2. Сталкиватель по п. 1, отличающийся тем, что механизм поворота линейки выполнен в виде выдвижного упора, установленного
на стационарной опоре, и двухроликового кантующего рычага, жестко закрепленного на линейке с возможностью взаимодействия с приводом сталкивателя.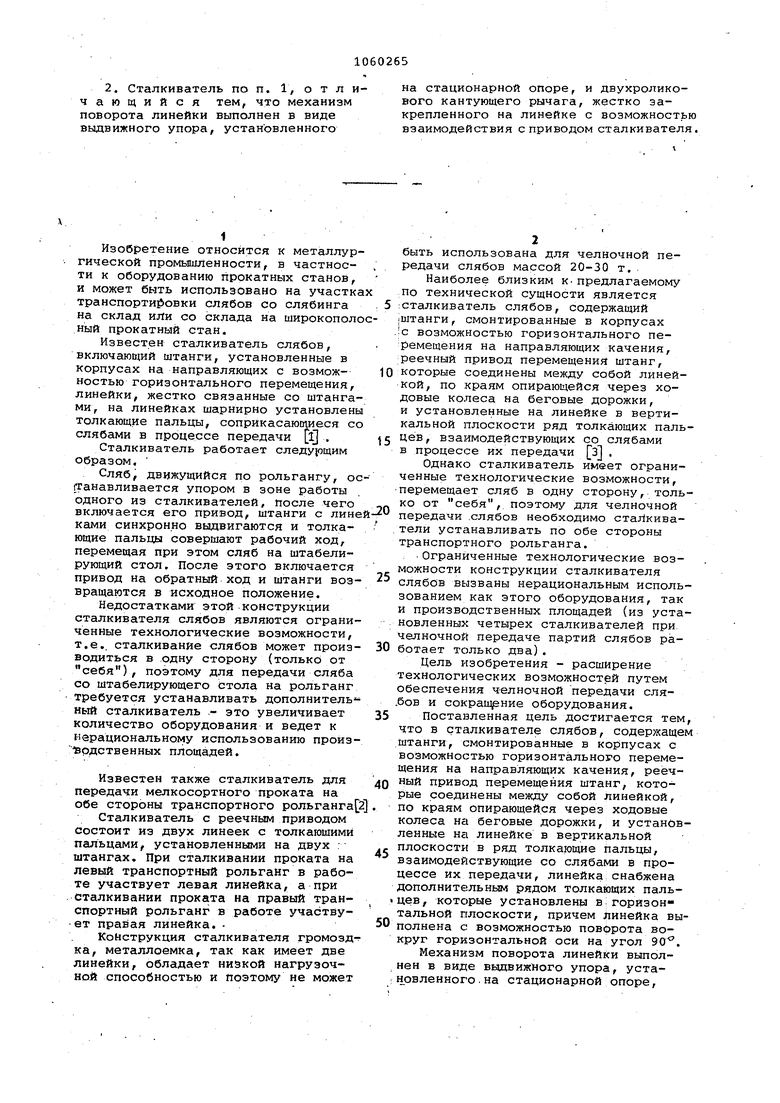
| название | год | авторы | номер документа |
|---|---|---|---|
| Сталкиватель слябов | 1984 |
|
SU1146113A1 |
| Устройство для штабелирования прямоугольных заготовок,преимущественно, слябов | 1973 |
|
SU499195A1 |
| СТАЛКИВАТЕЛЬ ПРОКАТА | 1969 |
|
SU257414A1 |
| Сталкиватель обрези к гильотинным ножницам | 1980 |
|
SU912416A1 |
| Устройство для послойной укладки изделий в пакет | 1988 |
|
SU1572954A1 |
| Устройство для штабелирования прямоугольных заготовок | 1980 |
|
SU1036641A1 |
| Устройство для уборки заготовок | 1980 |
|
SU963587A1 |
| САМОХОДНАЯ МАШИНА ДЛЯ ЗАГРУЗКИ ТРАНСПОРТНЫХ | 1974 |
|
SU372895A1 |
| Установка для укладки строительных из-дЕлий B КОНТЕйНЕРы | 1979 |
|
SU850398A1 |
| Устройство для уборки проката с рольгангов прокатных станов | 1960 |
|
SU136295A1 |

1. СТАЛКИВАТЕЛЬ СЛЯБОВ, содержащий штанги, смонтированные в а , , е корпусах с возможностью горизонтальiHoro перемещения на направляющих качения, реечный привод перемещения штанг, которые соединены между собой линейкой, по краям опирающейся через ходовые колеса на беговые дорожки, и установленные на линейке в вертикальной плоскости в ряд толкающие пальцы, взаимодействующие со слябами в процессе .их передачи, отличающийся тем, что, с целью расширения технологических возможностей путем обеспечения челночной передачи слябов и сокращения оборудования, линейка снабжена дополнительным рядом толкающих пальцев, которые установлены в горизонтальной плоскости, причем линейка выполнена (Л С возможность поворота вокруг горизонтальной оси на угол 90°.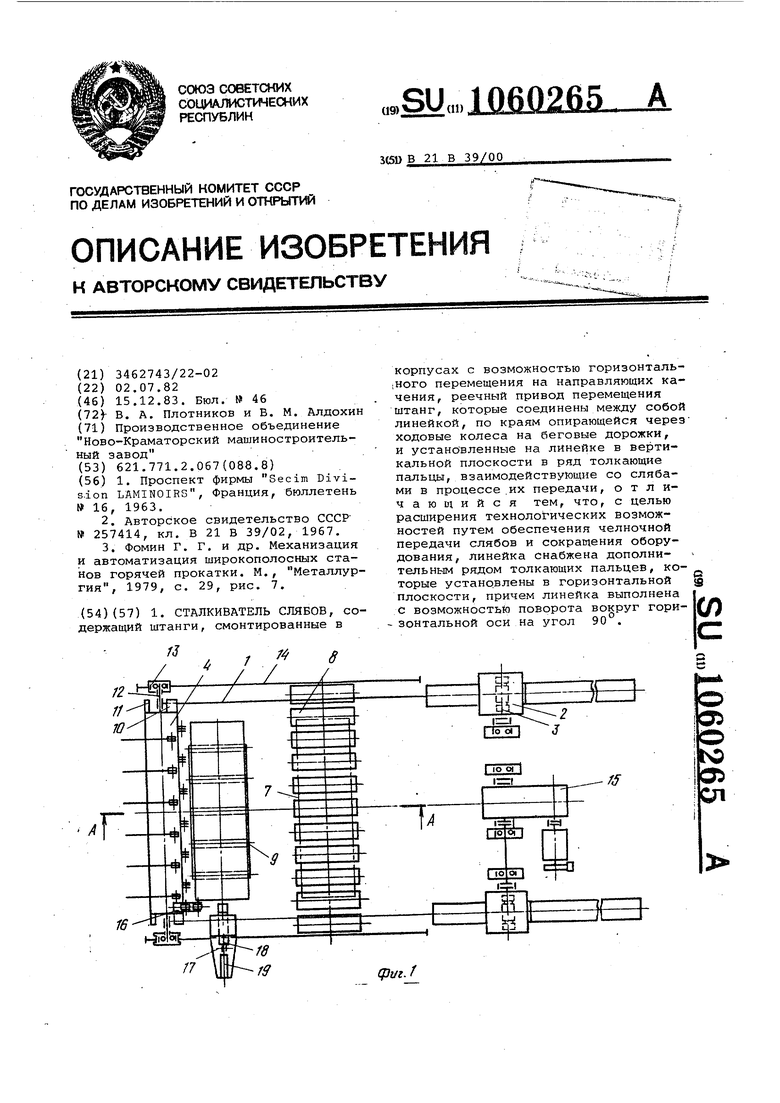
Изобретение относится к металлургической промышленности, в частности к оборудованию прокатных станов, и может быть использовано на участка транспортировки слябов со слябинга на склад или со склада на широкополоный прокатный стан.
Известен сталкиватель слябов, включающий штанги, установленные в корпусах на направляющих с возможностью горизонтального перемещения, линейки, жестко связанные со штангами, на линейках шарнирно установлены толкающие пальцы, соприкасающиеся со слябами в процессе передачи l .
Сталкиватель работает следурэщим образом.
Сляб, движущийся по рольгангу, останавливается упором в зоне работы одного из сталкивателей, после чего включается его привод, штанги с лине ками синхронно выдвигаются и толкающие пальцы совершают рабочий ход, перемещая при этом сляб на штабелирующий стол. После этого включается привод на обратный ход и штанги возвращаются в исходное положение.
Недостатками этой конструкции сталкивателя слябов являются ограниченные технологические возможности, т.е.. сталкивание слябов может производиться в одну сторону (только от себя), поэтому для передачи сляба со штабелирующего стола на рольганг требуется устанавливать дополнитель ный сталкиватель .- это увеличивает количество оборудования и ведет к нерациональному использованию произ Врдственных площадей.
Известен также сталкиватель для передачи мелкосортного проката на обе стороны транспортного рольганга
Сталкиватель с реечным приводом состоит из двух линеек с толкающими пальцами, установленными на двух : штангах. При сталкивании проката на левый транспортный рольганг в работе участвует левая линейка, а при сталкивании проката на правый транспортный рольганг в работе участвует правая линейка.
Конструкция сталкивателя громоздка, металлоемка, так как имеет две линейки, обладает низкой нагрузочной способностью и поэтому не может
быть использована для челночной передачи слябов массой 20-30 т..
Наиболее близким к- предлагаемому по технической сущности является :сталкиватель слябов, содержащий штанги, смонтированные в корпусах 1с возможностью горизонтального пе ремещения на направляющих качения, реечный привод перемещения штанг, которые соединены между собой линейкой, по краям опирающейся через ходовые колеса на беговые дорожки, и установленные на линейке в вертикальной плоскости ряд толкающих пальцев , взаимодействующих со слябами в процессе их передачи з ,
Однако сталкиватель имеет ограниченные технологические возможности, перемещает сляб в одну сторону, только от себя, поэтому для челночной передачи .слябов необходимо стах(киватели устанавливать по обе стороны транспортного рольганга.
.Ограниченные технологические возможности конструкции сталкивателя слябов вызваны нерациональным использованием как этого оборудования, так и производственных площадей (из установленных четырех сталкивателей при челночной передаче партий слябов работает только два).
Цель изобретения - расширение технологических возможностей путем обеспечения челночной передачи сля.бов и сокращение оборудования.
Поставленная цель достигается тем что в сталкивателе слябов, содержаще штанги, смонтированные в корпусах с возможностью горизонтального перемещения на направляющих качения, реечный привод перемещения штанг, которые соединены между собой линейкой, по краям опирающейся через ходовые колеса на беговые дорожки, и установленные Hci линейке в вертикальной плоскости в ряд толкающие пальцы, взаимодействующие со слябами в процессе их передачи, линейка снабжена дополнительным рядом толкающих пальцев, которые установлены в горизонтальной плоскости, причем линейка выполнена с возможностью поворота вокруг горизонтальной оси на угол 90.
Механизм поворота линейки выполнен в виде выдвижного упора, установленного . на стационарной опоре.
и двукроликового кантующего рычага, жестко закрепленного на линейке с возможностью взаимодействия с приводом сталкивателя.
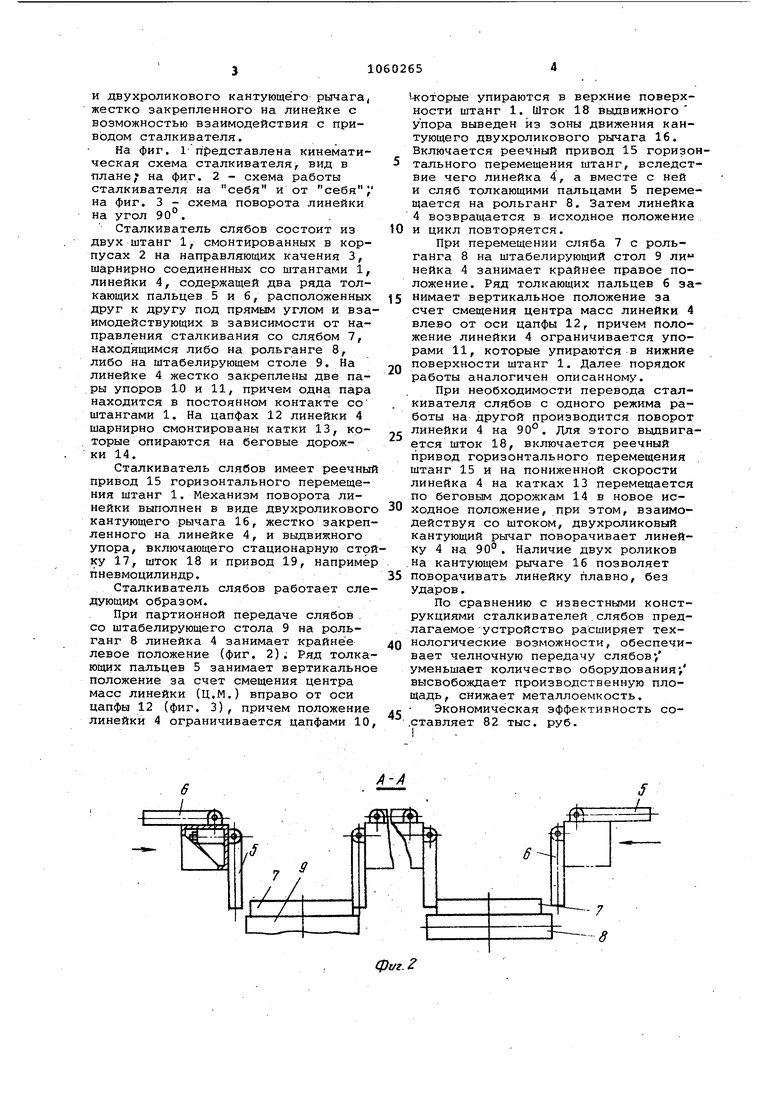
На фиг. 1- гг)едставлена кинематическая схема сталкивателя, вид в плане; на фиг. 2 - схема работы сталкивателя на себя и от себя J на фиг. 3 - схема поворота линейки на угол 90°.
Сталкиватель слябов состоит из двух штанг 1, смонтированных в корпусах 2 на направляющих качения 3, шарнирно соединенных со щтангами 1, линейки 4, содержащей два ряда толкающих пальцев 5 и 6, расположенных друг к другу под прямым углом и взаимодействующих в зависимости от направления сталкивания со слябом 7, находящимся либо на рольганге 8, либо на Штабелирующем столе 9. На линейке 4 жестко закреплены две пары упоров 1.0 и 11, причем одна пара находится в постоянном контакте со штангами 1. На цапфах 12 линейки 4 шарнирно смонтированы катки 13, которые опираются на беговые дорожки 14.
Сталкиватель слябов имеет реечный привод 15 горизонтального перемещения штанг 1. Механизм поворота линейки выполнен в виде Двухроликового кантующего рычага 16, жестко закрепленного на линейке 4, и выдвижного упора, включающего стационарную стойку 17, шток 18 и привод 19, например пневмоцилиндр.
Сталкиватель слябов работает следующим образом.
При партионной передаче слябов . со штабелирующего стола 9 на рольганг 8 линейка 4 занимает крайнее евое положение (фиг. 2). Ряд толкащих пальцев 5 занимает вертикальное положение за счет смещения центра асс линейки (Ц.М.) вправо от оси апфы 12 (фиг. 3), причем положение инейки 4 ограничивается цапфами 10,
-которые упираются в верхние поверхности штанг 1. Шток 18 выдвижного упора выведен из зоны движения кантующего Двухроликового рычага 16. Включается реечный привод 15 гориэон5 тального перемещения штанг, вследствие чего линейка 4, а вместе с ней и сляб толкающими пальцами 5 перемещается на рольганг 8. Затем линейка 4 возвращается в исходное положение 0 и цикл повторяется.
При перемещении сляба 7 с рольганга 8 на штабелирующий стол 9 ли нейка 4 занимает крайнее правое положение. Ряд толкающих пальцев 6 за5 нимает вертикальное положение за счет смещения центра масс линейки 4 влево от оси цапфы 12, причем положение линейки 4 ограничивается упорами 11, которые упираются в нижние поверхности штанг 1. Далее порядок работы аналогичен описанному.
При необходимости перевода сталкивателя слябов с одного режима работы на другой производится поворот 5 линейки 4 на 90°. Для этого выдвигается шток 18, включается реечный привод горизонтального перемещения штанг 15 и на пониженной скорости линейка 4 на катках 13 перемещается по беговым дорожкам 14 в новое исходное положение, при этом, взаимодействуя со штоком, двухроликовый кантующий рычаг поворачивает линейку 4 на 90°. Наличие двух роликов .На кантующем рычаге 16 позволяет 5 поворачивать линейку плавно, без Ударов.
По сравнению с известными конструкциями сталкивателей слябов предлагаемое -устройство расширяет технологические возможности, обеспечивает челночную передачу слябов/ уменьшает количество оборудования; высвобождает производственную площадь, снижает металлоемкость.
Экономическая эффективность со.ставляет 82 тыс. руб.
-/
/ /
rj Ji /
1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Проспект фирмы Secim Divis.ion LAMINOIRS, Франция, бюллетень № 16, 1963 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Г | |||
| и др | |||
| Механизация и автоматизация широкополосных станов горячей прокатки | |||
| М., Металлургия, 1979, с | |||
| Солесос | 1922 |
|
SU29A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
