;п1 п япляютсл нхндом функгптоиачьного прс обрачователя, выходы компараторов подключены к управляющим входам ключей, которые соединены последователь- по с соответствующим резистором и подключены в обратную связь операционного усилителя, выход которого является выходом функционального преобразователя.
Изобретение относится к предохранительным устройствам и узлам сигнализации и управления роторных экскаваторов, отвалообразонателей и подобных машин.
Цель изобретения - повьтигение надежности устройства за счет возможности предохранения металлоконструкций от недопустимых перег рузок с учетом совместного воздействия статических и динамических напряжений.
Функциональный преобразователь огфеделяет значение резонансной частоты консоли с данным отрезком грузопотока. Анализатор резонансных колебаний определяет ожидаемую силу резонансных колебаний консоли, соответствующую величине динамической составляющей нагрузки, и формирует сигнал на вход адаптации блока адаптивного порогового контроля для занижения допустимого порога контролируемого параметра силового режима защищаемых металлоконструкций. Таким образом, предлагаемое устройство позволяет предохранять металлоконструкции от недопустимых перегрузок с учетом
совместного возде11ствия статических и динамических напряжений.
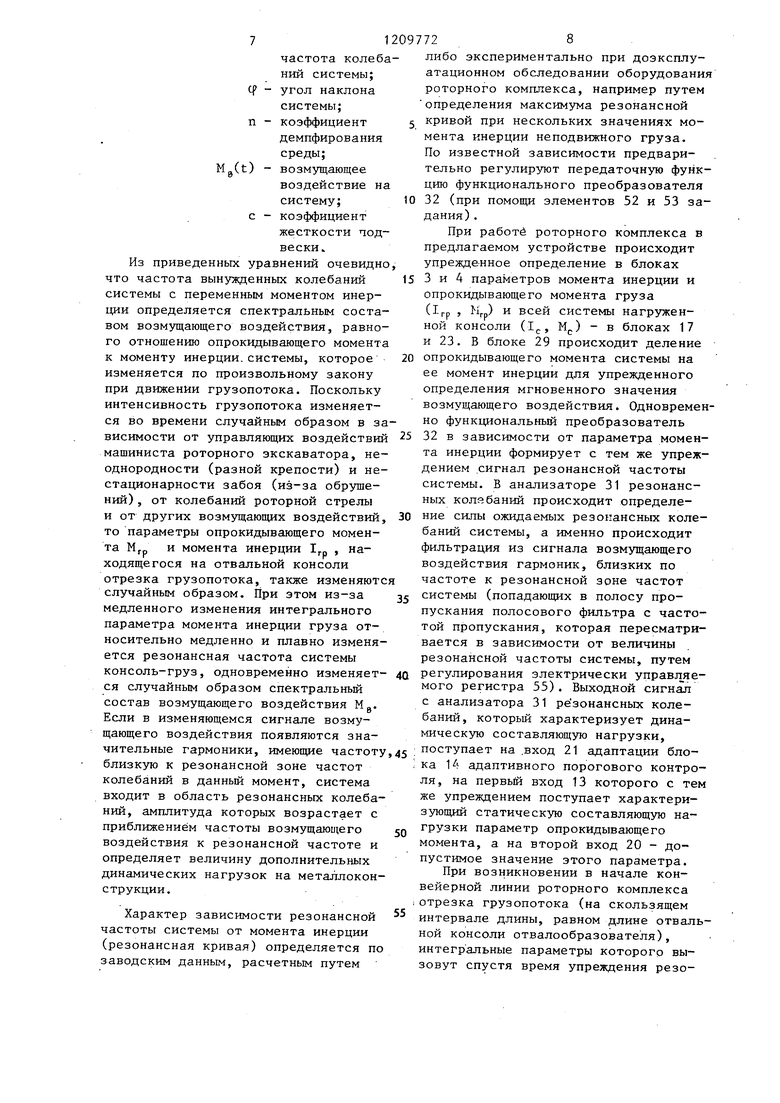
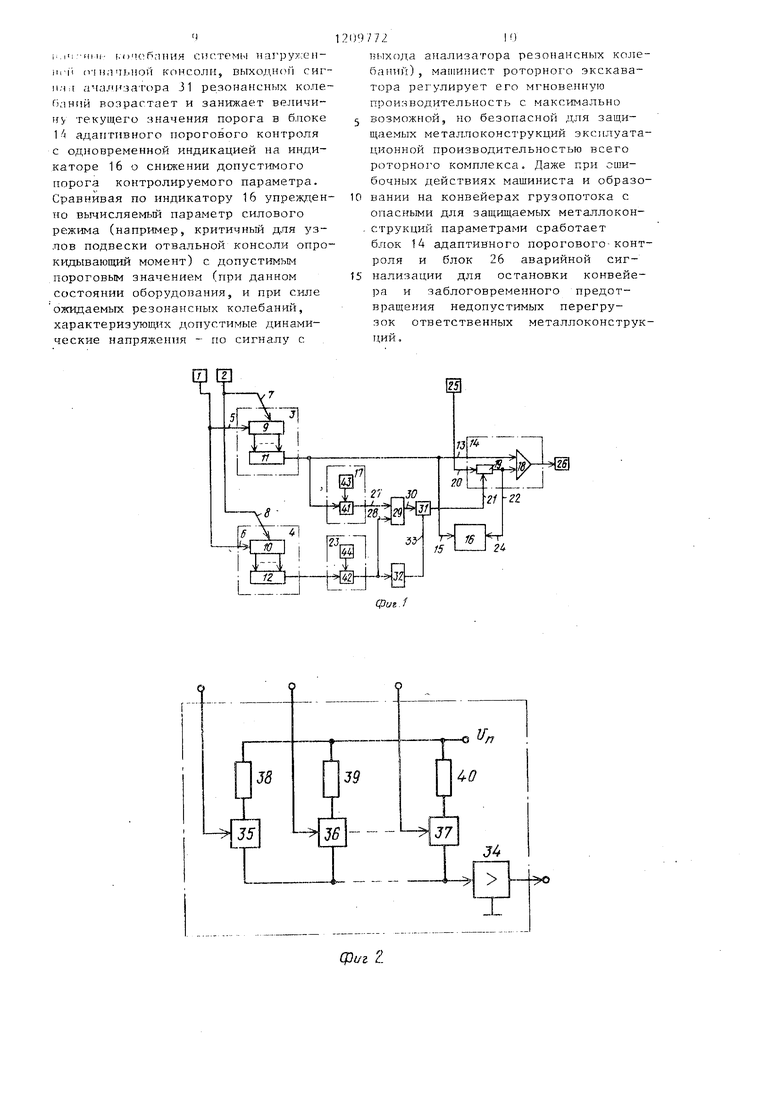
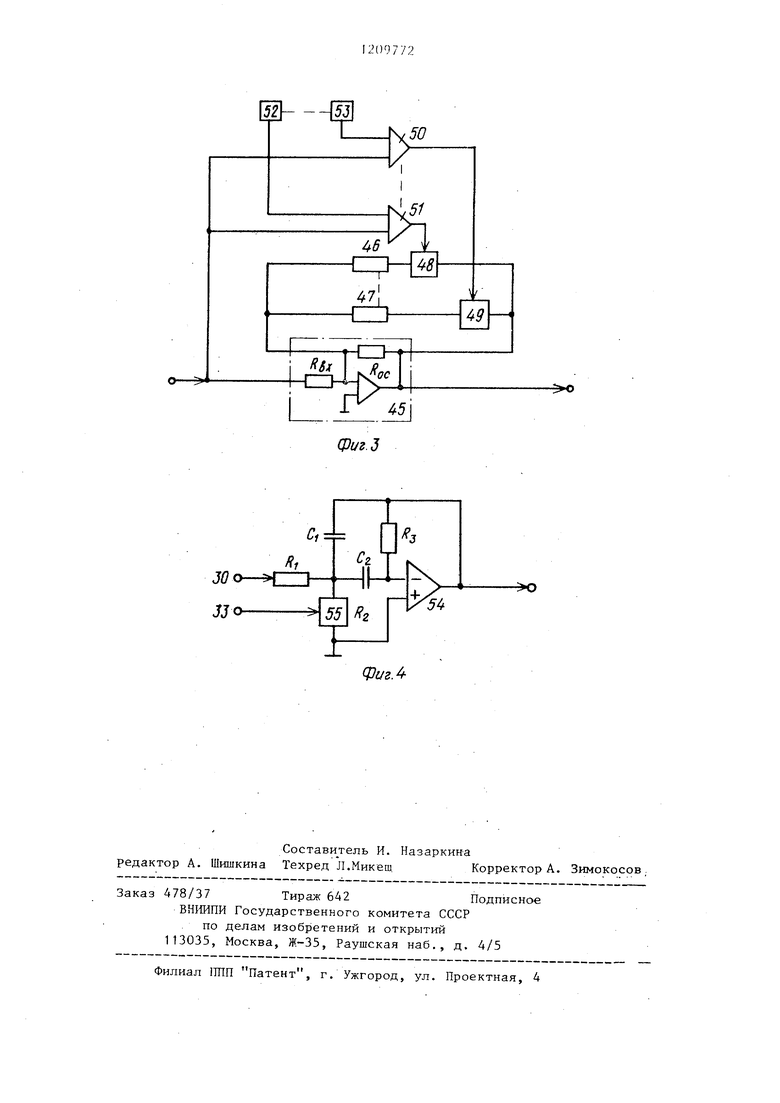
На фиг. 1 представлена схема предлагаемого устройства; на фиг. 2 - схема сумматора блока опре7.;еле1П1я момента инерции; на фиг. 3 - схема функционального преобразователя; на фиг. 4 - схема я 1ализатора резонансных колебаний.
Устройство содержит измеритель 1 интенсивности потока (выполненный, например, на основе датчиков погонной нагрузки и скорости лент11 и преобразователя с частотным выходом), установленнь в начальной зоне кон |. YcrrpoiicT B n по П.1, (1 т л и - ч а 10 |д е е с я тем, что анализато; резо 1ансиых колебаний выполнелг в виде операционного усилителя, на вход которого включен управляемый резистор, входы которого являются входами анализатора резонансных колебаний, выходом которого является-выход опера- ;ионного усилителя.
вейерной линии роторного комплекса, в частности на роторной стреле экскаватора. Устройство включает также блок 2 контроля скорости движения
лент конвейеров, выполненный, например, на основе тахогенератора с час- тотн1)м выходом и контролирующий работу конвейера отвальной консоли от- валообразователя. Блок 3 упрежденного вычисления опрокидывающего момента и блок 4 определения момента инерции своими основными входами 5 и 6 соединены с вых одом измерителя 1 интенсивности потока, а своими сдвиговыми входами 7 и 8 - с выходом блока 2 контроля скорости движения лент конвейеров. Кащтьш из блоков 3 и 4 выполнен, например, в виде моделей 9 и 10 потока на последовательном
сдвигающем рег истре, которые подключены соответственно к входам сумматоров 11 и 12. Причем сумматор 11 выполнен с 1п нейно возрастающим, а сумматор 12 - с квадратично возрастающим в зависимости от номера ячейки масштабом преобразования входных сигналов от ячеек модели потока.
Выход блока 3 упрежденного вычисленная опрокидывающегсэ .момента соедин н с первым входом 13 блока 14 адаптивного порог ового контроля, а также с основным входсзм 15 индикатора 16 и входом втсзрог о блока 17 суммирования .
Блок 14 адаптивного порогового .контроля выполнен, например, в )мде KONinapaTopa 18 на операционном усилителе с подключенным к одному его вхрду эле ктрическкм управляемым
потенциометром 19, например, на полевом транзисторе: илм на параллельных резис торши х оитрпн,).:.;. Информлпиониым , вход упрапяения и пыход ). управляемого потенциометра 19 для всего блока 14 адаптивного порогового контроля являются соответственно входом 20, третьим входом 21 и вторым выходом 22.
Выход блока 4 определения момента инерции соединен с входом первого блока 23 суммирования. Вход 24 задания индикатора 16.соединен с вторым выходом 22 блока 14 адаптивного порогового контроля.
Блок 25 установки допустимого порогового значения контролируемого параметра выполнен, например, на основе делителя напряжения или переключателя и подключен своим выходом к входу 20 задания блока 14 адаптивного порогового контроля, выход которого соединен с блоком 26 аварийной сигнализации. Первый 23 и второй 17 блоки суммирования своим выходом соединены соответственно с первым 28 и вторым 27 входами блока 29 деления, выход которого соединен с первым входом 30 анализатора 31 резонансных колебаний. Выход первого блока 23 суммирования соединен также с входом функционального преобразователя 32, выход которого соединен с вторым входом 33 анализатора 31 резонансных колебаний. Выход анализатора 31 резонансных колебаний соединен с третьим входом 21 блока 14 адаптивного порогового контроля.
Каждая модель потока (соответственно 9 и 10) в блоках 3 и 4 выполнена, например, в виде последовательного сдвигающего регистра. Сумматор 12 блока 4 определения момента инерции выполнен, например, на основе усилителя 34 (фиг. 2) с ключами 35-37, которые в случае возбужденной ячейки модели потока (триггер ячейки в состоянии 1) подключают стабилизированное напряжение питания на вход усилителя 34 через соответст вуюгцие калиброванные входные резисторы 38-40. Величины входных сопротивлений подобраны так, чтобы входные проводимости, т.е. масштабы преобразований, возрастали в зависимости от квадрата номера ячейки модели потока. При этом выходной сигнал усилителя 34 пропорционален интегральному параметру опрокидывающего момента транспортируемого по конвейеру консоли груза, так как в сумматоре 12 происходит суммирование
5
0
5
0
0
5
0
5
произведений единртчного веса грулл (по сигналам от возбужденных ячеек модели) на квадрат расстояния до оси консоли (квадрат номера ячейки модели потока задается подобранными масштабами преобразования входных сигналов сумматора).
Аналогично сумматору 12 выполнен сумматор 11 блока 3 упрежденного вычисления опрокидывающего момента, однако его входные проводимости (масштабы преобразований входных сигналов от ячеек модели 9) подобраны линейно возрастающими в зависимости от номера ячейки модели. При этом выходной сигнал сумматора 11 и всего блока 3 пропорционален интеграль- . ному параметру опрокидывающего момента груза, так как в сумматоре 11 происходит суммирование произведений единичного веса груза на плечо действия силы (масштабы преобразования сумматора 11 пропорциональны номеру ячейки модели 9).
Первый 23 и второй 17 блоки суммирования выполнены идентично, например, в виде элементов суммирования 42 и 41 соответственно (на основе операционного усилителя) с элементами 44 и 43 соответственно. Элементом 43 задания задается значение постоянного слагаемого, с которым суммируется значение сигнала, поступающего на вход данного, блока (например, блока 17) суммирования.
Функциональный преобразователь 32 выполнен, например, в виде масштабирующего элемента (фиг. 3) на основе операционного усилителя 45 с набором сопротивлений 46 и 47 обратной связи, включенных гЁараллельно через ключи 48 и 49, управляемые компараторами 50 и 51 (например, на операционных усилителях), основные входы которых соединены с входом масштабирующего элемента 45. При такой схеме функциональный преобразователь 32 осуществляет ступенчатую аппроксимацию требуемой передаточной функции снижения частоты резонансных колебаний нагруженной отвальной консоли при увеличении ее момента инерции: выходной сигнал сравнивается компараторами 50 и 51 с пороговыми уставками аргумента, устанавливаемыми при помощи элементов 52 и 53 задания, и в зависимости от величины аргумен- та соответствующие ключи шунтируют
5
сопротивления обратной связи усилителя .
Анализатор 31 резонансных колебаний выполнен, например, в виде перестраиваемого полосового фильтра, в частности в виде активного полосового ф1-шьтра с многопетлевой обратной связью (фиг. 4), который вьтолнен на основе операционного уснгсителя 5 с электрически управляемым регист- ром 55 (например, на полевом транзисторе) , сопротивление которого определяет среднюю часФоту пропускания фильтра.
Устройство работает следующим образом.
При работе комплекса экскаватор- отвалообразователь в измерителе 1 интенсивности потока измеряются по- г онная нагрузка и скорость транспортируемого конвейером груза (датчиками погонной нагрузки и скорости ленты) и вычисляется текущая производительность, т.е. интенсивность потока, которая формируется на выход измерителя 1 в частотно-импульсной форме Одновременно блок 2 контроля скорости движения ленты конвейера формирует сигнал в частотно-импульсной форме, причем его частота пропорциональна скорости движения конвейера отвальной консоли отвалообра зователя. Сигналы об интенсивности потока на конвейере экскаватора и скорости движения конвейера от- вальвой консоли поступают соответственно на основные 5 и 6 и сдвиговые 7 и 8 входы моделей 9 и 10 потока. 1мпульсный сигнал об интенсивности потока поступает с измерителя 1 на первую ячейку последовательного сдвгающего регистра соответственно модлей 9 и 10 потока, а содержание ячеек регистра моделей переносится последующие ячейки регистра со скоростью, пропорциональной частоте, поступающей с блока 2 на сдвиговые входы 7 и 8 моделей 9 и 10, т.е. пропорционально скорости движения груза на отвальной консоли. Количес ко импульсов и их распределение по длине модели в данный момент соответствует весовому количеству и распределению по длине отвальной консоли горной массы, которое загрузит металлоконструкции отвальной консол после транспортирования груза от мета установки измерителя 1 интенсив
s 0
5
0 5 5 5
0
5
726
ности потока ни экскаваторе до отвальной консоли отвалообразователя (т.е. спустя время упреждения).
Сумматор 11 блока 3 упрежденного вычисления опрокидывающего момента формирует на выходе аналоговьп1 сигнал, соответствующий текущему значению опрокидывающего момента груза, действующего на отвальную консоль спустя время упреждения. Одновременно сумматор 12 блока 4 определения момента инерции формирует на выходе аналоговый сигнал, соответ- cтвyюш й текущему значению момента инерции груза относительно оси качания отвальной консоли спустя то же время упреждения.
В первом и втором блоках суммирования происходит суммирование текущих значений указанных параметров груза (опрокид,ывающего-момента и момента инерции) с постоянными значениями аналоговых параметров собственно отвальной консоли без груза. При этом на выходе блоков 17 и 23 суммирования формируются сигналы соответственно опрокидывающего момента и момента инерции консоли с грузом, Значения опрокидывающего момента и момента инерции пустой отвальной консоли (без груза) легко определяются по данным завода-изготовителя отвалообразователя, расчетным или экспериментальным путем и вводятся предварительно в элементы 43 и 44 задания. Шарнирно закрепленная одним концом отвальная консоль отвалообразователя на винтовой подвеске при транспортировании по конвейеру переменного во времени грузопотока представляет собой механическую систему консоль-груз с переменным моментом инерции, совершающую вынужденные колебания под действием изменяющегося опрокидывающего момента. Колебания системы в общем виде описываются дифференциальными уравнениями
3,(t)c r-bCf iCQ -M..t); . b . с
Г
J (- - / J
4 -2nq.tp cVb)j
MfW
(tl
-Mt),
T(t) I, + I,p (t)M(t)M,+M,,p(t)p(i)-.
момент инерции системы; опрокидывающий момент системы, собственная
M,(t)
частота колебаний системы; ср - угол наклона
системы; п - коэффициент демпфирования среды; возмущающее воздействие на систему; с - коэффициент
жесткости подвески
Из приведенных уравнений очевидно что частота вынужденных колебаний системы с переменным моментом инерции определяется спектральным составом возмущающего воздействия, равного отношению опрокидывающего момента к моменту инерции.системы, которое изменяется по произвольному закону при движении грузопотока. Поскольку интенсивность грузопотока изменяется во времени случайным образом в зависимости от управляющих воздействий машиниста роторного экскаватора, неоднородности (разной крепости) и нестационарности забоя (из-за обрушений) , от колебаний роторной стрелы и от других возмзгщающих воздействий, то параметры опрокидывающего момени
та М,
и момента инерции I..,, , на
rfJ i- iv i. ii4-ii л « xj.ai 1. -ГП 9
ходящегося на отвальной консоли отрезка грузопотока, также изменяютс случайным образом. При этом из-за медленного изменения интегрального параметра момента инерции груза относительно медленно и плавно изменяется резонансная частота системы консоль-груз, одновременно изменяется случайным образом спектральный состав возмущающего воздействия Mg. Если в изменяющемся сигнале возмущающего воздействия появляются значительные гармоники, имеющие частоту близкую к резонансной зоне частот колебаний в данный момент, система входит в область резонансных колебаний, амплитуда которых возрастает с приближением частоты возмущающего воздействия к резонансной частоте и определяет величину дополнительных динамических нагрузок на металлоконструкции.
Характер зависимости резонансной частоты системы от момента инерции (резонансная кривая) определяется по заводским данным, расчетным путем
,
097728
либо экспериментально при доэксплу- атационном обследовании оборудования роторного комплекса, например путем определения максимума резонансной 5 кривой при нескольких значениях момента инерции неподвижного груза. По известной зависимости предварительно регулируют передаточную функцию функционального преобразователя
10 32 (при помощи элементов 52 и 53 задания) .
При работе роторного комплекса в предлагаемом устройстве происходит упрежденное определение в блоках
15 3 и 4 параметров момента инерции и опрокидывающего момента груза drp , Мгр) и всей системы нагруженной консоли ((- Мр) - в блоках 17 и 23. В блоке 29 происходит деление
20 опрокидывающего момента системы на ее момент инерции для упрежденного определения мгновенного значения возмущающего воздействия. Одновременно функциональный преобразователь 25 32 в зависимости от параметра момента инерции формирует с тем же упреждением сигнал резонансной частоты системы. В анализаторе 31 резонансных колебаний происходит определе30 ние силы ожидаемых резонансных колебаний системы, а именно происходит фильтрация из сигнала возмущающего
5
Q
5
0
5
воздействия гармоник, близких по частоте к резонансной зоне частот системы (попадающих в полосу пропускания полосового фильтра с частотой пропускания, которая пересматривается в зависимости от величины резонансной частоты системы, путем регулирования электрически управляемого регистра 55). Выходной сигнал с анализатора 31 резонансных колебаний, который характеризует динамическую составляющую нагрузки, поступает на .вход 21 адаптации блока 14 адаптивного порогового контроля, на первьй вход 13 которого с тем же упреждением поступает характеризующий статическую составляющую нагрузки параметр опрокидывающего момента, а на второй вход 20 - допустимое значение этого параметра. При возникновении в начале конвейерной линии роторного комплекса отрезка грузопотока (на скользящем интервале длины, равном длине отвальной консоли отвалообразователя), интегральные параметры которого вызовут спустя время упреждения резоi:.i ;:-niii. |.()п.с бпння сис.темы Tiai py T:eИ iii i i (I l iin 4j..Hort консоли, выходн( сиг- 11.4:1 ача.из Ч 1 ора J1 резонансных коле- С).чняй возрастает и занижает величи- иу текущего значения порога в блоке 1Л адагггивного порогового контроля с одновременной индикацией на индикаторе 16 о снижении допустимого порога контролируемого параметра. Сравнивая по индикатору 16 упрежден- но вычисляемый параметр силового режима (например, критичный для узлов подвески отвальной консоли опрокидывающий момент) с допустимым пороговым значением (при данном состоянии оборудования, и при силе ожидаемых резонансных колебаний, характеризующих допустимые динамические напряжения - по сигналу с
121)9772ID
т ыхода анализатора резонансных колебаний) , машинист роторного экскаватора регулирует его мгновенную производительность с максимально 5 возможной, но безопасной для защищаемых металлоконструкций эксплуатационной производительностью всего роторного комплекса. Даже при ошибочных действиях машиниста и образо10 вании на конвейерах грузопотока с
опасными для защищаемых металлокон- , струкций параметрами сработает блок 14 адаптивного порогового-контроля и блок 26 аварийной сиг15 нализации для остановки конвейера и заблоговременного предотвращения недопустимых перегрузок ответственных металлоконструк- г;ий.
2i
Cpug.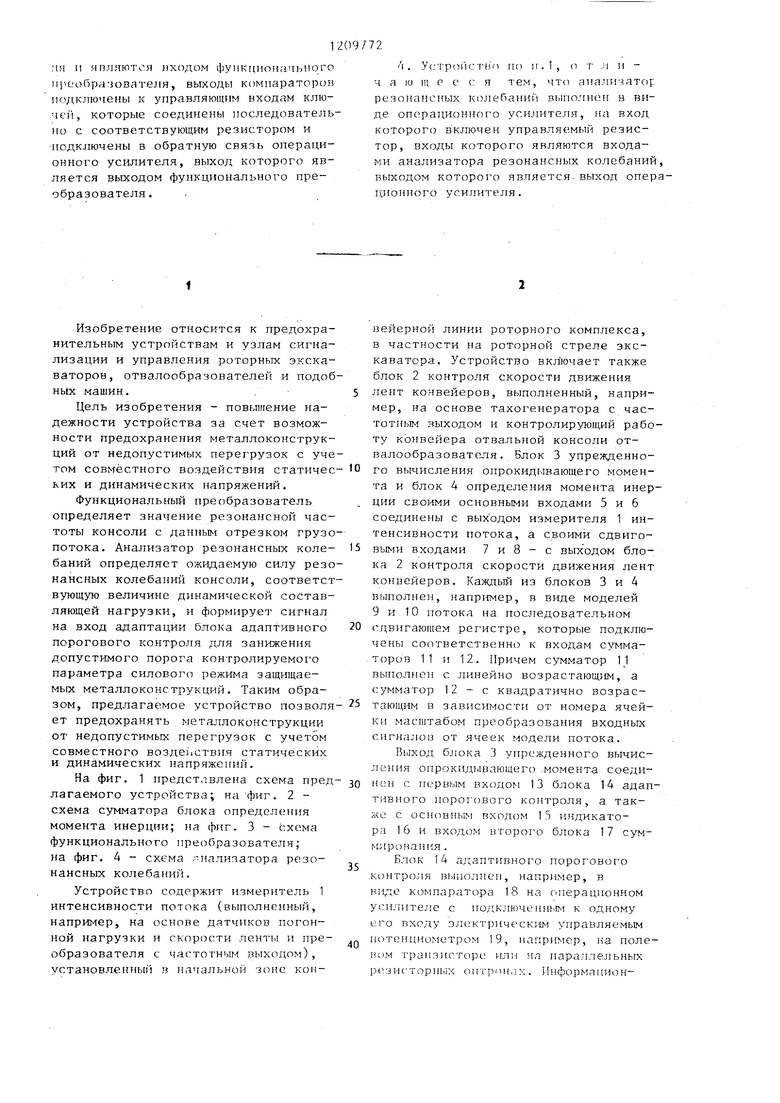


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматизированного контроля загруженности металлоконструкций оборудования роторных комплексов | 1983 |
|
SU1145098A2 |
| Устройство для автоматизированного контроля силового режима металлоконструкций оборудования роторных комплексов | 1984 |
|
SU1159991A1 |
| Устройство для автоматизированного контроля загруженности металлоконструкций оборудования роторных комплексов | 1981 |
|
SU977622A1 |
| Устройство для контроля и управления режимом работы роторного комплекса | 1986 |
|
SU1421837A2 |
| Устройство для контроля и управления режимом работы роторного комплекса | 1984 |
|
SU1180461A1 |
| Способ управления роторным комплексом и устройство для его осуществления | 1987 |
|
SU1537776A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОНТРОЛЯ ЗАГРУЗКИ СТРЕЛЫ ОТВАЛООБРАЗОВАТЕЛЯ ПОРОДОЙ | 1973 |
|
SU386098A1 |
| Способ управления регулируемым приводом конвейерного тракта роторных комплексов | 1985 |
|
SU1493569A1 |
| Устройство для контроля силового режима металлоконструкций горно-транспортных машин | 1985 |
|
SU1305274A1 |
| Способ возведения ограждающих дамб хвостохранилищ на внутренних отвалах горизонтальных месторождений | 1984 |
|
SU1260521A1 |
Ф//г г
Составитель И. Назаркина редактор А. Шишкина Техред Л.Микеш Корректор А. Зимокосов,
Заказ 478/37 Тираж 642Подписное
ВНШПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал 1ШП Патент, г. Ужгород, ул. Проектная, 4
7г/2.4
| Устройство для защиты металлоконст-РуКций РОТОРНОгО эКСКАВАТОРА OT HE-дОпуСТиМыХ диНАМичЕСКиХ НАпРяжЕНий | 1978 |
|
SU804772A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматизированного контроля загруженности металлоконструкций оборудования роторных комплексов | 1981 |
|
SU977622A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
