72 73 lii
фцг. 7
О5 В
Изобретение относится к подъемно-транспортным машинам.
Цель изобретения - повышение удобства эксплуатации гидравлического крана-манипулятора.
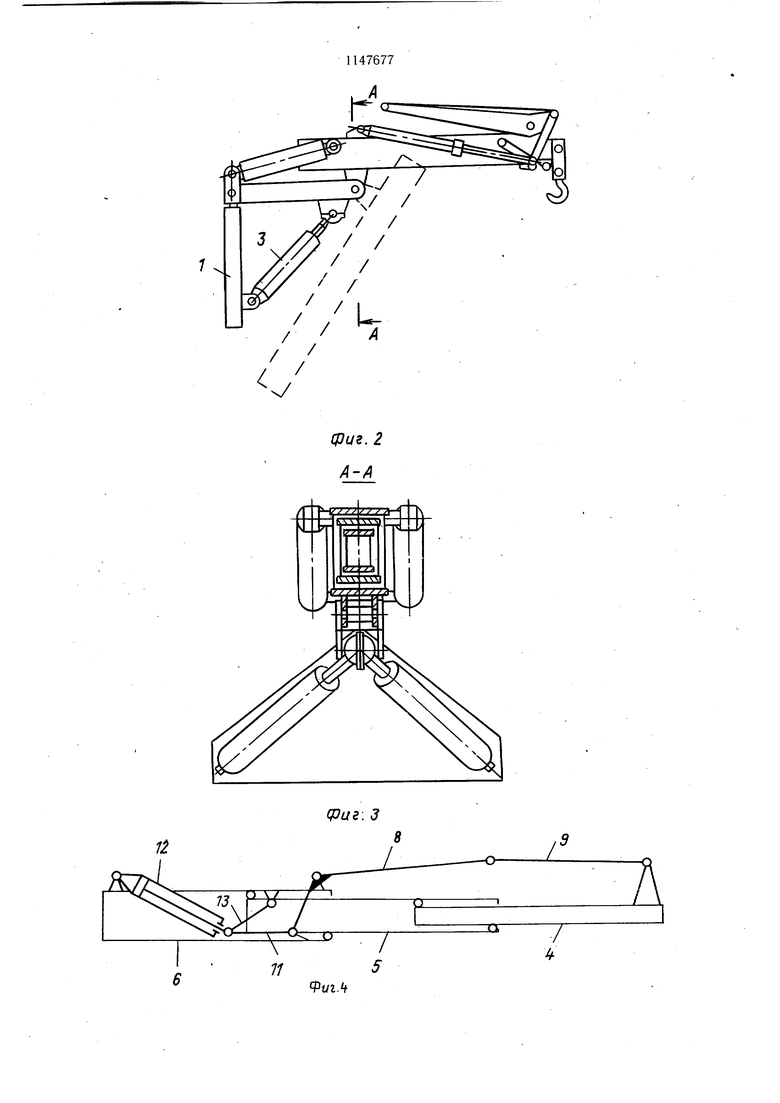
На фиг. 1 схематично изображен гидравлический кран-манипулятор, в рабочем положении; на фиг. 2 - то же, в транспортном положении; на фиг. 3 - разрез АтА на фиг. 2 на фиг. 4 - кинематическая схема механизма; на фиг. 5 - график изменения относительного усилия в гидроцилиндрах выдвижения секции под нарузкой (для предлагаемого устройства - кривая «б, для известного - кривая «а).
Гидравлический кран-манипулятор содержит установленную на основании 1 шарнирно-сочлененную стрелу 2 с механизмом подъема и поворота, выполненным, например, в виде силовых цилиндров 3. Рукоять стрелы 2 выполнена телескопической из звеньев 4-6, расположенных внутри друг друга в транспортном положении. На неподвижном звене 6 телескопической рукояти на осях 7 закреплены с возможностью вращения двуплечие рычаги 8, выполненн} 1е угловыми с разными величинами плеч, большее плечо шарнирно связано с рычагом 9 и его величина определяется вылетом телескопической рукояти, а меньшее плечо через ось 10 связано с тягой 11. Корпуса двух гидроцилиндров 12 симметрично (фиг. 3) относительно оси рукояти шарнирно закреплены на неподвижном звене 6, а штоки их через промежуточные тяги 13 посредством осей 14 и 15 связаны с неподвижным звеном 6 и с тягой 11.
Работа крана-манипулятора осуществляется следующим образом.
В исходном положении (фиг. 2) звенья 4 и 5 телескопической рукояти расположены внутри неподвижного звена 6, штоки гидроцилиндров 12 выдвинуты из корпусов.
В рабочем положении стрела 2 кранаманипулятора выдвигается, для чего рабочую жидкость подают в штоковую полость гидроцилиндров 12, штоки которых, перемешаясь, увлекают посредством тяг 11 короткое плечо рычага 8, вызывая его вращение вокруг оси 7 по часовой стрелке. При этом тяга 13 поворачивается относительно оси 14, постоянно обеспечивая плечо действия усилия гидроцилиндра 12. Второе плечо рычага 8 при своем повороте толкает рычаг 9, который выдвигает звенья 4 и 5 рукояти.
В процессе выдвижения телескопической рукояти под нагрузкой по мере увеличения ее вылета возрастает усилие сопротивления перемещению, так как увеличивается грузовой момент. Одновременно и угол между плечом рычага 8 и рычагом 9 приближается к 180°, а благодаря промежуточным тягам 13 и тяге 11 плечо действия усилия, приложенного к меньшему плечу рычага 8 и передаваемого от гидроцилиндра 12, меняется незначительно. Это приводит к такому изменению суммарного передаточного отношения всей системы, что усилие, развиваемое гидроцилиндром 12 (N) в конце выдвижения телескопической рукояти п-адает, так как плечо, на -котором оно действует, достигает максимального значения. Это благоприятно сказывается на динамике выдвижения секции с грузом на крюке (на фиг. 5 кривая «б).
На фиг. 5 обозначено: Р - сила, необходимая для перемещения подвижных звеньев телескопической рукояти, N - усилие, развиваемое гидроцилиндром, S - ход телескопической рукояти.
Втягивание рукояти производят следующим образом.
Давление рабочей жидкости подают в поршневую полость гидроцилиндра 12, шток которого, выдвигаясь, вращает посредством тяги 11 вокруг оси 7 рычаг 8 против часовой стрелки. Рычаг 8 увлекает за собой рычаг 9 и перемещает звенья 4 и 5 внутрь неподвижного звена 6.
фиг. 2 А-А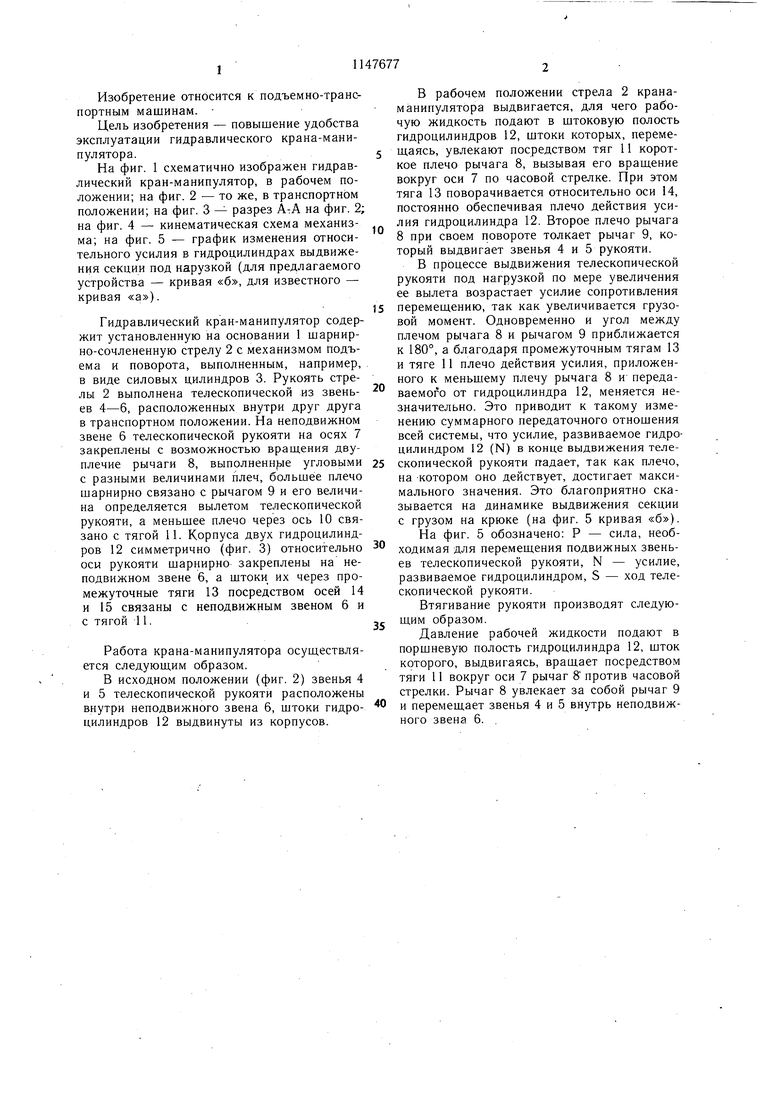
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2274559C1 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2001 |
|
RU2199484C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168456C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158207C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158709C1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2037464C1 |
ГИДРАВЛИЧЕСКИЙ КРАНМАНИПУЛЯТОР по авт. св. № 544606, отличающийся тем, что, с целью повышения удобства эксплуатации, рычаг, соединенный с неподвижной частью секции, выполнен двуплечим, а шток установленного на неподвижной секции гидроцилиндра шарнирно соединен посредством одной тяги с меньшим плечом упомянутого рычага, а другой - с неподвижной секцией.
IL -P
W
1 0
G15
0,25
5,rt
/.75
1,25
gjus.S
| Гидравлический кран-манипулятор | 1970 |
|
SU544606A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
