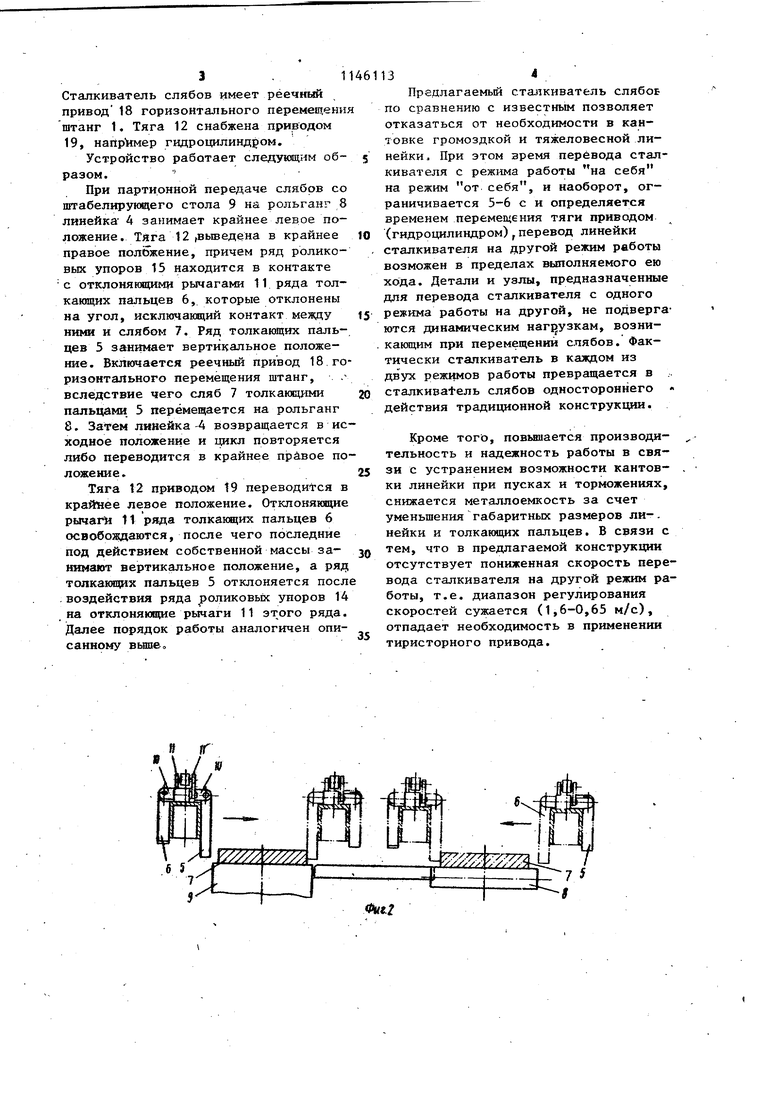
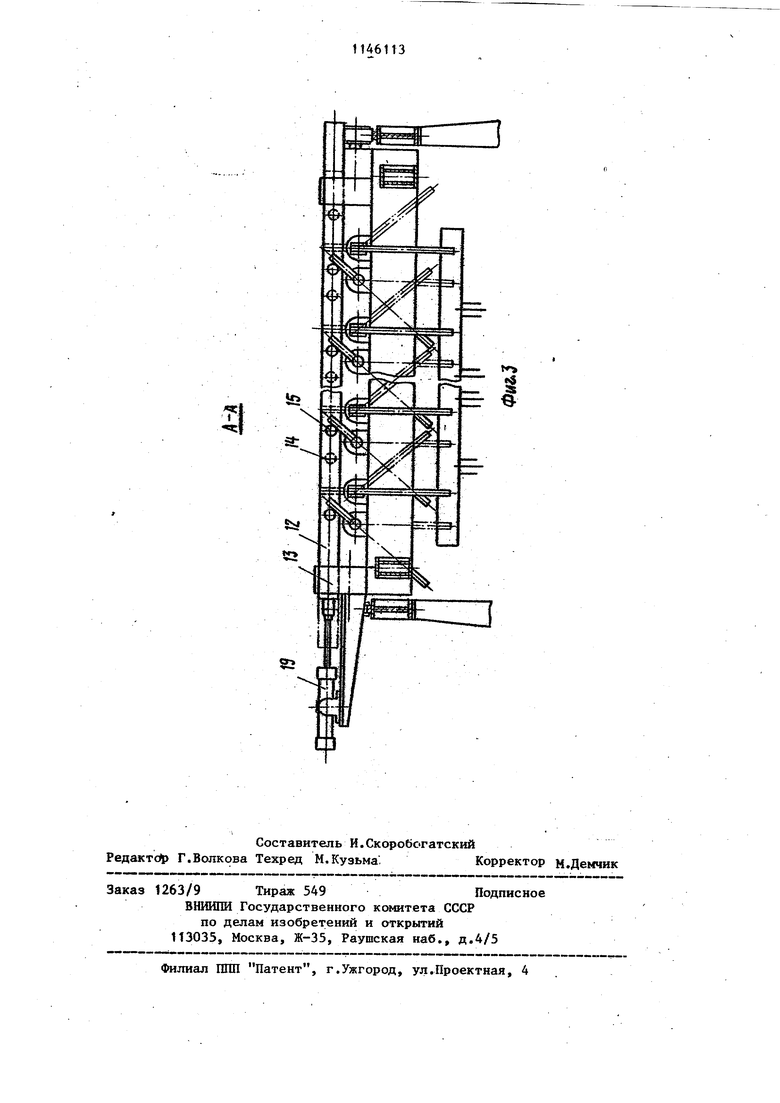
1 Изобретение относится к металлургической промьштенности, в частноети к оборудованию прокатных станЬв, и может бьггь использовано на участках транспортирования слябов со слябйнга на склад или со склада на широкополосный стан горячей прокатки. По основному авт.св. № 1060265 известен сталкиватель слябов, содержащий штанги, С14онтированные в корпусах с ВОЗНОЖНОСТ1Л) горизонтального перемещения «а направляющих качения, реечный йривод перемещения штанг, ко торые соединены «еаду собой линейкой по краям рпиракщейся черюэ кодовые колеса на б«говме дорожки, устайовленные на линейке в вертикальной плоскости в ряд толкающие пальцы, взаимодействуиндае со слябами в щ оцессе их передачи, при этом линейка снабжена дополнительным рядом толкающих пальцев, которые установлены в горизонтальной плоскости, и выполнена с возможноетью поворота вокруг го ризонтальной оси на угол 90, а механизм поворота линейки выполнен в виде вьщвижного упора, установленного на ста щонарной опоре, и двухролйкового кантукяцего рычага, жестко закрепленного на линейке с возможностью взаимодействия с приводом сталкивателя ft. В связи с тем, что сталкиватель слябов производит челночную передачу слябов со штабелирующего стола на рольганг и с рольганга на штабелирую щий стол, необходимо кантовать тяжеловесную линейку с толкакядими пальца ми массой более 10 т. Эту технологическую операцию необходимо производить на пониженной скорости. Время кантовки цри скорости 50 мм/с состав ляет около одной минуты, а перевод режима работы возможен только в зоне вцдвижного упора, при этом для надеж ной работы сталкивателя требуется снижать ускорение, потому что линейка в исходных положениях удерживается за счет смещения центра масс чик органов, а при пусках и торможениях возможно ее опрокидьюание под действием сил инерхщи. Это отрицател но сказывается на производительности а широкий диапазон регулирования ско ростей (1,6-0,05 м/с) требует применения тиристорного привода, что удорожает конструкцию. Кроме того, конструкция сталкивателя сложн, металлоемка, наличие 3i .. упоров и шарнирных соединений линейки со штсгпмн, зосприниг ающих значительные ударные нагрузки, требуют для повышения надежности и долговечности устройства увеличения запаса, прочности, что влечет за собой расход металла, увеличения массы устройства и не всегда гарантирует требуе €ую эксплуатационную надежность. Целью изобретения является повышение надежности и быстродействия устройства путем сокращения времени кантования толкающих пальцев. Поставленная цель достигается тем, что в сталкивателе слябов линейка снабжен тягой, связанной с приводом ее возвратно-поступательного перемещения относительно линейки, тяги и привод смонтированы наопорах линейки, причем тяга снабжена расположенными по обе ее стороны рядами роликовых упоров, а концы вилок толкающих пальцев - cooтвeтcтвyкнt и в им рядами отклоняклдих рычагов. На фиг.1 изображена кинематическая схема сталкивателя, вид в плане; на, фиг,2 - схема работы сталкивателя на себя и от на фиг.З. разрез А-А на фиг.1. Сталкиватель слябов состоит из двух штанг. 1, смонтированных в корпусах 2 на направляющих 3 качения, жестко соединенной со штангами t линейки 4, содержащей два ряда толкающих пальцев 5 и б, расположенных по обе стороны линейки параллельно друг к другу и взаимодействукядих в зависимости от направления сталкивания со слябом 7, находящимся либо на рольганге 8, либо на штабелирующем столе 9. На концах вилок 10 толкакяцих пальцев 5 и 6 жестко закреплены отклоняющие рычаги 1t. Линейка снабжена тягой 12, установленной в опорах 13, йа тяге 12 закреплены два ряда роликовых упоров 14 и 15, причем в зависимости от направления сталкивания сляба 7 один из рядов роликовых упоров 14 и 15 находится в постоянном контакте с отклоняюощми рычагами 11 одного из рядов толкающих пальцев 5 и 7, Роликовые упоры 14 и 15 закреплены на тяге 12 так, что в случае бокового удара сляба 7 по толкакшщм пальцам 5 и 6 они находятся вне зоны траектории движения отклоняющих рычагов 11. На концах линейки 4 в опорах 1-3 закреплены ходовые колеса 16, которые опираются ка беговые дорожки 17, 3 . 11 Сталкиватель слябов имеет реечный , привод 18 горизонтального перемещения штанг 1. Тяга 12 снабжена приводом 19, например гидроцилиндром. Устройство работает следующим образом. При партионной передаче слябов со штабелирующего стола 9 на рольганг 8 линейка 4 занимает крайнее левое положение. Тяга 12 ,выведена в крайнее правое положение, причем ряд роликовых упоров 15 находится в контакте с отклоняющими рычагами 11 ряда толкающих пальцев 6, которые отклонены на угол, исключающий контакт меяду ними и слябом 7. Ряд толкающих паль-, цев 5 занимает вертикальное положение. Включается реечный привод 18 горизонтального перемещения штанг, вследствие чего сляб 7 толкакидими пальцами. 5 перемещается на рольганг 8. Затем линейка 4 возвращается в исходное положение и цикл повторяется либо переводится в крайнее правое по ложение. Тяга 12 приводом 19 переводится в Kpaibiee левое положение. Отклоняющие рычаги t1 ряда толкающих пальцев 6 освобоящаются, после чего последние под действием собственной массы занимают вертикальное положение, а ряд толкающих пальцев 5 отклоняется посл .воздействия ряда роликовьй упоров 14 на отклоняющие рьтчаги 11 этого ряда. Далее порядок работы аналогичен описанному вьшво 3 . Предлагаемый сталкиватель слябов по сравнению с известным позволяет отказаться от необходимости в кантовке громоздкой и тяжеловесной линейки. При зтом время перевода сталкивателя с режима работы на себя на режим от себя, и наоборот, ограничивается 5-6 с и определяется временем перемещения тяги приводом (гидроцилиндром),перевод линейки сталкивателя на другой режим работы возможен в пределах выполняемого ею хода. Детали и узлы, предназначенные для перевода сталкивателя с одного режима работы на другой, не подвергаются динамическим нагрузкам, возникакнцим при перемещении слябов. Фактически Сталкиватель в каждом из двух режимов работы превращается в сталкиваФель слябов одностороннего действия традиционной конструкции. Кроме того, повмиается производительность и надежность работы в связи с устранением возможности кантовки линейки при пусках и торможениях, снижается металлоемкость за счет уменьшения габаритных размеров ли-, нейки и толкающих пальцев. В связи с тем, что в предлагаемой конструкции отсутствует пониженная скорость перевода сталкивателя на другой режим работы, т.е. диапазон регулирования скоростей сужается (1,6-0,65 м/с), отпадает необходимость в применении тиристорного привода.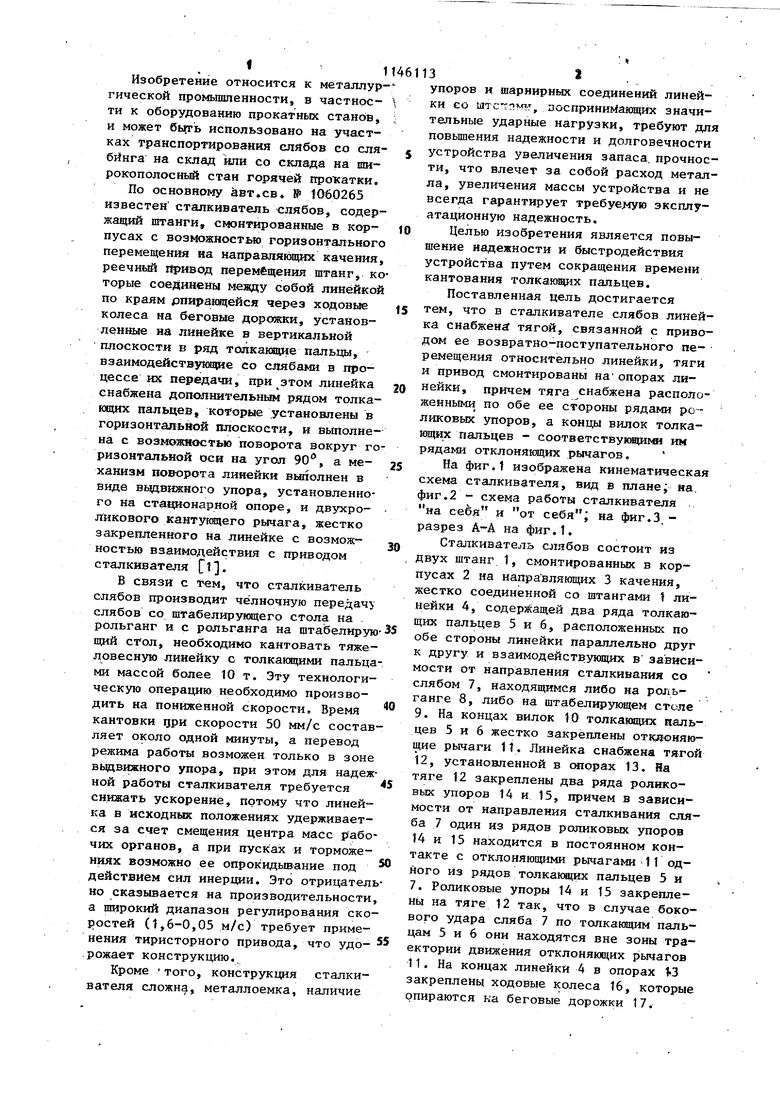
| название | год | авторы | номер документа |
|---|---|---|---|
| Сталкиватель слябов | 1982 |
|
SU1060265A1 |
| Устройство для штабелирования прямоугольных заготовок,преимущественно, слябов | 1973 |
|
SU499195A1 |
| Сталкиватель слябов | 1991 |
|
SU1766548A1 |
| ЗАЧИСТКИ СЛЯБОВM^.-JV!«-^ -.• | 1971 |
|
SU304023A1 |
| Устройство для штабелирования прямоугольных заготовок | 1980 |
|
SU1036641A1 |
| Устройство для уборки заготовок | 1980 |
|
SU963587A1 |
| СТАЛКИВАТЕЛЬ ПРОКАТА | 1969 |
|
SU257414A1 |
| Кантователь | 1986 |
|
SU1389895A2 |
| УСТРОЙСТВО ДЛЯ РАЗБОРКИ ПАКЕТОВ ДЛИННОМЕРНЫХ ИЗДЕЛИЙ | 1991 |
|
RU2043286C1 |
| Устройство для штабелирования прямоугольных заготовок | 1980 |
|
SU1044568A2 |
te
t
Т
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сталкиватель слябов | 1982 |
|
SU1060265A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
