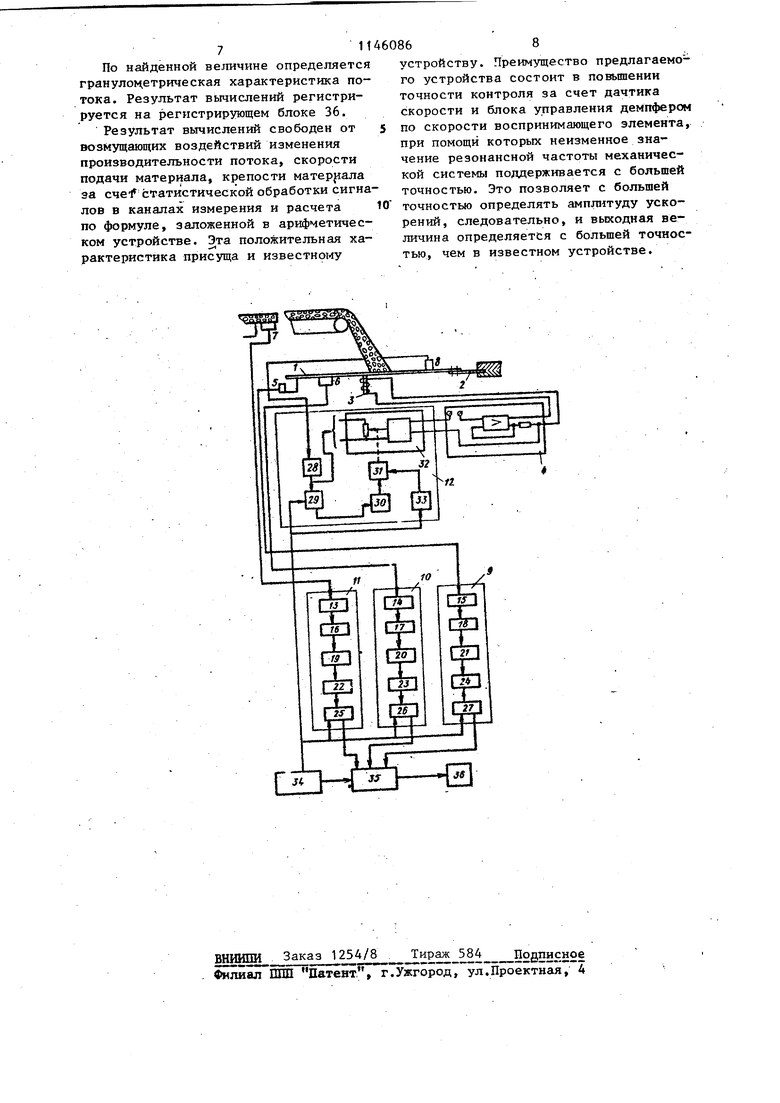
Изобретение относится к измерению гранулометрическрго состава потока промьшленного сырья и может быть применено для контроля крупности дробленой железной руды в потоке на перегрузке конвейеров дробильной фаб рики, на конвейере обогатительной фабрики горно-обогатительного предприятия, для контроля крупности пита ния мельниц самоизмельчения йселезной руды, для контроля крупности дробленых нерудных материалов на предприятиях промышленности стройматериалов при наличии участка свободного падения потока материала, а также может использоваться как в составе АСУ ТП предприятия, так и автономно, для оперативного контроля. Известно устройство для автоматического контроля средней крупности потока сыпучего материала, в котором воспринимающий элемент выпoлнe f в вгзде виброизолированной балки, имеющей вибродатчик, подключенный на входы двух избирательных усилителей, настроенных на две соседние резонанс ные частоты колебаний воспринимающего органа, а выходы избирательных усилителей подключены к блоку сравнения, выход которого соединен с регистрирующим прибором. Однако контроль крупности с помощью этого устройства имеет погрешность за счет того, что сигнал вибро датчика, стохастический по природе, анализируется как детерминированный. Возмущающее воздействие на сигнал вибродатчика оказывают изменения производительности потрка, физикомеханиче ск.их свойств контролируемого материала (крепости), скорости подачи материала. Наиболее близким к изобретению ,по технической сущности является уст ройство контроля крупности еьтучих материалов в потоке, содержащее воспринимающий элемент в виде колеблющейся механической системы с упругой пластиной и электромагнитным демпфером с управляемым блоком питания, вибропреобразователь, преобразователь статического перемещения воспри нимающего элемента, датчик массы пот ка, три блока обработки сигналов, таймер и арифметический блок, соединенный с блоком регистрации. Однако в известном устройстве ком пенсация влияющих воздействий производительности потока, скорости подачи материала и крепости материала , происходит при обработке сигналов датчиков, в результате которой вычисляется величина, пропорциональная произведению среднего значения мощности потока на квадрат частного от деления среднего значения амплитуды ускорений на среднее значение статического перемещения воспринимающего элемента, Найденная величина однозначно определяет гранулометрическую характеристику потока при условии поддержания резонансной частоты колебаний воспринимающего элемента постоянной, что предполагалось достигать при помощи элемента сравнения. В этом элементе происходит сравнение частоты, соответствующей экстремуму амплитудно-частотной характеристики сигнала вибропреобразователя с опорной (меньшей разонансной) частотой, результат сравнения преобразуется управляемым блоком питания в ток электромагнитного демпфера, т.е. изменяя демпфирование механической системы, поддерживают заданное значение резонансной частоты. Кроме того, известное устройство также не может обеспечить повыпение точности измерения из-за потери информации в цепи элемента сравнения: при установке вибропреобразователя на тонкой переходной пластине обнаружргаается изменение амплитудно-частотной характеристики, сигнала вибропреобразователя. Амплитуды составояющих сигнала, содержащих информацию о резонансной частоте механической системы, малы по сравнению с амплитудами составляющих, содержащих информацию о резонансной частоте переходной пластины, вследствие чего становится невозможно по сигналу вибропреобразователя судить об изменениях демпфирования механической системы, что и приводит к потерям точности измерения. Цель изобретения - повышешие точности контроля. Эта цель достигается тем, что устройство для контроля крзттности еьтучих материалов в потоке, содержащее воспринимающий элемент в виде колеблющейся механической системы с упругой пластиной и электромагнитньм демпфером с управляемым блоком питания, вибропреобразователь, преобразователь статического перемещения воспринимающего элемента, датчик массы потока, три блока обработ ки сигналов, таймер и арифметический блок, соединенный с блоком регистрации, снабжено датчиком скорос ти воспринимающего элемента и блоком управления демпфером по скорости воспринимающего элемента, вьшолненным в виде предварительного усилителя, управляемого интегратора, узкополосового фильтра, экстремумрегулятора, управляемого усилителя и элемента установки экстремум-регулятора в начальное положение, при чем выход предварительного усилител соединен с входом управляемого.усилителя и первым входом управляемого .интегратора, выход управляемого интегратора соединен через узкополосо вой фильтр с первым входом экстремум-регулятора, с вторым входом которого соединен выход элемента уста новки экстремум-регулятора в началь ное положение, выход управляемого усилителя соединен с входом управляемого блока питания, вибропреобра зователь, преобразователь статическ го перемещения воспринимающего элемента и датчик массы потока через соответствующие блоки обработки сиг налов соединены с первым, вторьм и третьим входами арифметического бло ка, четвертый вход которого подключен к первому выходу таймера, второ выход таймера соединен с соответствующими входами блоков обработки сигналов, с вторым входом управляем го интегратора и с входом элемента установки экстремум-регулятора в начальное положение. На чертеже приведена блок-схема устройства. Основу устройства контроля крупности сыпучих материалов составляет воспринимающий элемент, представляющий собой колеблущуюся механическую, .систему, состоящую из приемника 1, упругой пластины (пружины) 2 и элект ромагнитного демпфера 3 с управляемын блоком 4 питания. Устройство имеет вибропреобразователь 5 на тонкой переходной пластине, преобразователь 6 статического перемещения воспринимающего элем1-нта, датчик 7 массы потока и индукционный датчик 8 скорости воспринимающего элемента. Кроме того, устройство содержит три блока обработки сигналов: измерения среднего значения амплитуды ускорений 9, измерения среднего значения перемещения воспринимающего элемента 10, измерения среднего значения массы потока 11, а также блок 12 управления демпфером по скорости воспринимающего элемента. Каждый из каналов измерения включает в себя предварительный усилитель 13-15, фильтр 16-18 помех, усилитель 19-21, детектор-преобразователь 22-24 и усредняющий интегратор 25-27. Блок управления демпфером включает в себя предварительный усилитель 28, управляемый интегратор 29, узкополосовой фильтр 30, настроенный на резонансную частоту колебаний воспринимающего элемента, экстремум-регулятор 31 сигнала узкополосового фильтра, управляем й усилитель 32 с регулятором коэффициента усиления и элемент 33 установки экстремум-регулятора в начальное положение.. Выход индукционного датчика 8 скорости через предварительный усилитель 28 соединен с входами управляемого усилителя 32 с регулятором коэффициента усиления и управляемого интегратора 29, выход интегратора 29 с входом узкополосового фильтра 30, выход фильтра 30 - с входом экстремум-регулятора 31, выход элемента 33 установки экстремум-регулятора в начальное положение - с установочным входом экстремум-регулятора 31, выход экстремум-регулятора 31 с регулятором коэффициента усиления управляемого усилителя 32 i а управляемого усилителя 32 - с входом блока 4 питания демпфера. Устройство также включает в себя таймер 34, арифметический 6J.OK 35 и регистрирующий блок 36. Таймер 34 связан с управляемыми входами интеграторов 25-29, элементом 33 установки экстремум-регулятора в начальное положение и арифметическим блоком 35. Устройство работает следующим образом. Контроль крупности сыпучего материала осуществляется в потоке падаю-.. щего материала, для чего помещают в поток приемники 1 воспринимающего элемента. Б первичных измерителях 5-7 устройства вырабатьшаются сигналы, пропорциональные соответственно ускорению колебаний воспринимающего элемента в потоке материала, статическому перемещению воспринимающего элемента и массе контролируемого потока. Каждатй из этих сигналов в отдельном канале измерения в общем случае преобразуется в следующей последовательности: предварительное усиление и передача по кабелю, фильт рация промышленных помех, усиление, детектирование и усреднение (интегрирование). Эти операции выполняются в следующих блоках и узлах каждого канала измерения; предварительных 28-и 13-15, фильтрах 16-18 помех, усилителях 19-21, детекторахпреобразователях и усредняющих интеграторах 25-27, В детекторах-преобразователях 2224 сигнал, помимо детектирования, преобразуется в унифицированный (аналоговьй или код) удобньй для дальнейшего интегрирования вид. В первичном измерителе 8 вьфаба- тывается сигнал, пропорциональный скорости колебаний воспринимаемого элемента. Этот сигнал преобразуется в блоке 12 управления демпфером по скорости воспринимающего элемента следующим образом: после усиления предварительным усилителем 28 сигнал поступает на вход управляемого усилителя 32 с регулятором коэффициента усиления, выходной сигнал .усилителя 32 подается на управляющий (ВХОД блока 4 питания электромагнитного демпфера в фазе, обеспечивающей увеличение тока электромагнитного демпфера 3 при удалении из него дечника и наоборот, тем самьвд образу ется цепь обратной связи, обеспечива ющая вве,ение дополнительного демпфирования в систему. Выходной сигнал предзарительного усилителя 28 также поступает на вход управляемого интег ратора 29, -преобразующего сигнал в аналоговьй, пропорциональный амплиту де колебаний воспринимающего элемента и поступающий на вход узкополосового фильтра 30, настроенного на резонансную частоту колебаний воспринимающего элемента, выходной сигнал узпополосового фильтра 30 поступает ; на вход экстремум-регулятора 31, выход которого соединен с регулятором коэффициента усиления управляемого усилителя 32. Экстремум-регулятор 31, 1 серции, на элемент 33 установки - сигнал запуска для перевода, экстремум-регулятора 31 в начальное положение. 66 воздействуя на кбэффициент усиления, устанавливает глубину обратной связи, обеспечивающую максимальный выходной сигнал узкополосового фильтра 30,-. т.е. неизменную резонансную частоту воспринимающего элемента. Управление работой интегратора 2527 и 29, элемента 33 установки экстремум-регулятора в начальное положение и арифметического блока 35 осуществляется таймером 34, в котором формируются заправляющие сигналы запуска, остановки и сброса результатов. Цикл измерения в устройстве начинается с подачи сигналов с таймера 34 на интеграторы 10 и 11 ка;налов, в которых осуществляется интегрирование сигналов, пропорциональных статическому перемещению воспринимающего элемента и массе потока. Интегри- . рование заканчивается при подаче на интеграторы 10 и 11 каналов сигнала остановки, приводящего интеграторы в режим запоминания, после чего выдается запускающий сигнал на интегратор 29, выходной сигнал которого поступает на узкополосовый фильтр 30, а сигнал с фильтра - на экстремумрегулятор 31, который в начале каждого цикла измерения находится в начальном положении, соответствующем наименьшему демпфированию. Через время, достаточное для перехода процесса колебаний в установившееся состояние , по демпфированию с таймера 34 подается сигнал запуска на интегратор 9 канала, в котором осуществляется интегрирование сигйала, пропорционального ускорениям колебаний. Интегрирование заканчивается при подаче на интегратор 9 канала сигнала остановки, приводящего интегратор в режим запоминания, после чего выдается запускающий сигнал на (тический блок 35. В арифметическом блоке 35 вычисляется величина, пропорциональная произведению среднего значения мощности потока на квадрат частного от деления среднего значения амплитуды уск эрений на среднее значение статического перемещения воспринимающего,элемента. Через время, достаточное для осуществления вычисления, с таймера 34 подается сигнал на за- , поминание полувоенного результата, на интеграторы - сигнал сброса информаПо найденной величине определяется гранулометрическая характеристика потока. Результат вычислений регистрируется на регистрирующем блоке 36.
Результат вычислений свободен от возмущающих воздействий изменения производительности потока, скорости подачи материала, крепости материала за C4ef статистической обработки сигналов в каналах измерения и расчета по формуле, заложенной в арифметическом устройстве. Эта положительная характеристика присуща и известному
устройству. Преимущество предлагаемого устройства состоит в повьшении точности контроля за счет дачтика скорости и блока управления демпфером по скорости воспринимающего элемента, при помощи которых неизменное значение резонансной частоты механической системы поддерживается с большей точностью. Это позволяет с большей точностью определять амплитуду ускорений, следовательно, и выходная величина определяется с большей точностью, чем в известном устройстве.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля положения исполнительного органа горной машины в профиле пласта | 1982 |
|
SU1040142A1 |
| Система автоматического управления установкой циркуляционного вакуумирования стали | 1984 |
|
SU1199806A1 |
| Устройство для контроля крупности сыпучих материалов | 1982 |
|
SU1069856A1 |
| Система регулирования загрузки измельчительного агрегата | 1983 |
|
SU1146085A1 |
| Частотно-регулируемый электропривод переменного тока | 1985 |
|
SU1292157A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Система автоматического управления циклом измельчения | 1983 |
|
SU1357072A1 |
| Устройство для диагностики роторных опор | 1986 |
|
SU1361465A1 |
| Устройство контроля крупности дробленой руды | 1986 |
|
SU1395366A1 |
| Устройство контроля положения исполнительного органа горной машины в профиле пласта | 1982 |
|
SU1051268A1 |
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КРУПНОСТИ СЫПУЧИХ МАТЕРИАЛОВ в ПОТОКЕ, содержащее воспринимающий элемент в виде колеблющейся механической системы с упругой пластиной и электромагнитным демпфером с управляемым блокрм питания, вибропре- образователь, преобразователь статического перемещения воспринимающего элемента, датчик массы потока, три блока обработки сигналов, таймер и арифметический блок,соединенньш с блоком регистрации, о т л и ч а ющ ее с я тем, что, с целью повышения точности контроля, оно снабжено датчиком скорости воспринимающего элемента и блоком управления демпфером по скорости воспринимающего элемента, выполненньм в виде предварительного усилителя, з равляемого интегратора, узкополосового фипьтра, экстремум-регулятора, управляемого усилителя и элемента установки . экстремум-регулятора в начальное положение, причем выход предварительного усилителя соединен с входом управляемого усилителя и первым вхо- дом управляемого интегратора, выход управляемого интегратора соединен ,через узкополосовой фильтр с первым входом экстремум-регулятора, с вторым входом которого соединен выход элемента установки экстремум-регулятора в начальное положение, выход управляемого усилителя соединен с входом управляемого блока питания, вибропреобразователь, преобразова(Л тель статического перемещения воспринимающего элемента и датчик массы потока через соответствующие блоки обработки сигналов, соединены с первьы, вторым и третьим входами арифметического блока, четвертый вход которого подключен к первому выходу Ф таймера, второй выход таймера соедиРд нен с соответствзтощими входами блоков обработки сигналов, с вторым 00 Од входом управляемого шэт-егратора и с входом элемента установки экстремумрегулятора в начальное положение.