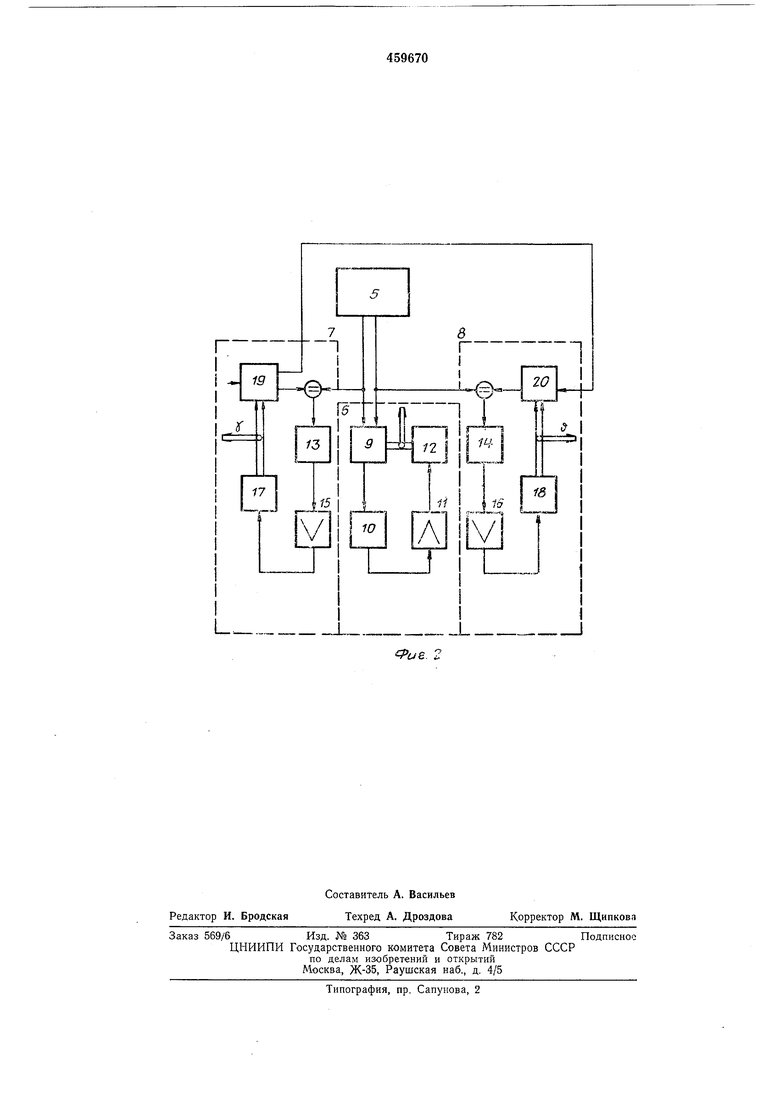
13, а выходная обмотка «продольного эонда 1 -с синуюной обмоткой ротора СКВТ 20 и фильтром 14. Выходные каскады фильтров 13, 14 через усилители 15, 16 подключены к управляющим обМоткам двигателей 17, 18. Роторы двигателей 17, 18 механически соединены соответственно с роторами СКВТ 19, 20. Обмотка статора СКВТ Г9 залитана от источника питания обмотки 4, а обмотка статора СКВТ 20 соединена последовательно с синусной обмоткой ротора СКВТ 19.
Измеритель углов поворота подвижного объекта работает следующим образом.
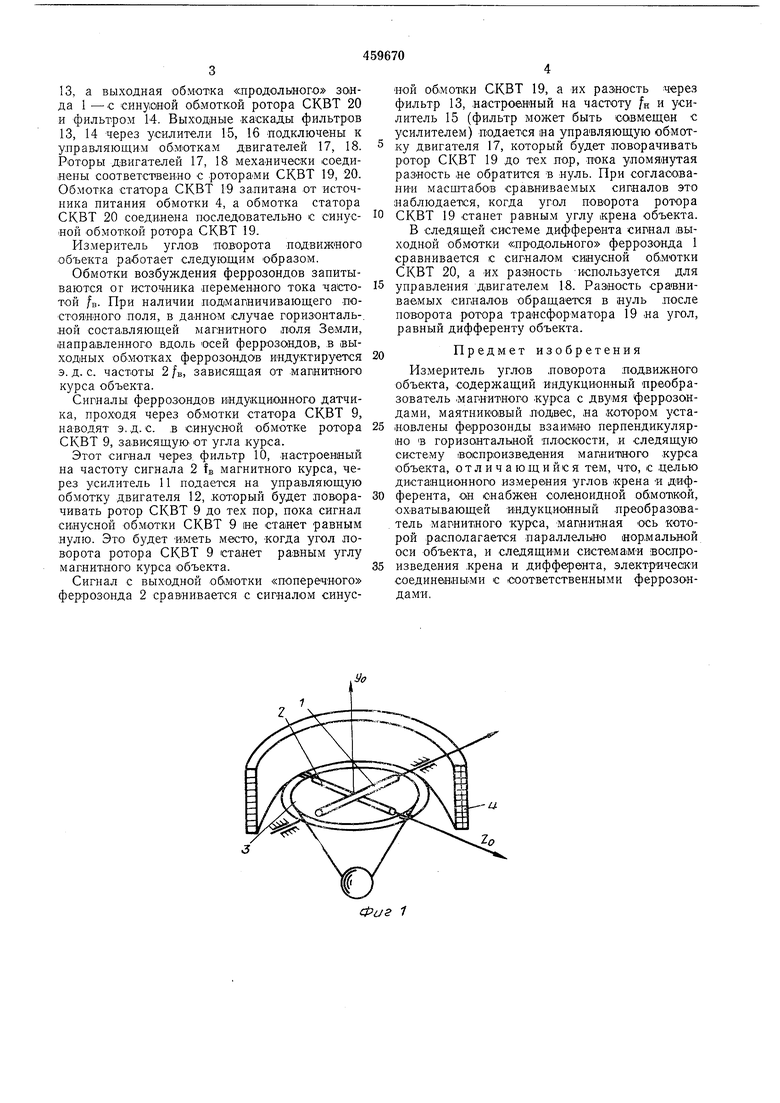
Обмотки возбуждения феррозондов запитываются от источника переменного тока частотой /в. При наличии подмагничивающего -постоянного поля, в данно-м 1случае горизонталь-, ной составляющей магнитного ,поля Земли, направленного вдоль осей феррозондов, в выходных обмотках феррозондов индуктируется э. д. с. частоты 2 /в, зависящая от магнитного курса объекта.
С,ипналы феррозондов индукционного датчика, проходя через обмотки статора СКВТ 9, наводят э.д. с. в синусной обмотке ротора СКВТ 9, зависящую от угла курса.
Этот сигнал через, фильтр 10, настроенный на частоту сигнала 2 IB магнитного курса, через усилитель 11 подается на управляющую обмотку двигателя 12, .который будет поворачивать ротор СКВТ 9 до тех пор, пока сигнал синусной обмотки СКВТ 9 не станет равным нулю. Это будет иметь место, когда угол поворота ротора СКВТ 9 станет равным углу магнитного курса объекта.
Сигнал с выходной обмотки «поперечного феррозонда 2 сравнивается с сигналом синусНОЙ обмотки СКВТ 19, а нх разность через фильтр 13, настроенный на частоту /н и усилитель 15 (фильтр может быть совмещен с усилителем) подается на управляющую обмотку двигателя 17, который будет поворачивать ротор СКВТ 19 до тех пор, пока упомя1Нутая разность не обратится в нуль. При согласовании масштабов сравниваемых сигналов это наблюдается, когда угол поворота ротора СКВТ 19 станет равным углу крена объекта. В следящей системе дифферента сигнал 1выходной обмотки «продольного феррозонда 1 сравнивается с сигналом синусной обмотки СКВТ 20, а их разность используется для управления двигателем 18. Разность сравниваемых сигналов обращается в нуль после поворота ротора трансформатора 19 на угол, равный дифференту объекта.
Предмет изобретения
Измеритель углов поворота подвижного объекта, содержащий индукционный нреобразователь .магнитного курса с двумя феррозондами, маят11ико вый подвес, на котором установлены феррозонды взаимно перпендикулярно В горизонтальной плоскости, и следящую систему воспроизведения магнитного курса объекта, отличающийся тем, что, с целью дистанционного измерения углов крена и дифферента, он снабжен соленоидной обмоткой, охватывающей индукционный преобразователь магнитного курса, магнитная ось которой располагается параллелшо иормальной оси объекта, и следящими систесмами воспроизведения крена и дифферента, электрически соединенными с соответственными феррозондами.
| название | год | авторы | номер документа |
|---|---|---|---|
| КУРСОВАЯ СИСТЕМА | 2004 |
|
RU2279636C1 |
| Устройство для определения азимута | 1986 |
|
SU1377586A1 |
| Устройство для определения азимута | 1986 |
|
SU1377585A1 |
| КУРСОВАЯ СИСТЕМА | 2008 |
|
RU2381452C1 |
| ИНДУКЦИОННЫЙ КОМПАС | 1973 |
|
SU395716A1 |
| Измеритель углов поворота подвижного объекта | 1984 |
|
SU1186948A1 |
| Автономный одноточечный инклинометр | 1988 |
|
SU1564331A1 |
| Измеритель составляющих углов поворота подвижного объекта | 1983 |
|
SU1145248A1 |
| Устройство для измерения магнитного курса | 1978 |
|
SU769329A1 |
| Устройство для контроля комплекса параметров траектории скважин и угла установки отклонителя бурового инструмента | 1982 |
|
SU1078041A1 |
L
J
ae. 2
