2116
Ю
00 оо
14)
Изобретение относится к предохранительным устройствам и узлам сигнализации и управления роторных экскаваторов, отвало- образователей и подобных горно-транспортных машин и является усовершенствованием устройства по авт. св. № 1180461. Цель изобретения - повышение информативности контроля.
На фиг. 1 представлена схема устройства; на фиг. 2 - графики, поясняюшие принцип формирования выходных сигналов многоканального блока преобразования; на фиг. 3 - график и способ представления информации на индикаторе сравнения. Устройство содержит измеритель 1 интенсивности потока с входными датчиком 2 погонной нагрузки, с преобразователем 3, включаюшим вторичный прибор 4 и частотный преобразователь 5, и с установленным в начальной зоне конвейерной линии 6 роторного комплекса датчиком 7 скорости движения ленты конвейера. Первым выходом 8 измерителя интенсивности потока служит выход частотного преобразователя, а вторым выходом 9 - аналоговый выход вторичного прибора.
К первому выходу измерителя интенсивности потока подключен основной вход 10 модели 11 потока, к сдвиговому входу 12 которой подключен выход блока 13 контроля скорости движения ленты конвейера 14 отвальной консоли отвалообразователя, выполненного, например, в виде тахогенератора с частотным выходом. Модель потока выполнена, например, в виде последовательного сдвигового регистра.
С выходами всех ячеек 15 модели потока соединен соответствующими входами блок 16 определения полного.интегрального параметра силового режима на всей длине отвальной консоли, выполненный, например, в виде сумматора по весовой функции (т.е. с определенными масштабами входных сигналов в зависимости от номера входа) состояния всех ячеек модели потока, и подключенный своим выходом к основному входу 17 блока 18 порогового контроля, выполненного, например, в виде компаратора на операционном усилителе. Вход 19 задания блока порогового контроля подключен к за- датчику 20, а выход блока порогового контроля соединен с блоком 21 аварийной сигнализации. Задатчик выполнен, например, на основе делителя напряжения и переключателя, а блок аварийной сигнализации может представлять собой, например, штатную систему аварийной сигнализации и отключения конвейеров роторного комплекса. С выходами ячеек начальной части модели потока соединены входы многоканального блока 22 определения прогнозируемой составляюш,ей интегрального параметра на отрезках длины отвальной консоли (на фиг. 1 показан трехканальный блок для трех отрезков длины и соответственно трех разных интервалов времени прогноза). Выходы каналов 23-25 соединены с основным входом 26-28 соответствующего канала многоканального блока 29 вычисления допустимой интенсивности потока, вход 30 задания которого соединен с выходом блока установки допустимого порогового значения контролируемого параметра. Выходы 31-гЗЗ соединены с соответствующими входами 34-36 преобразователя 37 напря0 жения, выходы 38-40 которого соединены соответственно с входами 41-43 индикатора 44 сравнения. Преобразователь напряжения может .быть выполнен, например, на основе операционных усилителей: первый
t канал - в виде повторителя 45, а все остальные каналы - в виде дифференциального усилителя 46 или 47, неинвертирующий вход которого соединен с входом данного канала, а инвертирующий вход - с входным сигналом предыдущего канала.
0 Вход 48 текущей интенсивности потока индикатора сравнения соединен с вторым выходом измерителя интенсивности потока через интегратор 49. Последний может быть выполнен, например, на основе сдв.игаю- щего регистра 50 с генератором 51 им5
пульсов, подключенным к его сдвигающему входу 52, и с сумматором 53.
Входы индикатора сравнения через соответствующие входные элементы 54-57
Q соединены с соответствующими секциями 58-61 представления информации в индикаторе сравнения.
Устройство работает следующим образом.
При работе комплекса роторный экс5 каватор - отвалообразователь в измерителе 1 интенсивности потока датчик 2 погонной нагрузки выдает на вход вторичного прибора 4, входящего в преобразователь 3, текущее значение погонной нагрузки на конвейер 6 роторного экскаватора от
0 потока горной массы. На второй вход вторичного прибора 4 с блока 7 контроля скорости движения ленты конвейера 6 поступает информация о его движении, с учетом которой вторичный прибор 4 формирует на
с выходе 9 сигнал в аналоговой форме о текущей интенсивности потока (производительности конвейера 6), который подается также на вход частотного преобразователя 5 для формирования на выходе 8 информации о текущей производительности потока
0 в форме частоты импульсного сигнала (в частотно-импульсной форме). Этот сигнал с первого выхода 8 измерителя 1 интенсивности потока Б месте установки измерителя 1 (в начальной зоне конвейерной линии роторного комплекса, например, на
5 конвейере 6 роторной стрелы экскаватора) поступает на основной вход 10 модели 11 потока, а именно на первую ячейку последовательного регистра модели 11.
Записанные в первую ячейку регистра модели 11 импульсы переносятся в последующие ячейки регистра модели со скоростью, пропорциональной частоте продвигающих импульсов, поступающих на сдвиго- вый вход 12 модели -11 с выхода блока 13 контроля скорости движения ленты конвейера 14 отвальной консоли отвалообразо- вателя, причем частота продвигающих импульсов пропорциональна скорости конве
йера 14. Таким образом, скорость продвижения импульсов в модели соответствует (пропорциональна) скорости перемещения потока по отвальной консоли отвалообра- зователя, а линейное распределение импульсов, находящихся в данный момент в ячейках модели (т.е. возбужденных ячеек с состоянием «1), соответствует линейному распределению массы горной массы в моделируемом отрезке потока, который загрузит отвальную консоль после того, как отрезок потока переместится по конвейерной линии роторного комплекса и полностью загрузит отвальную консоль отвалообразо- вателя.
Информация о линейном распределении массы отрезка потока вдоль длины кон- вейера, содержащаяся в модели 11 потока в качестве возбужденных ячеек регистра, позволяет производить упрежденное определение интегральных параметров силового режима отвальной консоли, например, путем суммирования по массовой функции сое- тояния ячеек модели. При определении параметра загруженности отвальной консоли производится простое суммирование входных сигналов от возбуждения ячеек модели, т.е. частный случай суммирования по массовой функции с постоянным масщтабом вход- ных сигналов. При определении параметра опрокидывающего момента суммирование по массовой функции производится с масщта- бами преобразования отдельных сигналов от ячеек модели, возрастающими в зави- симости от номера ячейки, для учета возрастания плеча приложения силы при удалении от начала отвальной консоли.
Рассматривают определение только параметра опрокидывающего момента, как наиболее сложный вариант.
Блок 16 определения полного интегрального параметра силового режима (опрокидывающего момента) на всей длине отвальной консоли суммирует с линейно возрастающими масштабами преобразования (от нуля до наибольщего в зависимости от но- мера ячейки) входные сигналы всех ячеек модели (ненулевой входной сигнал дают только возбужденные ячейки модели). Выходной сигнал блока 16 представляет собой полный опрокидывающий момент, который создает моделированный в модели 11 отрезок потока на всей длине отвальной консоли отвалообразователя спустя время упреждения, за которое уже сформированный и
0
5 0
5 0 5 д
5
0
находящийся на конвейерах роторного экскаватора отрезок потока переместится полностью, загрузит отвальную консоль. Это значение упрежденного определяемого полного опрокидывания момента на всей длине отвальной консоли поступает на основной вход 17 блока 18 порогового контроля, на вход 9 задания которого одновременно с задатчика 20 поступает сигнал о допустимом полном опрокидывающем моменте, превыщение которого опасно для отвальной консоли и узлов ее подвески. Если в результате ощибочных действий мащиниста роторного экскаватора или непредвиденных обстоятельств на конвейера-х сформируется недопустимый по интенсивности отрезок потока, на основной вход 17 блока 18 порогового контроля поступает сигнал, превышающий значение допустимого сигнала на входе 19 задания, в результате на выходе блока 18 порогового контроля формируется сигнал, который вызывает срабатывание блока 21 аварийной сигнализации для аварийной остановки конвейеров во избежание перегрузки отвалообразователя.
Одновременно с обработкой информации в блоке 16 определения полного опрокидывающего момента на всей длине отвальной консоли информация из модели 11 потока, а именно с ячеек ее начальной части, поступает в многоканальный блок 22 определения прогнозируемой составляющей опрокидывающего момента на отрезках длины отвальной консоли. Длина начальной части модели, которая подключена к соответствующему каналу 23, 24 или 25, соответствует длине отрезка отвальной консоли, на которой прогнозируется составляющая опрокидывающего момента в данном канале многоканального блока 22. Каждый канал 23, 24 или 25 производит суммирование по массовой функции (с линейно возрастающим в зависимости от номера ячейки масщтабом преобразования) входных сигналов от возбужденных ячеек данной начальной части модели, при этом выходной сигнал канала 23, 24 или 25 представляет собой значение прогнозируемой составляющей опрокидывающего момента на соответствующем отрезке длины отвальной консоли.
Допустимое значение параметров рекомендуемой интенсивности потока, усредненных на разных временных интервалах прогноза, отсчитываемых от одного (начального) момента времени, выражается зависимостями
1яч(т) Q.c-Q.CT).-;
50
55
1 OV ig«(rn) )4г.
где ijj (m)
- допустимая на длине m отрезка интенсивность
потока, движущегося со скоростью V;
Qg, , QC(T),MC(T)- соответственно допустимые загруженность, опрокидывающий момент и прогнозируемые (на интервале прогноза т) составляющие.
В случае дискретного выполнения модели потока формулы принимают вид
: .. fQ.-Q.a) V .
m
Mg-M.o.).V
igrtG)
vn
Af ,S / 1
Например, для третьего интервала времени прогноза
AQ V
1я.г(ЗА) 3AI ;
. ,„.. AM V 1,„ (ЗА)
Для вычисления допустимой интенсивности потока, усредненной на данном интервале времени прогноза, в соответствующем канале многоканального блока 29 согласно приведенным формулам и благодаря выполнению канала в виде описанной схемы дифференциального усилителя производится вычитание значения прогнозируемой составляющей опрокидывающего момента на данном отрезке длины отвальной консоли из допустимого значения полного опрокидывающего момента на всей длине отвальной консоли, а разность между ними умножается на соответствующий данному каналу масщтабный коэффициент, величина которого находится из приведенных формул и устанавливается путем подбора от- нощения сопротивления обратной связи дифференциального усилитепля к его входному сопротивлению.
Таким образом, на выходах 31-33 многоканального блока 29 вычисления допустимой интенсивности потока появляются значения допустимой интенсивности потока, усредненной на разных интервалах времени прогноза. Эти значения с выходов 31-33 многоканального блока 29 поступают на соответствующие входы 34-36 преобразователя 37 напряжения, принцип работы которого пояснен на фиг. 2.
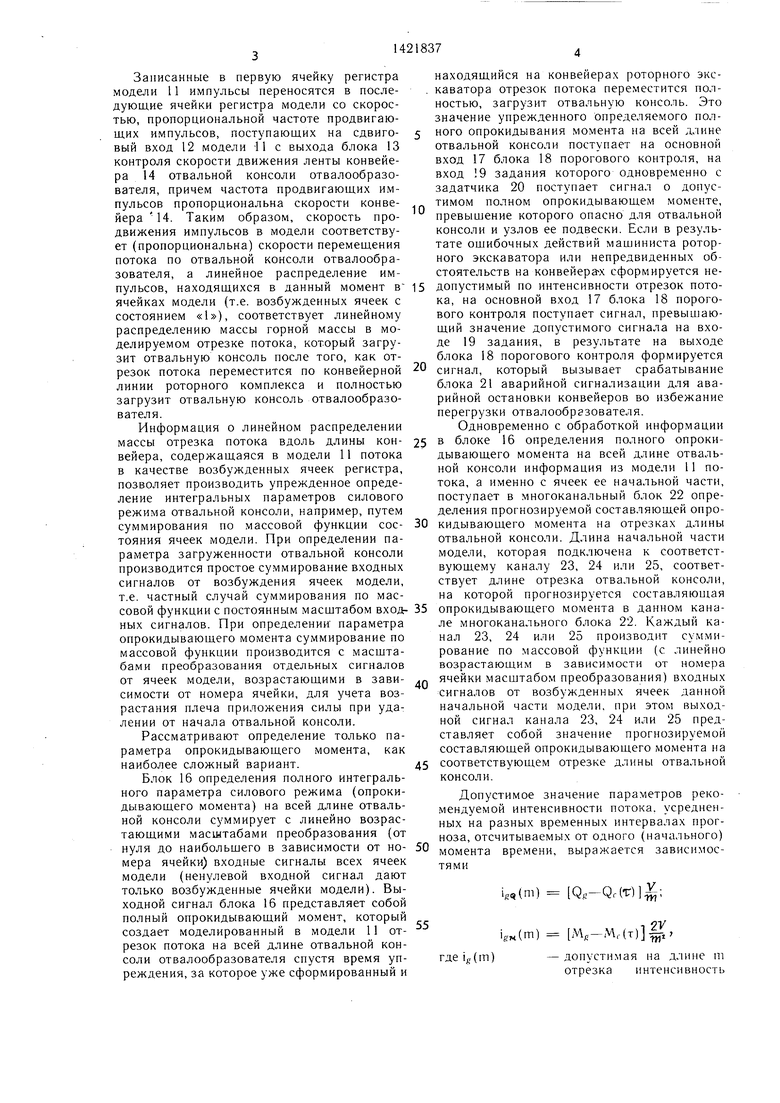
Кривая А первичной усредненной зависимости образована формируемыми преобразователем 37 ординатами и, 2 и is интенсивности, усредненной соответственно на первом, на втором и третьем одинаковых временных интервалах прогноза At.
Кривая В, формируемая блоком 29 и выводимая на индикатор в известном устройстве, представляет собой вторичную зависимость ординат ii, ill и ini интенсивности, усредненной соответственно за одинарный, двойной и тройной временные интервалы прогноза At, 2At и 3At от началь- нгого момента времени.
На фиг. 2 показан режим выхода из пред- аварийного состояния, когда необходимо снижение интенсивности потока непосредственно по первичной кривой А, т.е. более резкое, чем это может осуществлять ма- щинист, исходя из вторичной кривой В,
индицируемой по известному устройству. Ординаты указанных кривых А и В связаны между собой следующим образом;
15
is (11 + 12); if, --| (11+12+13):
i,|-(ii+i2+... + i/);
ii ii;
-i, ;
-i2-ii 3in, -2i5
(f-1)
Преобразователь 37 напряжения осуществляет преобразование ординат кривой В (фиг. 2) -в ординаты кривой А, причем веичины сопротивлений входных резисторов и резисторов обратной связи в каналах преобразователя 37 напряжения выбраны
таким образом, что маощтабные коэффициенты (отнощение сопротивления обратной связи к входному сопротивлению) операционных усилителей в каналах преобразователя 37 напряжения соответствуют приведенным формулам преобразования.
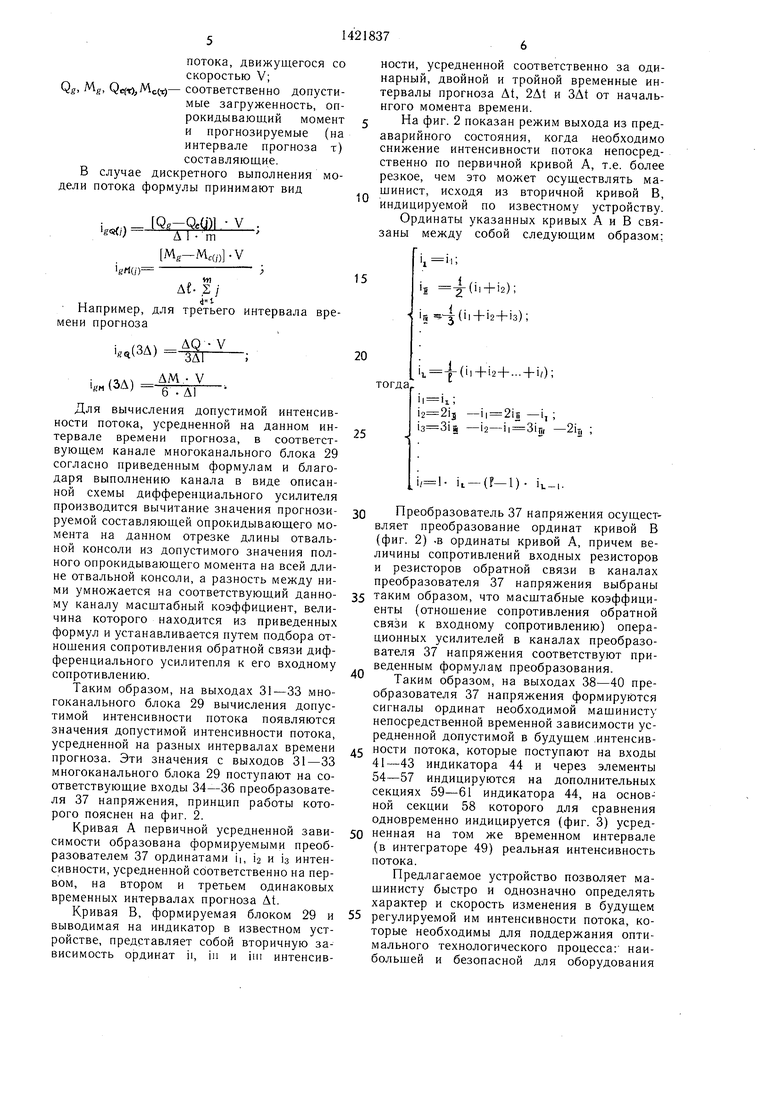
Таким образом, на выходах 38-40 преобразователя 37 напряжения формируются сигналы Ординат необходимой мащинисту непосредственной временной зависимости усредненной допустимой в будущем .интенсивности потока, которые поступают на входы 41-43 индикатора 44 и через элементы 54-57 индицируются на дополнительных секциях 59-61 индикатора 44, на основной секции 58 которого для сравнения одновременно индицируется (фиг. 3) усредненная на том же временном интервале (в интеграторе 49) реальная интенсивность потока.
Предлагаемое устройство позволяет машинисту быстро и однозначно определять характер и скорость изменения в будущем
регулируемой им интенсивности потока, которые необходимы для поддержания оптимального технологического процесса; наибольшей и безопасной для оборудования
текущей интенсивности потока (производительности) без нежелательных перерывов нормального процесса экскавации в результате аварийных остановок конвейеров и режима их безопасной разгрузки.
Формула изобретения
Устройство для контроля и управления
режимом работы роторного комплекса по
авт. св. № 1180461, отличающееся тем, что,
с целью повышения информативности контроля, в него введены преобразователь напряжения и интегратор, выход которого соединен с одним входом индикатора сравнения, выходы многоканального блока вычисления допустимой интенсивности потока соединены с входами преобразователя напряжения, выходы которого соединены с другими входами индикатора сравнения, второй выход измерителя интенсивности потока соединен с входом интегратора.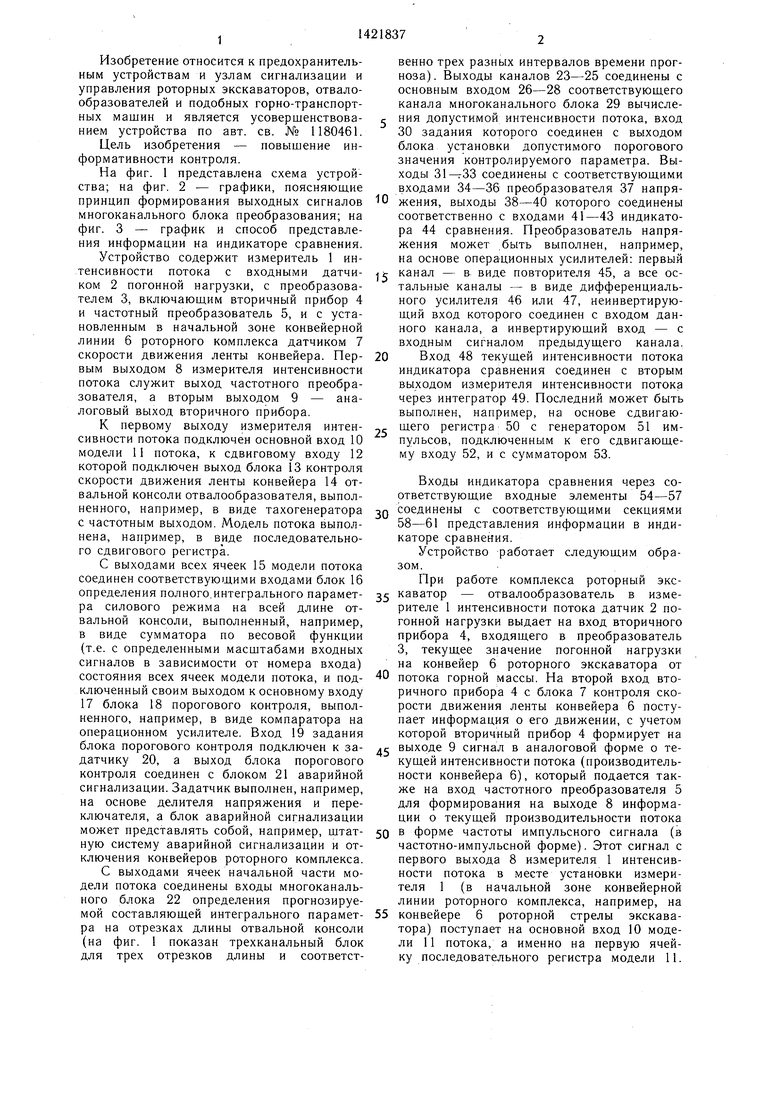
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и управления режимом работы роторного комплекса | 1984 |
|
SU1180461A1 |
| Устройство для автоматизированного контроля силового режима металлоконструкций машин роторных комплексов | 1984 |
|
SU1209772A1 |
| Устройство для автоматизированного контроля загруженности металлоконструкций оборудования роторных комплексов | 1981 |
|
SU977622A1 |
| Устройство для автоматизированного контроля загруженности металлоконструкций оборудования роторных комплексов | 1983 |
|
SU1145098A2 |
| Устройство для автоматизированного контроля силового режима металлоконструкций оборудования роторных комплексов | 1984 |
|
SU1159991A1 |
| Способ управления роторным комплексом и устройство для его осуществления | 1987 |
|
SU1537776A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОНТРОЛЯ ЗАГРУЗКИ СТРЕЛЫ ОТВАЛООБРАЗОВАТЕЛЯ ПОРОДОЙ | 1973 |
|
SU386098A1 |
| Система автоматизированного управления роторным экскаватором | 1985 |
|
SU1266942A2 |
| Система автоматизированного управления роторным экскаватором | 1983 |
|
SU1164374A1 |
| Устройство для управления загрузкой сыпучих материалов в железнодорожные полувагоны | 1978 |
|
SU906873A1 |
Изобретение относится к предохранительным устр-вам и узлам сигнализации и управления роторных экскаваторов. С целью повышения информативности контроля в устр-во введены преобразователь напряжения (ПН) 37 и интегратор 49. Выход интегратора 49 соединен с одним входом 48 индикатора 44 сравнения, с другими входами 41-43 которого соединены выходы 38-40 ПН 37. К входам 34-36 ПН 37 подключены выходы 31-33 многоканального блока 29 вычисления допустимой интенсивности потока (ИП). К входу интегратора 49 подключен выход 9 измерителя 1 ИП. Второй его выход 8 подключен к основному входу 10 модели 11 потока, к сдвиговому входу 12 которой подключен выход блока 13 контроля скорости движения ленты конвейера 14 отвальной консоли (ОК) отвалообразователя. С выходами всех ячеек 15 модели 11 соединен входами блок 16 определения полного интегрального параметра силового режима по всей длине ОК, подключенный своим выходом к основному входу 17 блока 18 порогового контроля. Его вход 19 задания соединен с задат- чиком 20, а выход - с блоком 21 аварийной сигнализации. С выходами ячеек модели 11 соединены входы многоканального блока 22 определения прогнозируемой составляющей интегрального параметра на отрезках длины ОК. Выходы 26-28 блока 22 и выход задатчика 20 подключены к входам блока 29. Устр-во позволяет быстро и однозначно определять характер и скорость изменения в будущем регулируемой им ИП, которые необходимы для поддержания оптимального технологического процесса. 3 ил. со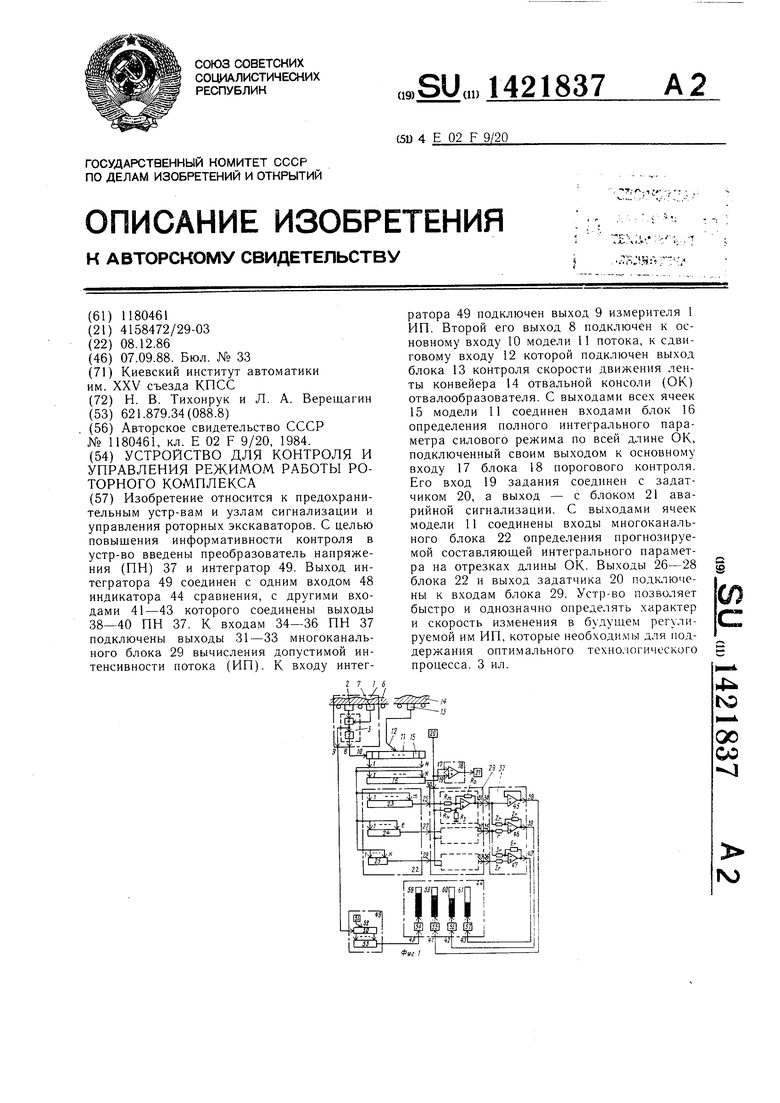
-At
О
Paa.J
3At t
JAt t
| Устройство для контроля и управления режимом работы роторного комплекса | 1984 |
|
SU1180461A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
