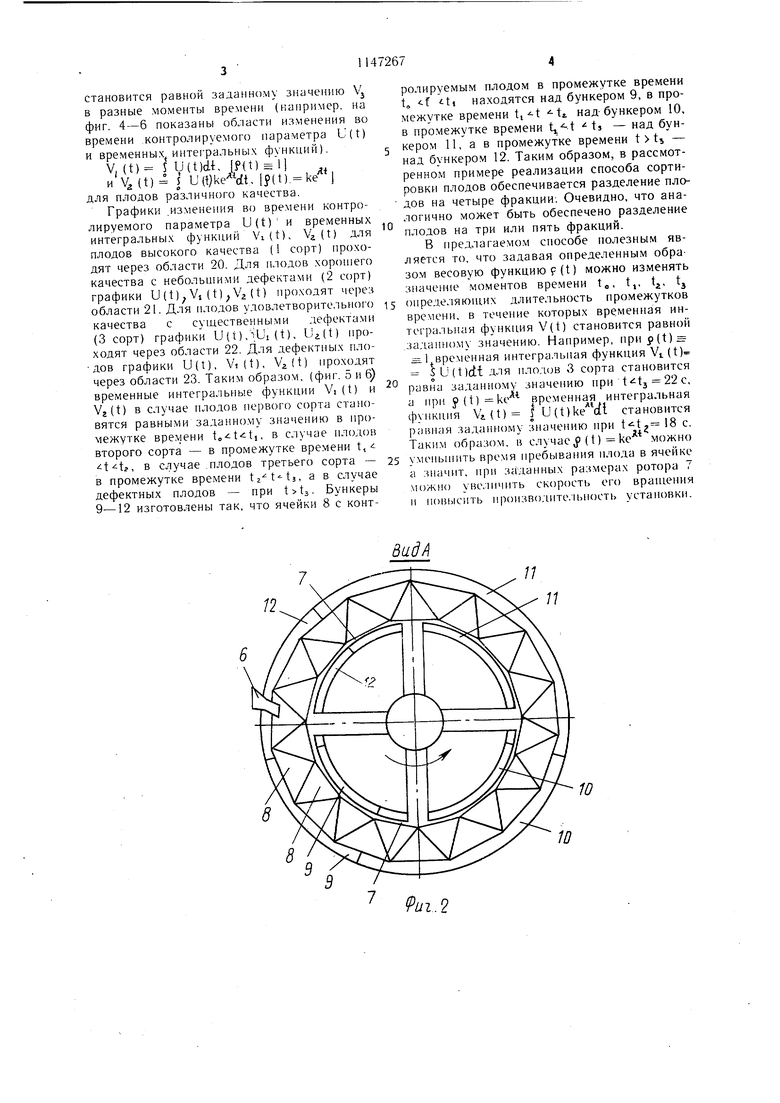
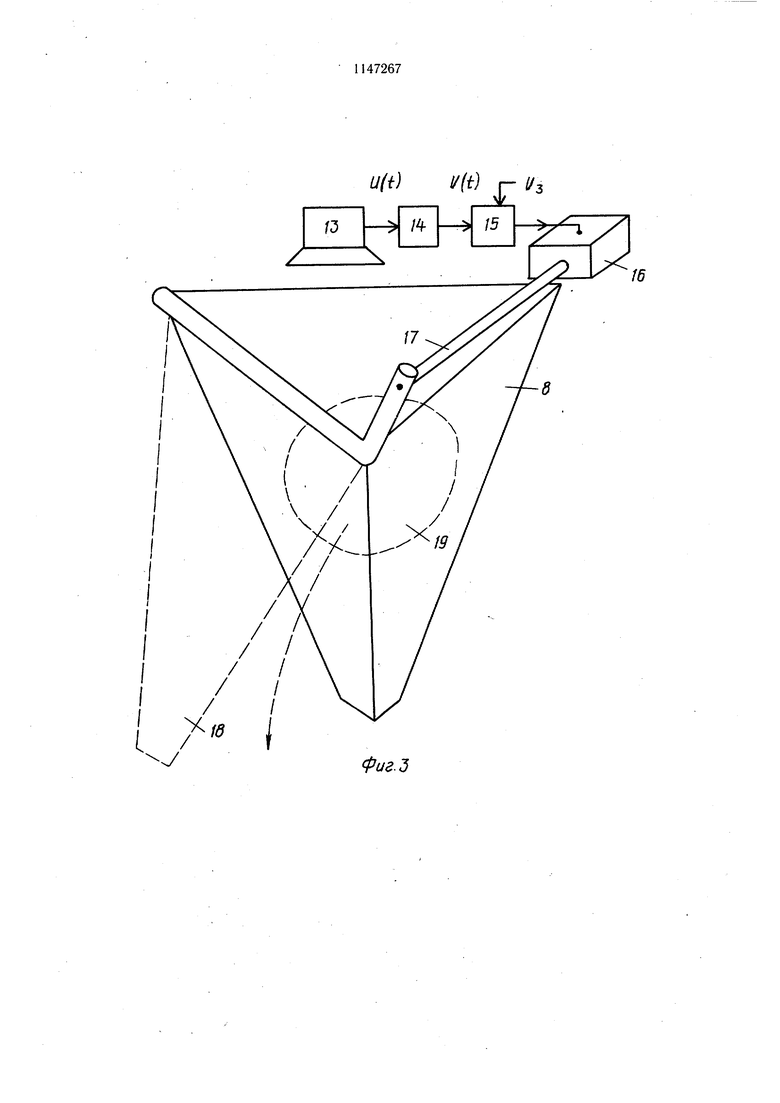
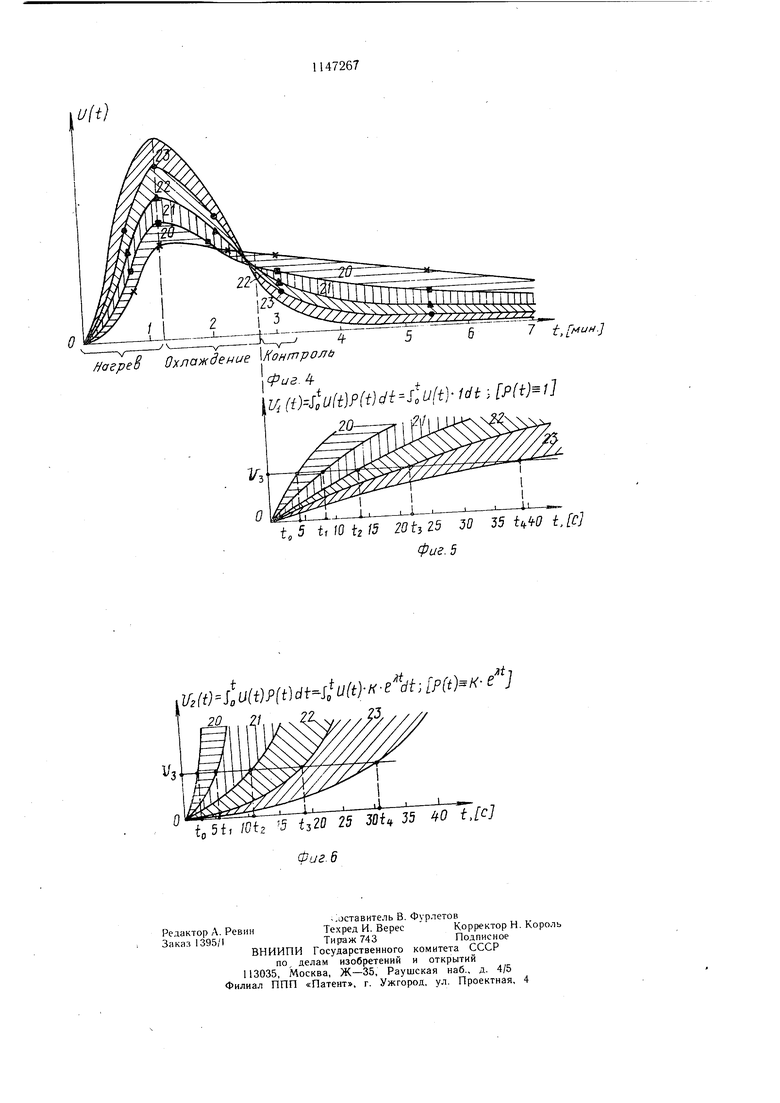
fe./ Изобретение относится к области переработки сельскохозяйственных продуктов, в частности к сортированию картофеля, свеклы, яблок, орехов и других плодов перед их закладкой на хранение, промышленной переработкой или реализацией через торговую сеть. Известны способы сортирования плодов по качеству, включающие термообработку, охлаждение, измерение контролируемого параметра, сравнение его с заданным, формирование командного сигнала, подачу его на исполнительный механизм для проведения инъекции плодов соответствующего качестна 1 и 2. Недостаток известных способов заключается в том, что с их помощью невозможно сортирование плодов по качеству более чем на две фракции из-за низкой распознавающей способности. Цель изобретения - увеличение числа фракций сортирования плодов путем повытения точности,сортирования с учетом степени повреждения. Поставленная цель достигается тем, что согласно способу сортирования плодов по качеству, включающе.му тер.мообработку, о.хлаждение, измерение контролируемого параметра, сравнивание его с заданным, формирование командного сигнала, подачу его на исполнительный механизм для разделения плодов на фракции соответствующего качества, контроль последнего осуществляют но значению времени t, в течение которого текущее значение временной интегральной функции V(t) sU (t)J(()(itстановится равным заданному значению, где lJ(t) - контролируемый параметр плода, f(t) - заданная весовая функция. Во время измерения контролируемого параметра плоды перемещают над бункерами для сбора плодов различного качества в течение 3-20 с. На фиг. 1 изображена схема установки для осуществления способа; на фиг. 2 - то же, вид А на фиг. 1; на фиг. 3 - устройство ячеек для контроля качества плодов; на фиг. 4-6 - графики изменения во времени контролируемого параметра U(t) и временных интегральных функций V(t) для плодов различного качества. Устройство для осуществления .способа сортирования плодов включает в себя бункер-накопитель 1, устройство 2 поштучной подачи плодов, транспортер 3, обогреватель 4, о.хладитель 5, направляющее устройство 6, вращающийся цилиндрический ротор 7 с установленными на нем ячейками 8 для контроля качества плодов, бункеры j - 12 для сбора отсортированных плодов. Ячейки 8 выполнены в виде усеченной пирамиды, верщина которой направЛена вниз. Над открытой верхней частью каждой ячейки установлен датчик 13 контролируемого параметра (например, датчики радиационной температуры, интенсивности инфракрасного излучения или теплового потока). Датчик 13 контролируемого параметра подключен к интегратору 14, выходной сигнал которого подан на вход преобразователя 15, сравнивающего текущее значение временной интегральной функции V(t} с заданным значением Vj и управляющего работой исполнительного механизма 16, соединенного тягой 17 с заслонкой 18. Заслонка 18 обеспечивает удержание плода 19 в ячейке в процессе измерения контролируемого параметра U(t) и выброс плода 19 из ячейки при достижении временной интегральной функцией, описываемой зависимостьюV(t) 3 U{t)i(t)(ii заданного значения Vj, где t - текущее время пребывания плода в зоне контроля, U(t) - контролируемый параметр плода. (t) - заданная весовая функция времени. Способ осуществляется следующим образом. Плоды из бункера-накопителя 1 (фиг. 1) устройством 2 поштучной подачи помещают на транспортер 3, с помощью которого их последовательно подают через зоны термообработки, снабженную обогревателем 4, и охлаждения, снабженную охладителем 5. После охлаждения плоды поступают в зону контроля, выполненную в виде ротора 7 с установленными на не.м ячейка.ми 8. В зоне контроля плоды с помощью направляющего устройства 6 помещают пощтучно в ячейки 8. За счет вращения ротора 7 ячейки 8 перемещают с постоянной скоростью над бункерами 9-12 для сбора плодов различной качества. Контролируемый параметр U(l) измеряют датчиком 13 в течение всего времени (3-20 с) пребывания плода в зоне контроля в ячейке 8. Одновременно с помощью интегратора 14 вычисляют текущее значение временной интегральной функции V(t) |U(t)-p(t)it. Полученный сигнал с выхода интегратора 14 одают на вход преобразователя 15, в котором осуществляют сравнение временной интегральной функции V(t) с заданным значением Vj. Контроль качества плода осуществляют по значению времени t, в течение которого текущее значение временной интегральной функции V.(t) становится равным заданному значению Vj, причем результирующий сигнал подают на исполнительный механизм 16, выбрасывающий плод из зоны контроля в один из бункеров 9-12. Сортировка плодов обеспечивается за счет того, что контролируемый параметр U(t) у плодов различного качества изменяется по-разному, и соответственно, временная интегральна функция V(t) S U(t)p(t)dl
становится равной заданному значению Vj в разные моменты времени (например, на фиг. 4-6 показаны области изменения во времени .контролируемого параметра U(t) и временных интегральных функций). V, (t) I lJ(t)dt, (t)sll и V(t) J L{t). p(t). для плодов различного качества.
Графики изменения во времени контролируемого параметра U(t) и временных интегральных функций Vi(t), ) для плодов высокого качества (1 сорт) проходят через области 20. Для плодов хорошего качества с небольшими дефектами (2 сорт) графики и (t) Vi (t)Уг (t) проходят через области 21. Для плодов удовлетворительного качества с существенными дефектами (3 сорт) графики U(t) ,Ui (t), Ua(t) проходят через области 22. Для дефектных плодов графики U{t), Vi{t), ) проходят через области 23. Таким образом, (фиг. 5 и 6} временные интегральные функции Vi(t) и Vj(t) в случае плодов первого сорта становятся равными заданному значению в промежутке времени ,, в случае нлодов второго сорта - в промежутке времени t, , в случае .плодов третьего сорта - в промежутке времени , а в случае дефектных плодов - при . Бункеры 9-12 изготовлены так, что ячейки 8 с контролируемым плодом в промежутке времени t, it, находятся над бункером 9, в промежутке времени t над-бункером 10, в промежутке времени -ts - над бункером 11, а в промежутке времени t ti - над бункером 12. Таким образом, в рассмотренном примере реализации способа сортировки плодов обеспечивается разделение плодов на четыре фракции. Очевидно, что аналогично может быть обеспечено разделение
0 плодов на три или пять фракций.
В предлагаемом способе полезным является то, что задавая oпpeдev eнным образом весовую функцию 9 (t) можно изменять зпачеп11е моментов времени t, t,, t, tj оиределяюищх длительность промежутков
5 времени, в точение которых временная интегральная функция V(t) становится равной заданному значению. Например, пpи5(t) 1 временная интегральная функция V (t) -SU(t)dt для нлодов 3 сорта становится
0 равна заданному значению нри 22 с, а нри y(t)ke временная интегральная функция Vt(t) .Г Ll(t)ke ctl становится равная заданному значению при , 18 с. Таким образом, в случае (t) ke можно 5 умешэшить время пребывания н,1ода в ячейке а значит, нри за танных размерах ротора 7 можно увеличить скорость его вращения и повысить производите.п ность установки.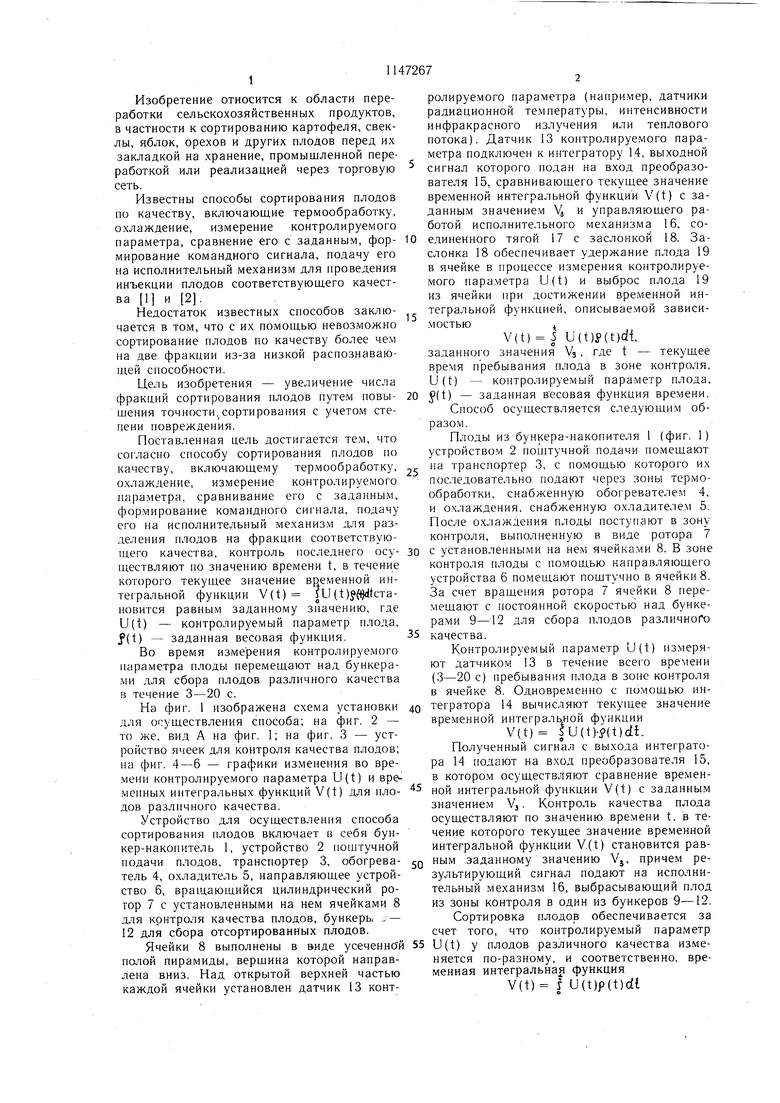
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сортировки плодов | 1976 |
|
SU612724A1 |
| Устройство для измерения функции распределения случайной погрешности аналого-цифровых преобразователей | 1984 |
|
SU1256202A2 |
| Способ управления роторным комплексом и устройство для его осуществления | 1987 |
|
SU1537776A1 |
| Способ контроля качества винтовой поверхности и устройство для его осуществления | 1985 |
|
SU1310639A1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ОБРАБОТКИ И АНАЛИЗА ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2557477C2 |
| Способ неразрушающего контроля теплофизических характеристик материалов и устройство для его осуществления | 1986 |
|
SU1402892A1 |
| Адаптивная система управления агломерационной установкой | 1981 |
|
SU1125604A1 |
| Устройство для контроля и управления режимом работы роторного комплекса | 1984 |
|
SU1180461A1 |
| Способ сортировки корнеклубнеплодов | 1982 |
|
SU1389881A1 |
| Способ автоматического управления процессом промывки целлюлозы на барабанных фильтрах | 1983 |
|
SU1163886A1 |
1. СПОСОБ СОРТИРОВАНИЯ ПЛОДОВ ПО КАЧЕСТВУ, включающий термообработку, охлаждение, измерение контролируемого параметра, сравнивание его с заданным, формирование командного сигj:SSJi34. : V нала, нодачу его на исиолнительны.и механизм для разделения плодов на фракции соответствующего качества, отличающийся тем, что, с целью увеличения числа фракций сортирования плодов нутем новьииеиия точности сортирования с учетом степени повреждения, контроль последнего осуществляют но значению времени t, в течение которсич) текун1ее значение временной интегральной функции V(t) 5U(t)H)(ii: становится равным заданному значению, где U(t) - контролируемый параметр нлода, jd) - заданная весовая функция. 2. Способ но и. 1, отличающийся тем, что во время измерения контролнруемого нараметра плоды неременхают над бункерами для сбора нлодов различного качества в теS чение 3 20 с. (Л , « Ю ot 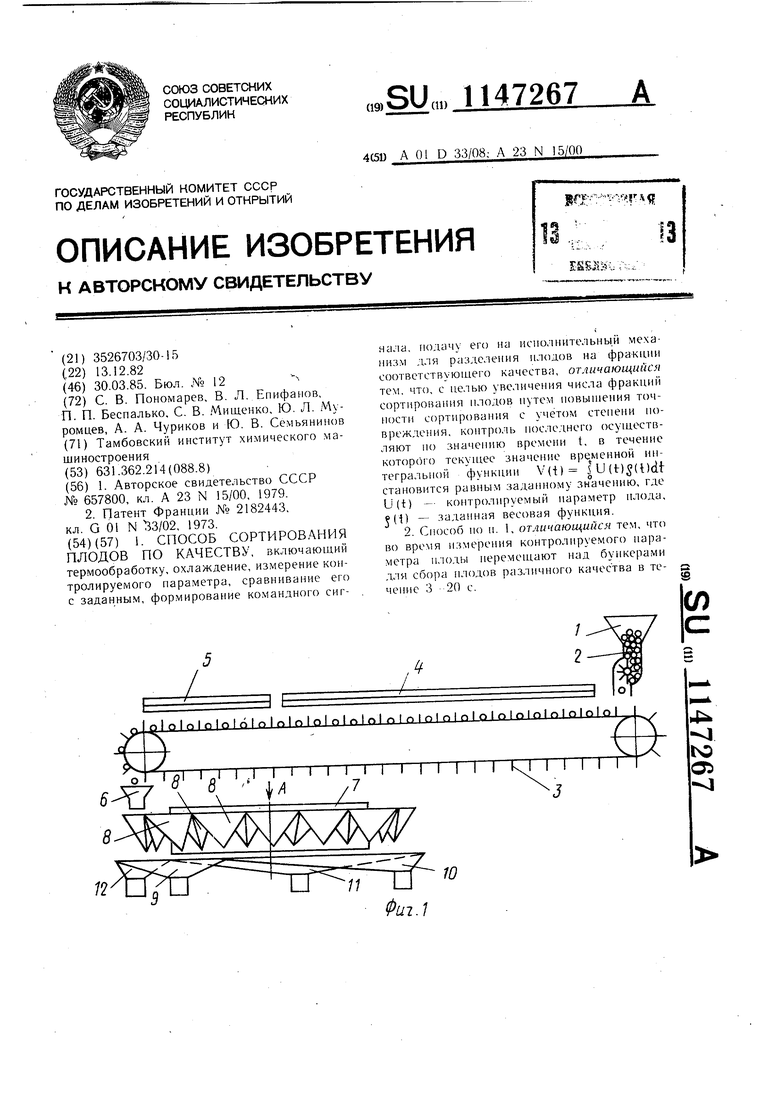
7
/7
11
10
fill.9
f3
f
f
/
X
i9
Фиг.
n i -t -edi-/lP(.i/,f)j(t))
tn 5ti /Otz -5 Ь20 25 30U
xi
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ сортировки биологических объектов | 1977 |
|
SU657800A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ ПРОИЗВОДСТВА ПЛОДОВО-ЯГОДНОГО ДЕСЕРТА | 2000 |
|
RU2182443C2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
