок аварийной сигнализации,снабжено блоком упрежденного вычисления текущего значения загруженности меж шарнирной секции фермы отвальной ко соли отвалообразователя, блоком упрежденного вычисления текущего значения опрокидывающего момента отвальной консоли отвалообразовател блоками установки допустимых порого вых значений контролируемых параметров в соответствии с фактическим текущим состоянием оборудования, блоками адаптивного порогового конт роля, блоками логического выбора параметра силового режима и индикаторами сравнения текущих значений . интегральных параметров с текущими значениями порогов контроля, приче выходы блоков упрежденного вычисления текущих значений загруженности отвальной консоли по всей длине, загруженности межшарнирной секции и опрокидывающего момента отвальной консоли отвалообразователя, через блоки адаптивного порогового контроля подключены к входам блока логического выбора параметров силовог режима, выход этого блока соединен с блоком аварийной сигнализации, блоки установки допустимых пороговых значений контролируемых параметров, подключены к входам задания блоков адаптивного порогового контроля, входы адаптации каждого из которых соединены с основными входа ми остальных блоков адаптивного порогового контроля, а выходы .текущих значений порогов этих блоков подключены к индикаторам сравнения, соединенным cootBeTCTBeHHo с выходами блоков упрежденного вычисления текущих значений загруженности отвальной консоли по всей длине, загруженности межшарнирной секции и опрокидывающего момента отвальной консоли отвалообразователя, При этом блок упрежденного вы- числения текущего значения опрокидывающего момента отвальной консоли отвалообразователя выполнен в виде модели потока материала и сумматора состояния ячеек модели потока, причем количество каналов .сумматораравно количеству ячеек модели потока. Блок адаптивного порогового контроля выполнен в виде операционногоусилителя и подключенного к одному его входу электрически управляемого потенциометра с двумя входами управления, которые являются входами адаптации блока, выходы операционного усилителя и электрически управляемого потенциометра соответственно - основные выходы блока и выходом текущего значения порога, а входы операционного усилителя и электрически управляемого потенциометра также основные выходы блока. Причем электрически управляемый потенциометр с двумя входами управления выполнен в виде последователь-, но включенных резистора и цепи соединенных параллельно резисторных оптронов, управляющие элементы которых являются входами управления электрически управляемого потенциометра , Кроме того, индикатор сравнения текущих .значений интегральных параметров р текущими значениями порогов контроля силового режима выполнен в виде преобразователя электрического сигнала; вдоль шкалы которого размещены источники света, соединенные с входом текущего значения порога контроля через преобразователь аналоговой величины в унитарный позиционный код. На фиг.1 изображена схема устройства; на фиг,2 - схема электрически управляемого потенциометра; на фиг.З - схема индикатора сравнения текущих значений интегральных параметров с текущими значениями порогов контроля. Устройство включает измеритель 1 интенсивности потока, который состоит из датчика 2 погонной нагрузки и преобразователя 3, установленных в начальной зоне конвейера 4, ротор-, ной стрелы 5, роторного экскаватора б . К выходу измерителя 1 интенсивности потока непосредственно подключены блок 7 упрежденного вычисления текущего значения загруженности конвейера 8 отвальной консоли 9 по всей длине, блок 10 упрежденного вычислениятекущего значения загруженности межшарнирной секции 11 отвальной консоли 9 и блок 12 упреждённого вычисления текущего значения опрокидьгаающего момента отвальной консоли 9 отвалообразователя 13.
Блок 7 упрежденного вычисления текущего значения загруженности отвальной консоли по всей длине состоит из модели 14 потока и узла 15 преобразования в аналоговый сигнал. Блок 7 имеет основной вход 16 сдвиговый вход 17 и выход 18. к сдвиговому входу 17 непосредственно подключен блок 19 контроля скорости движения ленты конвейера 8 отвалообразователя 13,
Блок 10 упрежденного вычисления текущего значения загруженности межшарнирной секции 11 отвальной консоли 9 отвалообразователя 13 состоит из модели 20 потока и узла преобразователя 21 в аналоговый сигнал. Блок 9 имеет основной вход 22, сдвиговый вход 23 и выход 24, к сдвиговому входу 23 непосредственно подключен блок 19 контроля скорости движения ленты конвейера 8 отвалообразователя 13. Блок 12 упрежденного вычисления текущего значения опрокидывающего момента отвальной консоли 9 отвалообразователя 13 состоит из модели 25 потока и сумме1тора 26 состояния, причшл количество каналов сумматора 26 выбрано равным количеству ячеек модели 25, а масштабы преобразования отдельных каналов сумматора 26 линейно возрастающие и зависимости от номера канала. Блок 12 имеет основной вход 27, сдвиговый вход 28 и выход 29. К сдвиговому входу 27 непосредственно подключен блок 19 контроля скорости движения ленты конвейера 8 отвалообразователя 13.
Блоки 7, 10 и 12 упрежденного вычисления текущего значения загруженности отвальной консоли 9 по всей длине, загруженности межшарнирной секции 11 и опрокидывающего момента отвальной консоли 9 отвалообразователя 13 через блоки 30 - 32 адаптивного порогового контроля связаны с блоком 33 выбора параметров силового режима, выход 34, которого непосредственно связан с блоком аварийной сигнализации 35.
Бпок 33 реализует логическую функцию , т.е. при появлении сигнала на выходе хотя бы одного из блоков 30-32 адаптивного порогового контрюля, на выходе блока 33 появляется единичный сигнал, вызывающий срабатывание блока 35 аварийной сигнализации. Блок 33 выбора параметров силового режима работы оборудования может быть выполнен в виде контактов реле, в случае установки их в блоках 30 - 32 адаптивного порогового контроля или в виде ключей коммутации, которыми могут служить транзисторы.
Блоки 30 - 32 адаптивного порогового контроля Выполнены в виде операционных усилителей 36 - 38, соединенных с основными входами 39-41
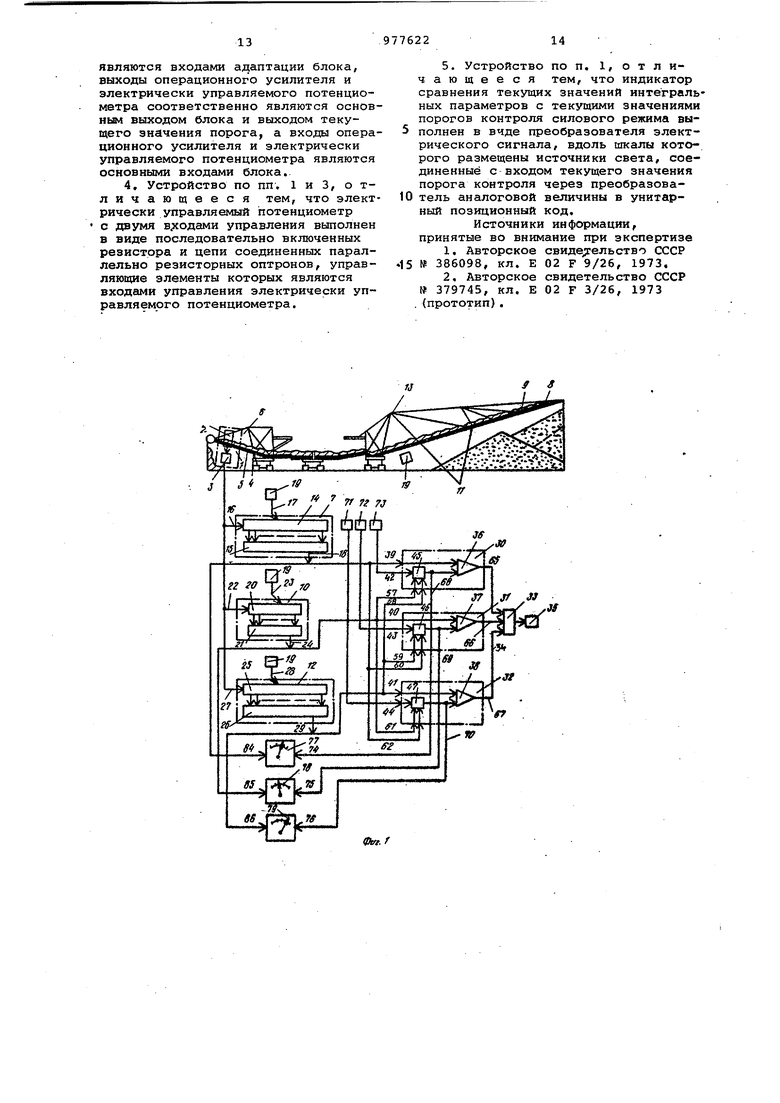
0 непосредственно, а с выходами 42 44 задания порога через электрически управляемые потенциометры 45 - 47 (см.фиг.2), которые выполнены идентично в виде последовательно включенных резистора 48 и цепи соединенных параллельно выходов 49 и 50 резисторных оптроиов 51 и 52, управляющие элементы которых подключены через входы 53-54, 55-56, управления электрически управляемого потенциометра к входам 57-58, 59-60, 61-62 (адаптации блоков 30-32 входа 63-64 являются основньми входами потенциометров. Выходы операционных усилителей 36 - 38 соответственно соеди5нены с основнь ю выходами 65 - 67 блоков 30 - 32 и выходами 68-70 текущего значения порога.
Электрически управляемый потенциометр 45 (46-и 47) выполняет функ0цию делителя напряжения, соответствующего установленной в блоке 73 (71 и 72) величине допустимого порогового значения соответствующего параметра силового режима оборудо5вания, причем благодаря выполнению управляемых сопротивлений указанного делителя в виде резисторных оптронов 51 и 52 и описанному выше выполнению электрически управляемого
0 потенциометра поступающий с выхода блока 73 сигнал допустимого порога автоматически изменяется (корректируется В сторону уменьшения) в зависимости от текущих значений двух других обобщенных показателей сило5вого режима. Скорректированный сигнал допустимого порога поступает на один из входов -операционного усилителя, на второй вход которого поступает сигнал с выхода блока 7
0 (или соответственно 10 и 12); в таком включении операционный усилитель выполняет функцию элемента сравнения (компаратора), т.е. в за висимости от знака рассогласования текущих значений напряжений на входах операционного усилителя практически скачкообразно (при обычно используемых значениях коэффициента усиления усилителя) применяется выходной сигнал операционного, усилителя. .
Таким образом, блок 30 (31 и 32) адаптивного порогового контроля в предлагаемом выполнении обеспечи5вает (в каждом канале) пороговый
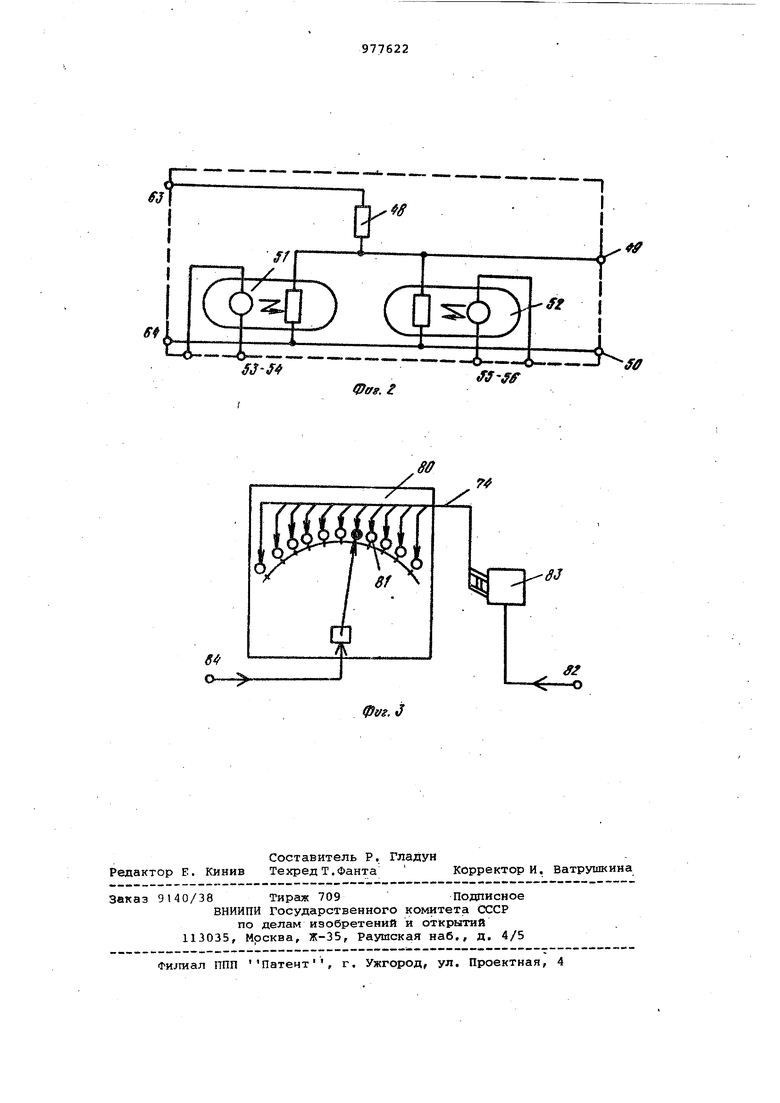
контроль соответствующего параметра силового режима оборудования при автоматическом изменении текущего значения допустимого (заданного) порога контроля в зависимости от текущих значений обобщенных показателей силового режима, вычисляемых в двух других каналах контроля. Каждый из блоков 30-32 адаптивного порогового контроля подключен непосредственно через выходы 42-44 задания порога к соответствующим блокам 71 - 73 установки допустимых порого,вых значений контролируемых параметров в соответствии с фактическим текущим состоянием оборудования7 Через основные входы 39 41 и через входы адаптации 57-58, 59-60, 61-62 блоки 30 - 32 соединены с соответствующими выходами блоков 7, 10 и 12 -упрежденного вычисления текущего значения 3arpsoKeHHpcTH отвальной консоли по всей длине, загруженности межшарнирной секции и опрокидывающему моменту а через выходы 68 - 70 текущего значения порога с входами 74 - 76 индикаторов 77 - 79 сравнения текущих значений интегральных параметров с текущими значениями порогов контроляИндикаторы 77 - 79 сравнения текущих значений интегральных параметров с текущими значениями порогов контроля выполнены в виде преобразователя электрического сигнала, например стрелочного вольтметра f, вдоль шкалы 80 которого дополнительно размещены источники света 81, например электрические лампы или светодиоды, соединенные со входом 82 текущего значения порога контроля через преобразователь 83 аналоговой величины в унитарный код. Каждый из индикаторов 77 - 79 сравнения текущих значений интегральных , параметров с текущими значениями порогов контроля через основной вход 84 - 86 соединен с соответствующими блоками 1, 10 и 12 упрежденного вычисления текущего значения загруженности отвальной консоли по всей длине, загрузкенности межшарнирной секций к опрокидывающему моменту отвальной консоли отвалообразователя.
Вход 74 (75 и 76) текущего значения порогов контроля соединен через преобразователь 83 (фиг.З) аналоговой величины в унитарный код с выходом 68 (69 и 70) текущего значения порога контроля, соответствующего блока 30 (31 и 21) адаптивного порогового контроля.
Сигнал, поступающий от блока 7 (10 и 12) через выход 18 (24 и 29) на основной вход 86 индикатора 77 (78 и 79) сравнения интегральных параметров с текущими порогами, контроля и cooтвeтcтвs oщий упреждённому
вычислению текущего значения загруженности отвальной кйнсоли по всей длине (загруженности межшарнирной секции и опрокидывающего момента отвальной консоли отвалообразователя) индицируются стрелкой соответствующего индикатора, а сигнал поступающий от блока 30 (31 и 32) адаптивного порогового контроля через выход. 68 (69 и 70) текущего значения порога на вход 74 (75 и 76) текущего значения порога, индикатора 77 (78 и 79) сравнения интегральных параметров с текущими порогами контроля, через преобразователь аналоговой
5 величины в унитарный код, индицируется на электрических лампочках или светодиодах расположенных вдоль шкалы индикатора.
Устройство работает следующим
0 образом.
При работе роторного экскаватора 6 с измерителя 1 интенсивности потока, сигнал - выходное напряжение датчика 2, благодаря действию частотноc го преобразователя 3, представлено в частотно-импульсной форме, соответствующей текущему значению производительности комплекса, т.е, прохождению вскрышного грунта на конвейере 4 через зону установки (отрезок потока) датчика 2 погонной нагрузки поступает на основные входы :блоков 7, 10 и 12 упрежденного вычисления текущего значения загруженности отвалообразователя по всей
5 Длине отвальной консоли, загруженности межшарнирной секции и опрокидывающего момента отвальной консоли отвалообразователя.
Сигнал , поступающий в модель 14
0 блока 7 упрежденного вычисления текущего значения загруженности отвальной консоли 10 по всей длине, каждый импульс последовательности импульсов, частота которых отражает
5 текущую производительность, записывается в первой ячейке модели 14 и переносится в последующие ячейки модели со скоростью, пропорциональной частоте продвигающихся импульсов,
0 поступающих от блока 19 контроля скорости движения ленты конвейера 8, Таким образом, скорорть продвижения импульсов в модели 14 пропорциональна скорости, с которой будет
5 перемещаться отрезок потока вскрышного грунта когда он достигнет конвейера отвальной консоли отвалообразователя. Число импульсов, находящихся в данный момент в ячейках мод дели 12, соответствует весовому количеству вскрышного грунта, которое загружает металлоконструкции консоли 10 отвалообразователя 11 после достижения контролируемого участка стрелы 10 указанным отрезком потока
вскрышного грунта, перемещаемого конвейерами комплекса. Число импульсов находящихся в данный момент в модели 14, с помощью узла 15 преобразуется в аналоговый сигнал, поступащий на основной вход 84 индикатора 77 сравнения текущих значений интегральных параметров с текущими значениями порогов контроля, на основной вход 39 блока 30 адаптивного порогового контроля и на входы 59 ,62 адаптации соответствующих блоков 31 и 32 адаптивного порогового контроля.
Поступая в модель 20 блока 10 упрежденного вычисления текущего значения загруженности межшарнирной секции 11 фермы отвальной консоли
10отвалообразователя 13, сигнал кгикдый импульс последовательности импульсов, частота которых отражает текущую производительность, записывается в первой ячейке модели 20 и переносится в последующие ячейки модели со скоростью, пропорциональной частоте продвигающихся импульсов, поступающих от блока 19 контроля скорости движения ленты конвейера 8
Таким образом, скорость продвижения импульсов в модели 20 пропорциональна скорости, с кбторой перемещается отрезок потока вскрышного грунта, когда он достигает межшар нирной секции 11 конвейера отвалообразователя, а число импульсов, находящихся в данный момент в ячейках модели 20, соответствует весово количеству вскрышного грунта, которое загружает межшарнирную секцию
11фермы отвальной консоли отвалообразователя 13 после достижения контролируемого участка, консоли указанным отрезком потока вскрышного грунта, перемещаемого конвейерами комплекса. Число импульсов, находящихся в данный момент в модели 20,
с помощью узла 21 преобразуется в аналоговый сигнал, поступающий на основной вход 85 индикатора 78 сравнения текущих значений интегральных параметров с текущими значениями порогов контроля, на основной вход 40 блока 31 адаптивного порогового контроля и на входы 57 и 58, 61 и 62 адаптации соответствующих блоков 30 и 32 адаптивного порогового контроля .
Поступая в модель 25 блока 12 упрежденного вычисления опрокидывающего момента отвальной консоли отвалообразователя 13, сигнал, кеикдый импульс последовательности импульсов, записывается в первой ячейке модели 25 и переносится в последующие ячейку модели со скоростью, пропорциональной частоте продвигающихся импульсов, поступающих от блока 19 контроля скорости движения ленты конвейера 8.
Таким образом, скорость продвижения импульсов в модели 25 потока пропорциональна скорости, с которой перемещается отрезок потока вскрышного грунта, когда он достигнет конвейера 8 отвальной консоли 9, а число импульсов,находящихся в данный момент в ячейках модели 25 потока, соответствует весовому количеству вскрышного грунта, которое загружает
O конвейер отвальной консоли на всей длине. Каждый из импульсов, находящихся в этот момент в модели 25 потока, с помощью узла 26 преобразования (сумматора) формируется в масштабах преобразования отдельных ка5налов сумматора 26, линейно возрастающих в зависимости от номера канала, в аналоговую форму, причем количество каналов сумматора 26 равно количеству ячеек модели 25 потока.
0 Сигнал в аналоговой форме поступает на выход 29, откуда в аналоговой форме поступает на основной вход 86 индикатора 79 сравнения текущих значений интегральных параметров с
5 текущими значениями порогов контроля. На основной вход 41 блока 32 адаптивного порогового контроля, на входы 57 и 58, 61 и 62 адаптации соответствующих блоков 30 - 32
0 адаптивного порогового контроля, на входы 42-44 задания текущего значения порога контроля которых поступают сигналы в аналоговой форме с соответствующих блоков 71 - 73 уста5новки допустимых пороговых значений.
Блоки 30 - 32 адаптивного порогового контроля работают идентично и предназначены для учета взаимодействия сигналов, поступающих на входы
0 39 - 41 основные, на входы 57 и 58, 59 и 60, 61 и 62 адаптации и на вхо ды 42 - 44 задания текущего значения порога контроля.
В связи с тем, что блоки 30 - 32
5 :адаптивного порогового контроля работают идентично, рассмотрим работу одного из блоков.
В блоке 30 адаптивного порогового контроля сигнал, поступающий с блока 7 упрежденного вычисления теку0щего значения загруженной отвальной консоли по всей длине, формируется в операционном усилителе 36 с учетом взаимовлияния сигналов, поступающих на вход 42 задания текущего значения
5 порога контроля с блока 71 установки -допустимых пороговых значений контролируемых параметров, в зависимости от состояния оборудования и сигналов, поступающих на входы 56 и 58 адапта0ции с соответствующих входов 24 и 29 блоков 10 и 12 упрежденного вычисления текущего значения загруженности межшарнирной секции и опрокидывающего момента отвальной консоли
5 от.валообразователя. Сигналы с блока ,
71 установки дoпycти 1ыx пороговых значений контролируемых параметров, в зависимости от состояния оборудования и сигналы адаптации с входов 57 и 58 поступают на операционный усилитель 36 через электрически управляемый потенциометр 45 (см,рис.2} Текущее значение коэффициента передачи которого опредед яется соотношением текущих значений сигналов, поступающих на входы управления 53 и 54, 5о и 56 вследствие изменения сопротивления резисторов резисторных оптронов 51 и 52 под действием светового потока управляющих элементов.
Таким образом, текущее значение порога контроля, каждого из каналов контроля измерения, автоматически изменяется в зависимости от текущих значений обобщенных показателей двух других каналов и значения сигналов поступаюгдах с блока установки допустимых пороговых значений контролируемых параметров в зависимостиот состояния оборудования,
С аналоговых входов 65 - 67, соответствующих блоков 30 - 32 адаптивного порогового контроля, сигналы поступают на соответств5тощие входы 65 - 67 блока 33 логического выбора параметров силового режима и, в случае превышения любым обобщенным показателем заданного значения, поступают в блок аварийной сигнализации, который связан с системой аварийной остановки роторного комплекса
Использование предлагаемого устройства позволяет повысить эксплуатационную производительность, надежность, увеличить межремонтные периоды работы роторного комплекса путем автоматического непрерывного прогнозирования и контроля силового режима работы оборудования, в частности металлоконструкций отвалообразователя и управления режимом работы комплекса с минимальным использованием возможностей оборудования с учетом его реального состояния и предотвращением недопустимых перегрузок, приводящих к аварийным простоям.
Формула изобретения;
1, Устройство для автоматизированного контроля загруженности металлоконструкций оборудования роторных комплексов, например отвалообразователей, содержащее измеритель имтенсивности потока в начальной конвейера роторного экскаватора, блоки контроля скорости движения лент конвейеров, блок упрежденного вычисления текущего значения загруженности отвальной консоли по всей длине, выполненный в виде модели потока и узла преобразования, и блок ,
аварийной сигнализации, отличающееся тем, что, с целью расширения функциональных возможностей., устройства с учетом реального фактического состояния силового оборудования роторного комплекса,оно снабжено блоком упрежденного вычисления текущего значения загруженности межшарнирной секции фермы от.вальной консоли отвалообразователя, блоком упрежденного вычисления текущего значения опрокидывающего момента отвальной консоли отвалообразователя, блоками установки допустимых пороговых значений контролируемых параметров в соответствии с фактическим текущим состоянием оборудования, блоками адаптивного порогового контроля, блоком логического выбора параметра силового режима и индикаторами сравнения текущих значений интегральных параметров с текущими значениями порогов контроля причем выходы блоков упрежденного вычисления текущих значений загруженности отвальной консоли по всей длине, загруженности межшарнирной секции и опрокидывающего момента отвальной консоли отвалообразователя через блоки адаптивного порогового контроля подключены к входам блока логического выбора параметров силового режима, выход этого блока соединен с блоком аварийной сигнализации, блоки установки допустимых пороговых значений контролируемых параметров подключены к входам задания блоков адаптивного порогового контроля, входы адаптации Кс1ждого из которых соединены с основными входами остальных блоков адаптивного порогового контроля, а выходы текущих значений порогов этих блоков подключены к индикаторам сравнения, соединенным соответственно с выходами блоков упрежденного вычисления текущих значений загруженности отвальной консоли по всей длине, загруженности межшарнирной секции и опрокидывающего момента отвальной , кон соли отвалообразователя, 2, Устройство по п, 1, отличающееся тем, что блок упрежденного вычисления текущего значения опрокидывающего момента отвальной консоли отвалообразователя выполнен в виде модели потока материала и сумматора состояния ячеек модели потока, причем количество каналов сумматора равно количеству ячеек модели потока,
3, Устройство по п, 1,. о т л ичающееся тем, что блок адаптивного порогового контроля выполнен в виде операционного усилителя и подключенного к одному его электрически управляемого потенциометра с двумя входами управления, которые
являются входами адаптации блока, выходы операционного усилителя и электрически управляемого потенциометра соответственно являются основным выходом блока и выходом текущего значения порога, а входы операционного усилителя и электрически управляемого потенциометра являются основными входами блока.
4, Устройство по пп. 1 и 3, о тличающееся тем, что электрически управляемый потенциометр с двумя врсодами управления выполнен в виде последовательно включенных резистора и цепи соединенных параллельно резисторных оптронов, управляющие элементы которых являются входами управления электрически управляемого потенциометра.
5. Устройство по п. 1, отличающееся тем, что индикатор сравнения текущих значений интегральных параметров с текущими значениями порогов контроля силового режима выполнен в виде преобразователя электрического сигнала, вдоль шкалы которого размещены источники света, соединенные с входом текущего значения порога контроля через преобразователь аналоговой величины в унитарный позиционный код.
Источники информации, принятые во внимание при экспертизе
1.Авторское свиде;гельство СССР 5 № 386098, кл. Е 02 F 9/26, 1973.
2,Авторское свидетельство СССР 379745, кл. Е 02 F 3/26, 1973
.(прототип).

в V //
Ш-/
/ Л
.f
