ход - с переключателем, а декодирующий блок подключен входом к выходу
Изобретение относится к металлорежущим станкам, а именно к устройству управления ориентацией шпинделя, Которое может останавливать шпиндель в произвольном положении вращения.
Целью изобретения является повышение .точности за счет сокращения числа команд.
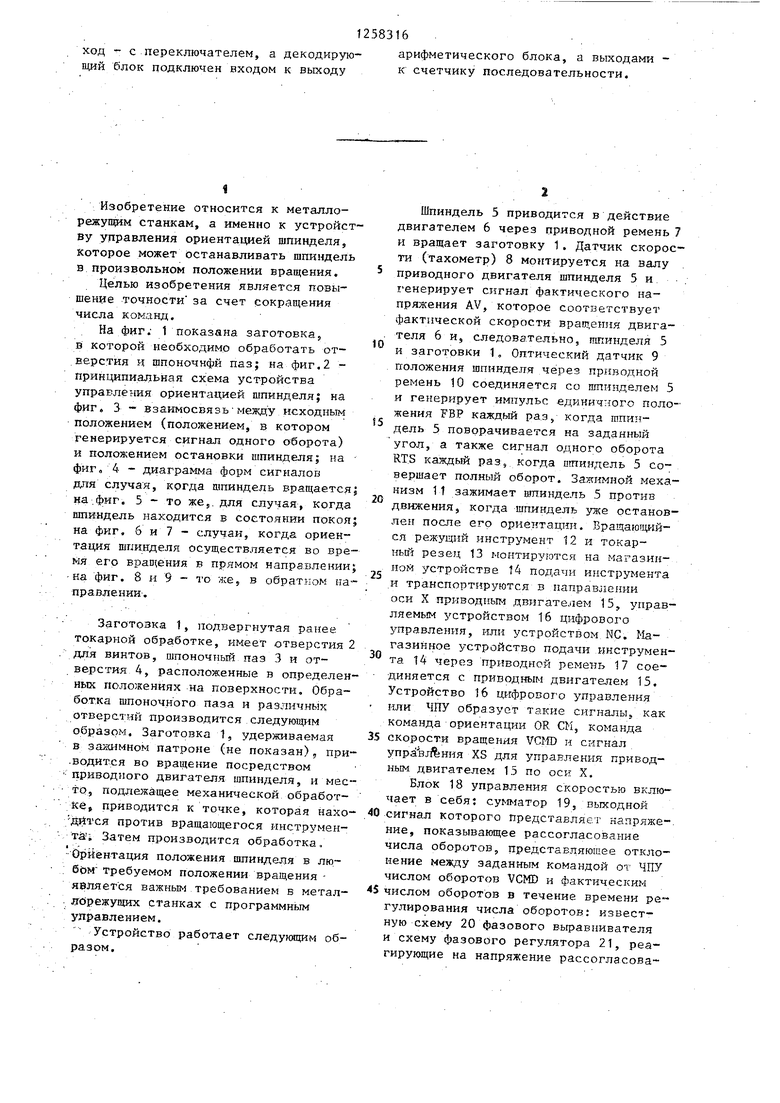
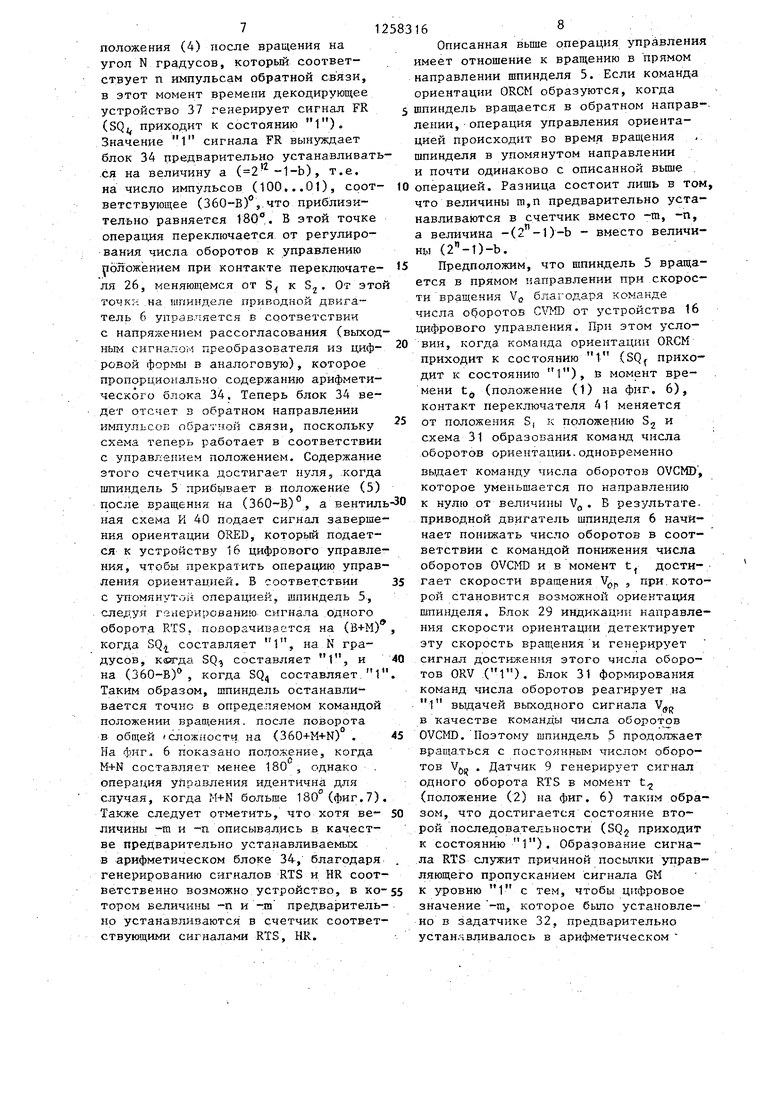
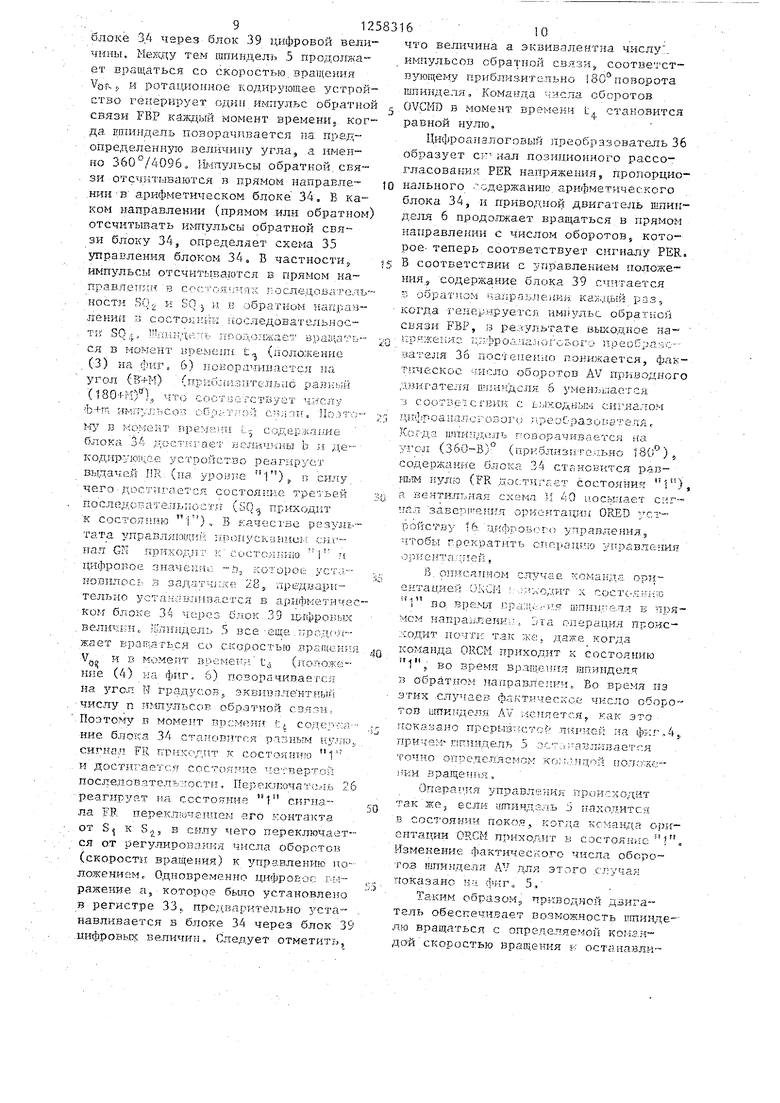
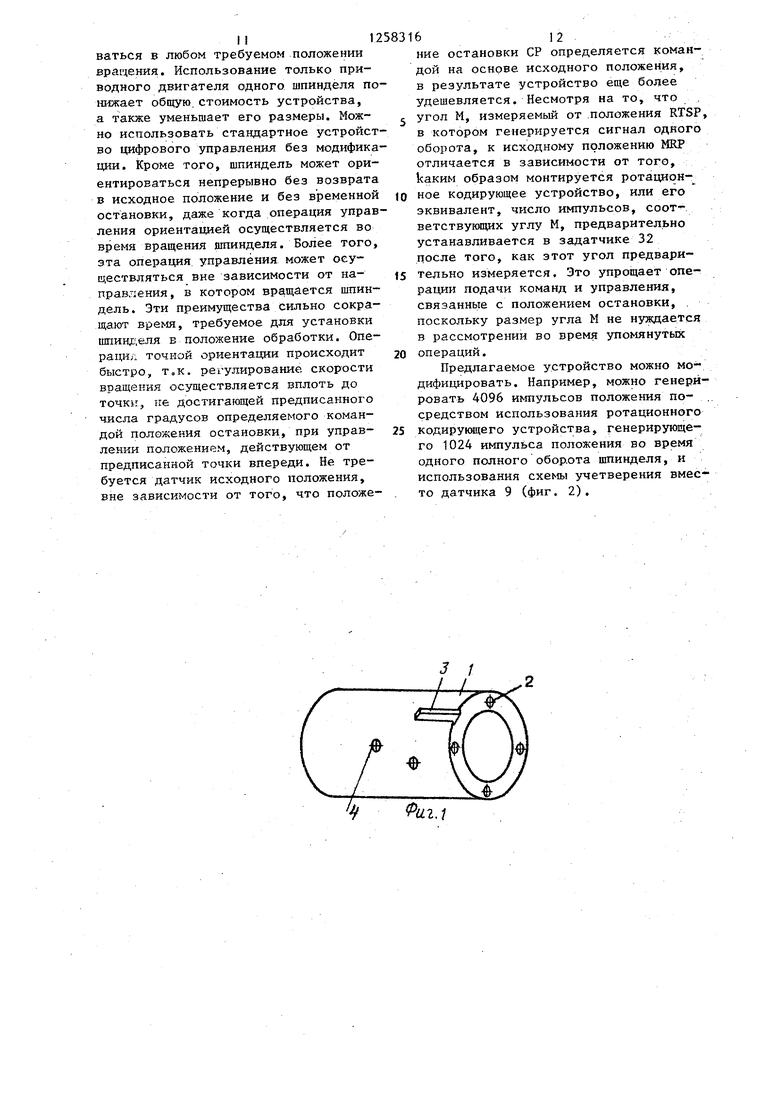
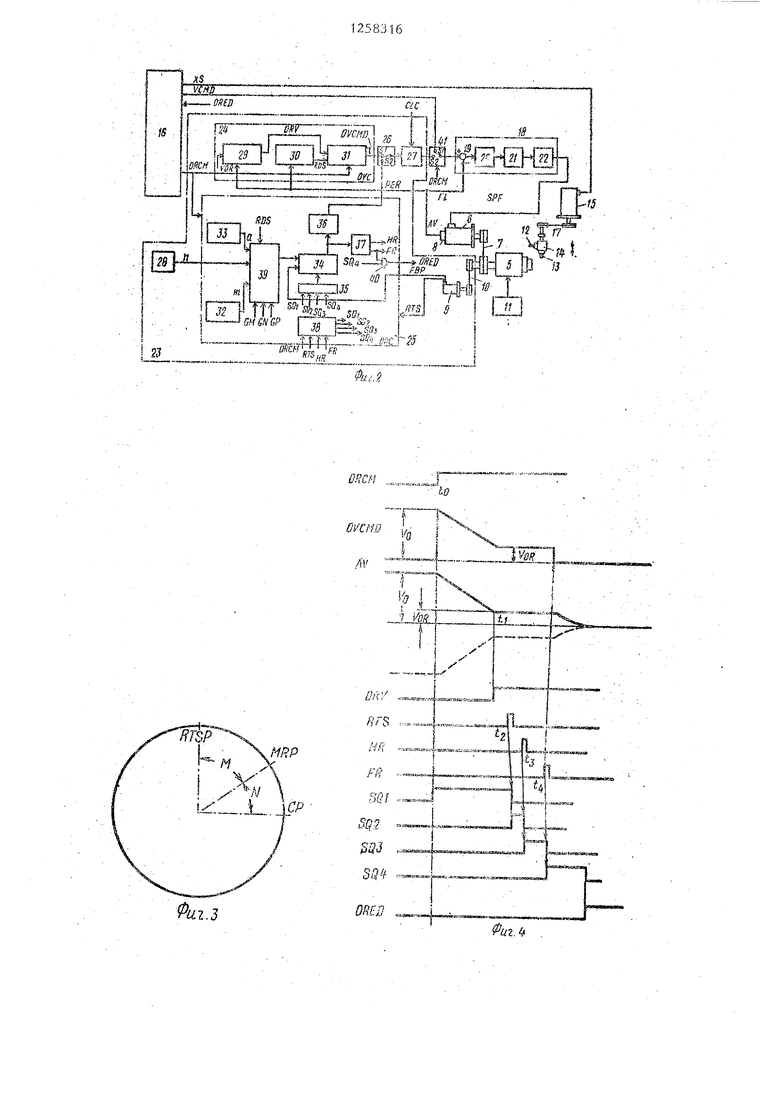
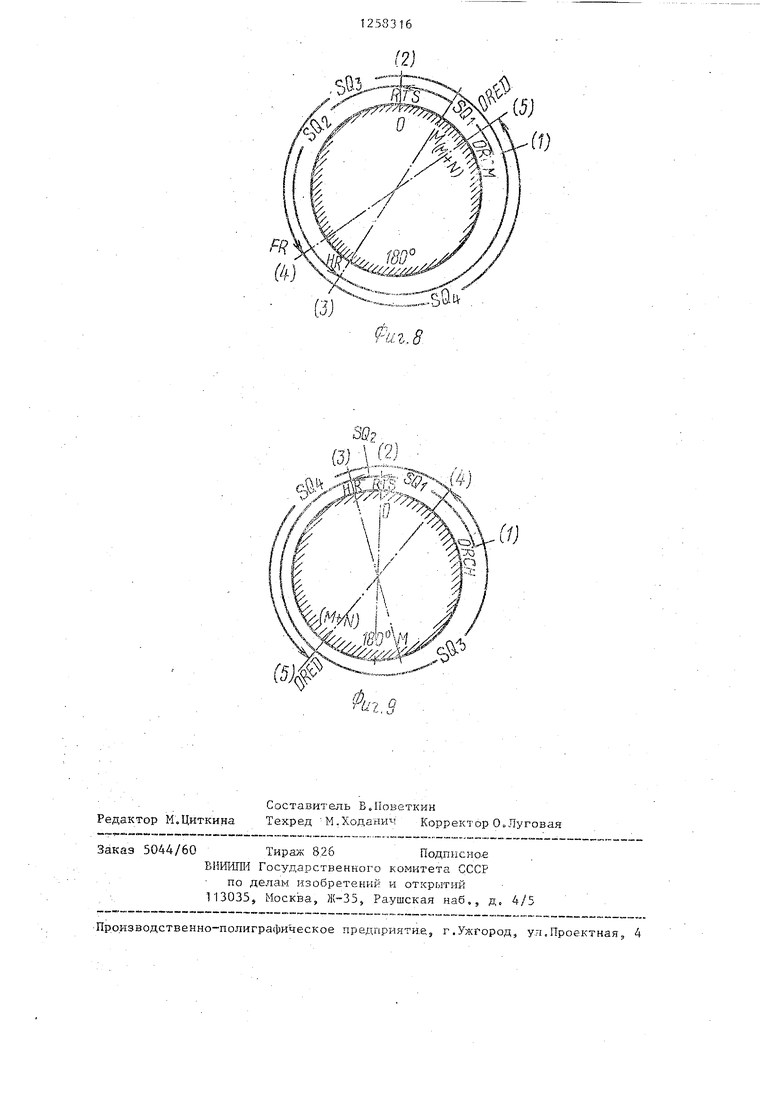
На фиг; 1 показана заготовка, в которой необходимо обработать от- верстия и щпоночнфй паз; на фиг.2 - принципи.альная схема устройства управлеиня ориентацией шпинделя; на фиг. 3 - взаимосвязь-между исходным положением (положением, в котором генерируется сигнал одного оборота) и положением остановки шпинделя; на фиг 4 - диаграмма форм сигналов для случа я, кргда шпиндель вращается | на.фиг. 5 - то же,, для случая, когда шпиндель находится в состоянии покоя; на фиг, 6 и 7 - случаи, когда ориентация шпинделя осуществляется во время его в прямом направлении; -на фиг. 8 и 9 - то же, в обратном направлении.
Заготовка 1, подвергнутая ранее токарной обработке, имеет отверстия 2 для винтов, шпоночный паз 3 и отверстия 4, расположенные в определенных: положениях на поверхности. Обработка шпоночного паза и различных отверстий производится.следующим образом. Заготовка 1, удерживаемая в захшмном патроне (не показан), при .водится во вращение посредством приводного двигателя шпинделя, и место, подлежащее механической, обработке, приводится к точке, которая нахо дйтся против вращающегося ннструменTa i Затем производится обработка, Ориентация положения шпинделя в лю. 6ОМ требуемом положении вращения- является важным.требованием в металлорежущих станках с программньм управлением.
Устройство работает следующим образом.
1258316
арифметического блока, а выходами - к счетчику последовательности.
5
0
5
0
5
40
45
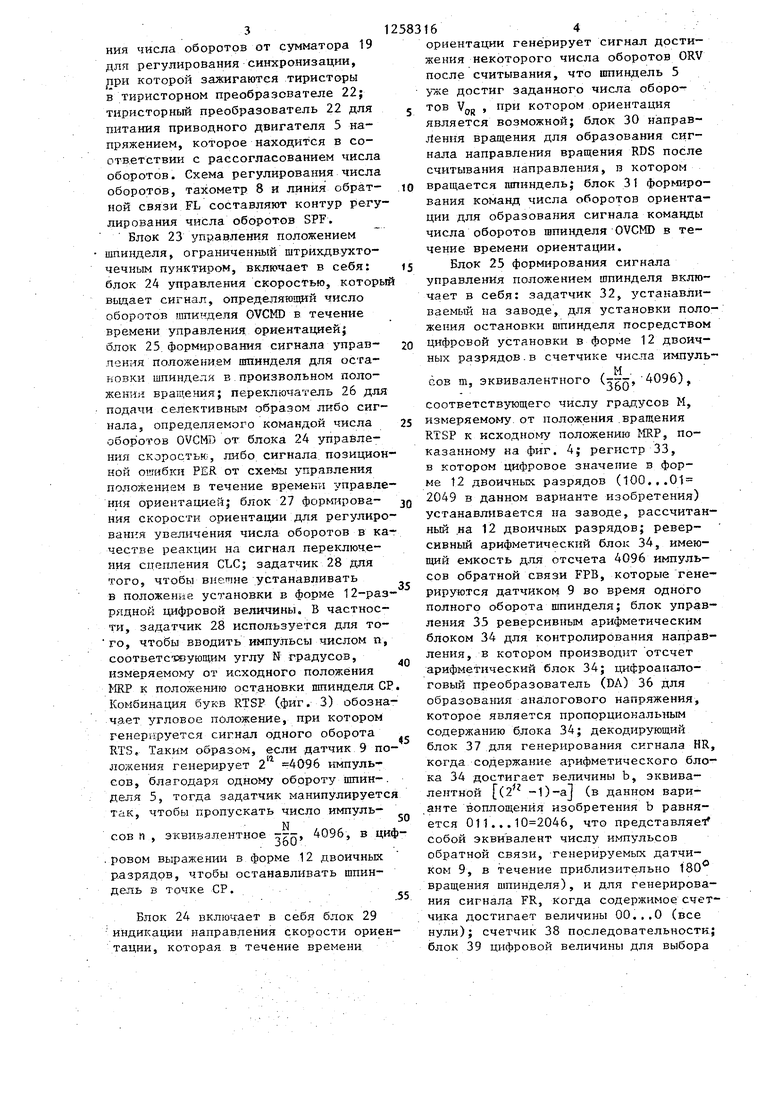
Шпиндель 5 приводится в действие двигателем 6 через приводной ремень 7 и вращает заготовку 1. Датчик скорости (тахометр) 8 монтируется на валу приводного двигателя шпинделя 5 и генерирует сигнал фактического напряжения AV, которое соответствует фактической скорости вращения двигателя 6 и, следовательно, шпинделя 5 и заготовки 1, Оптический датчик 9 положения шпинделя через приводной ремень 10 соед.иняется со шпинделем 5 и генерирует импульс единичного поло- жения FBP каждый раз, когда шпиндель 5 поворачивается на заданный угол, а также сигнал одного оборота RTS каждый раз,, когда пгпиндель 5 совершает полный оборот. Зажимной механизм 11 зажимает шпиндель 5 против движения, когда шпиндель уже остановлен после его орие.нтад.ин. Вращаю дий- ся режущий инструмент 12 и токар- ньй резец 13 г-гонтируются на магазинной устройстве t4 подачи инструмента .и транспортируются в паправлении оси X приводным двигателем 15, управляемым устройством 16 цифрового управления, или устройством NG. Магазинное устройство подачи инструмента t4 через приводной ремень 17 соединяется с приводным двигателем 15. Устройство 16 цифрового управления или ЧПУ образует такие сигналы, как команда ориентации OR СМ, команда скорости вращения VCMD и сигнал yпpa вJftния XS для управления приводным двигателем 15 по оси X.
Блок 18 управления скоростью включает в себя: сумматор 19, выходной сигнал которого представляет напряже-, ние, показывающее рассогласование числа оборотов, представляющее отклонение между заданным командой от ЧПУ числом оборотов VCMD и фактическим числом оборотов в течение времени ре гулирования числа оборотов: известную схему 20 фазового выравнивателя и схему фазового регулятора 21, реагирующие на напряжение рассогласования числа оборотов от сумматора 19 для регулирования синхронизации, рри которой зажигаются тиристоры в тиристорном преобразователе 22; тиристорньй преобразователь 22 для питания приводного двигателя 5 напряжением, которое находится в соответствии с рассогласованием числа оборотов. Схема регулирования числа оборотов, тахометр 8 и линия обрат- ной связи FL составляют контур регулирования числа оборотов SPF.
Блок 23 управления положением шпинделя, ограниченный штрихдвухто- чечиьш пунктиром, включает в себя: блок 24 управления скоростью, который выдает сигнал, определяю да1й число оборотов гппкнделя OVCMD в течение времени управления ориентацией} блок 25 формирования сигнала управ- Ленин положением шпинделя для остановки шпинделя в.произвольном положения вращения; переключатель 26 для подачи селективным образом либо сигнала, определяемого командой числа обор отов OVCMD от блока 24 управления скоростью, либо сигнала, позиционной ошибки PER от схемы управления положением в течение времени управления ориентацией; блок 27 форю рова- ния скорости ориентации для регулирования увеличения числа оборотов в качестве реакции на сигнал переключения сцепления CLC; задатчик 28 для того, чтобы внешне устанавливать в положение установки в форме 12-раз- рядной цифровой величины. В частности, задатчик 28 используется для то- го, чтобы вводить импульсы числом п, соответс-евующим углу N градусов, измеряемому от исходного положения МНР к полож-ению остановки пшинделя СР Комбинация букв RTSP (фиг. 3) обозначает угловое положение, при котором генерируется сигнал одного оборота RTSe Таким образом, если датчик,9 положения генерирует 2 4096 кмпуль- С.ОВ, благодаря одному обороту шпин-. деля 5, тогда задатчик манипулируется так, чтобы пропускать число импуль-
N
50
сов я , эквивалентное , 4096, в цифровом выражении в форме 12 двоичных разрядов, чтобы останавливать шпиндель в точке СР.
Блок 24 включает в себя блок 29 индикации направления скорости ориентации, которая в течение времени
j ю
15 jo 25 JQ
35
40
45
0
ориентации генерирует сигнал достижения некоторого числа оборотов ORV после считывания, что шпиндель 5 уже достиг заданного числа оборотов Vg., , при котором ориентация является возможной; блок 30 направления вращения для образования сигнала направления вращения RDS после считывания направленля, в котором вращается шпиндель; блок 31 формирования команд числа оборотов ориентации для образования сигнала команды числа оборотов шпинделя OVCMD в течение времени ориентации.
Блок 25 формирования сигнала управления положением шпинделя включает в себя: задатчик 32, устанавливаемый на заводе, для установки положения остановки шпинделя посредством цифровой установки в форме 12 двоичных разрядов.в счетчике числа импульсов т, эквивалентного (гр, 4096) ,
соответствующего числу градусов М, измepяeмo ry от положения .вращения RTSP к исходному положению MRP, показанному на фиг. 4; регистр 33, в котором цифровое значение в форме 12 двоичных разрядов (100...01 2049 в данном варианте изобретения) устанавливается на заводе, рассчитанный .на 12 двоичных разрядов; реверсивный арифметический блок 34, имеющий емкость для отсчета 4096 импульсов обратной связи FPB, которые генерируются датчиком 9 во время одного полного оборота шпинделя; блок управления 35 реверсивным арифметическим блоком 34 для контролирования направления, в котором производит отсчет арифметический блок 34; цифроанало- говый преобразователь (DA) 36 для образования аналогового напряжения, которое является пропорциональным Содержанию блока 34; декодирующий блок 37 для генерирования сигнала HR, когда содержание арифметического блока 34 достигает величины Ь, эквивалентной (2 -1)-aJ (в данном вари- ,анте воплощения изобретения b равняется 011... , что представляет собой эквивалент числу импульсов обратной связи, генерируемых датчиком 9, в течение приблизительно 180 вращения шпинделя), и для генерирования сигнала FR, когда содержимое счетчика достигает величины 00.,.0 (все нули); счетчик 38 последовательности; блок 39 цифровой величины для выбора
одного из .цифровых значений а, т, п и для предварительной установки арифметического блока 34 на выбранное
Значение; вентильную схему И 40 ля подачи сигнала завершения ориен- j тации ORED.
Счетчик 38 последовательности одает сигнал состояния первой послеовательности SO,, эквивалентный 1, в качестве реакции на образо вание 10 команды ориентации ORCM, управляющей через переключатель 41, а также состояний второй, третьей и четвертой последовательностей SQ, SQ и SQ,, все эквивалентные 1, в качестве 15 реакции на генерирование сигнала одного оборота RTS и сигналов HR (на уровне 1) и FR (на уровне 1) соответственно. БлоЙ 39 цифровой величины предварительно устанавливает 20 арифметический блок 34 в состояние содержимого m или -т в соответствии с сигналом направления вращения шпинделя RDC, если генерируется сигнал одного оборота RTS (сигнал, управляю-35 щнй пропусканием GM, приходит к уровню 1)., когда сигнал SO, находится на уровне 1, предварительно .устанавливает . счетчик -в состояние содер-- жИмого п или п в. соответствии с сиг- 30 налом направления вращения шпинделя RDS, асли сигнал HR приходит к уровню- (сигнш, управляющий пропусканием GNj приходит, к уровню 1), когда сигнал 50, находится на уров- 35 не 1, и предварительно уста.навли- вает счетчик в состояние содержимого а. или -а если сигнал FP приходит к уровню 1 (сигнал, управляющий пропусканием GP, приходит к уровню 40 1)j когда SO находится на уровне 1,
В предлагаемом устройстве нет необходимости использовать какой-либо датчик для индикации исходного поло- 5 жения ШР, даже если положение остановки шпинделя (СР на фиг, 3) обуславливается посредством задатчика 28 на основе исходного .положения MRP;, Датчик исключается, т.к. он является jo дорогим и не может легко и точно давать индикацию исходного положения.
В соответствии с изобретением,, датчик заменяется устройством, в кото-- ром число градусов М, измеряемое от положения RTSP (положения вращения) к. исходному положению MRP, з стапав- ливается задатчиком 32, Поскол.ьку величина угла М различна в различных- станках, в зависимости от того, каким образом монтируется датчик 9, М измеряется для каждого станк а и число импульсов т, соответствующее этому углу, затем устанавливается задатчиком 32, Задатчик 32 устанавливается .внутри устройства, чтобы предупреждать проблемы, возникающие в результате случайного изменения установленной величины га,
Задатчик 28, устанавливающий положение остановки шпинделя, используется для ввода числа импульсов п, соответствующего углу N, от исходног
положения MRP до- положения остановки СР. Число импульсов ш, соответствующее углу М от положения вращени RTSP к исходному положению MRP, предварительно устанавливается задатчи- ком 32 для установки положения остановки шпинделя. Эти операции точно определяют положения остановки шпинделя СР.
При вращении шпинделя в прлг-юм направлении предполагается., что команда ориентации ORCM образуется (SO, приходит к состоянию 1), когда шпиндель находится в полож.ении (1), фиг, 6. Образование команды ORCM вынуждает шпиндель начинать вращение со скоростью вращения V , при которой становится возможной ориентация, и .генерируется сигнал одного -оборота RTS (SQg приходит к состоянию 1), когда шпиндель находится в положе- Н.ИИ (2). В .этот момент времен.и числовое значение -т предварительно устанавливается в арифметический блох 34 (фиг. 2). Шпиндель продолжает вращение со скоростью VQ ,, а блок 34 веде отсчет в прямом напразленйи импульсо обратной связи FBP при содержимом счетчика, достигающем величины Ь, когда шпиндель достигает полоке- ння (З)5 после поворота на угол (В+М) . , который соотв.етствует Ь+г:; импульсам обратной связи, В этот мо.- мент времен.и декодирующее устройство 37 генерирует сигнал HR (SQ приходит к состоянию 1), Б силу чего предварительно устанавливает ариф.ме- тический блок .34 в состояние отсчета -п. Шпиндель продолжает вращение со скоростью УО ,, а блок 34 ведет отсчет в прямом направлении импульсов обратной связи FBP при содержимом счетчика, достигаюП См кулевого значения, когда шпиндель достигает
712
положения (4) после вращения на угол N градусов, который соответствует п импульсам обратной связи, в этот момент времени декодирующее устройство 37 генерирует сигнал FR (SQ приходит к состоянию 1). Значение 1 сигнала FR вынуждает блок 34 предварительно устанавливать .ея на величину а (2 -1-Ь), т.е. на число импульсов (I00,..0l), срот- ветствующее (360-В)°,.что приблизительно равняется 180°. В этой точке операция переключается от регулирования числа оборотов к управлению положением при контакте переключате- ля 26, меняющемся от S к S. От этой точки .на шпинделе приводной двигатель 6 управляется в соответствии с напряжением рассогласования (выходным сигналом преобразователя из циф- ровой формы в аналоговую), которое пропорционально содержанию арифметического блока 34. Теперь блок 34 ведет отсчет в обратном направле.нии импульсов обратной связи, поскольку схема теперь работает в соответствии с управлением положением. Содержание этого счетчика достигает нуля, .к.огда шпиндель 5 прибивает в положение (5) после вращения на (360-Б)°, а вентиль ная схема К 40 подает сигнал завершения ориентации ORED, которьй подается к устройству 16 цифрового управления, чтобы прекратить операцию управления ориентацией. В соответствии с упомянутой операцией, шпиндель 5, следуя генерированию сигнала .одного оборота RTS. поворачивается на (В+М) когда SQ составляет 1, на N градусов, каггда SQ составляет 1, и на (360-В) , когда SQ составляет 1 Таким образом, шпиндель останавливается точно в опреде..пяемом командой положении вращения, после поворота в общей СЛОЖНОСТИ, на (360+M+N) . На фиг, 6 показано положение, когда M-t-N составляет мене.е 180 , однако операция управления идентична для случая, когда М+К больше 180°(фиг.7). Также следует отметить, что хотя ве- личины -т и описывались в качестве предварительно устанавливаемых в арифметическом блоке 34, благодаря генерированию сигналов RTS и HR соответственно возможно устройство, в котором величины -п и -.т предваритель- но устанавливаются в счетчик соответствующими сигналами RTS, HR.
16S
Описанная выше операция управления имеет отношение к вращению в прямом направлении шпинделя 5. Если команда ориентации ORCM образуются, когда шпиндель вращается в обратном направлении, операция управления ориентацией происходит во время вращения , шпинделя в упомянутом направлении и почти одинаково с описанной . операцией. Разница состоит лишь в том что величины т,п предварительно устанавливаются в счетчик вместо -т, -п, а величина -()-Ь - вместо величины (,
Предположим, что шпиндель 5 вращается в прямом направлении при скорости вращения о благодаря команде числа оборотов CV14D от устройства 16 цифрового управления. При этом усло- вии, когда команда ориентации ORCM приходит к состоянию 1 (SQf приходит к состоянию 1), б момент времени tj, (положение (1) на фиг. 6), контакт переключателя 41 меняется от положения S, к положению S и схема 31 образоБания команд числа .оборотов ориентации.одновременно выдает команду числа оборотов OVCMD, которое уменьшается по направлению к нулю от величи1 ы Уд. В результате, приводной двигатель шпинделя 6 начинает понижать число оборотов в соответствии с командой понижения числа оборотов OVCMD и в момент t, достигает скорости вращения , при.которой становится возможной ориентация шпинделя. Блок 29 индикации направления скорости ориентации детектирует эту скорость вращения и генерирует сигнал достижения этого числа оборотов ORV (1). Блок 31 формирования команд числа оборотов реагирует на 1 выдачей выходного сигнала V, в качестве команды числа оборотов OVCMD. Поэтому шпиндель 5 продолжает Bpanja.TbcH с постоянным числом оборотов Vji . Датчик 9 генерирует сигнал одного оборота RTS в момент t (положение (2) на фиг. 6) таким образом, что достигается состояние второй последовательности (SQj приходит к состоянию 1). Образование сигнала RTS служит причиной посьшки управляющего пропусканием сигнала GM к уровню 1 с тем, чтобы цифровое значение -га, которое бьто установлено в задатчике 32, предварительно устанавливалось в арифметическом
блоке 3,4 через блок 39 цифровой вели- чннь. Между тем шпиндел)т 5 продолжает вращаться со скоростью, вратден гя Vor-j. и ,ротационное кодирующее, устрой- стзо гекерируат один импульс обратной связи FBP момент времекН; когда шпиндель позорачи)зается па предопределенную величину угла, а именно 360/4096 Импульсы обратной, связи отсчитываются в прямом направле- , арифметическом блоке 34. В ком направлении (прямом ,или обратном) отсчитывать и тульсы обратной связи блоку 34, определяет схема 35 управления блоком 34, В частности,, импульсы отсчиты,ваются в прямом ка правлетпгн з ссчг -оячнях 1;оследователь ности г ле НИИ л
ТИ SQ,;, ШЯИЗ
ел в момент времени t (положение , (:3) на фиг угол (B-S-M) (ISO-fTi)); чтс
Ь+ТП ИМГ;у,ПЬСО5:
иу в мо,мент времени L- содержа1,ие блока 34 дост лП ае велнчиньз b л де- кодирую чее з стройство реагирует выдачей (па ypoBi-ie 1), г; силу чего досгпг ае7 ся состояние третьей последовательпоет;; (ьО приходит к состоянию Г ), В качесгве результата управлягау й пгнзпз скание - смх - нал GN прякодп г к состопп-по Ч я цифровое значемнс которое уета.-- новилось в задатчл хе 28 предваря:- тельно уста,:-;с;влива,ется в арифкетнче KoJ f блоке 34 через блок 39 щгфровых , величине Шггиидель 5 все еще ,т;родр.}(-- жает вращаться со скоростью вращени Vg. и в MoMeiiT времени tu (положение (4) на фиг, 5) позорачиваегея
, -числу п )-тульсов обратной , Поэтому в момент времени ti нне бло1са ,34 становитея разным .. сигнал FR ггрикс-дпт к состояви;) 1 и достигаетея соетсшвие т е верто51 последовзтел.лоети. Переключа re.iE,b 26 реагирует на состояние 1 сигнала FR переклиучением его ,-:онта,кта
от S
к
в силу чего переключает-
ся о-Т регулирова}гкя числа оборотов (скорости вращения) к управлению но- ложсаием. Одновременно цифровое вг-г- ражение а, которое было установлено в регистре 33, предварительно уста- , навливается в блоке 34 через блок 39 ,цифровьк величин. Следует отметить.
что величина а эквивалентна числу импульсов обратной сз-яз л соответствующему приблизительно ISC поворота шпинделя. Команда - :исла оборотов OVCMD в момент времекн t, становится
равной нулю,
Цифроаналоговый преобразователь 36 образует нал позипиониого рассогласования PER напряжения, пропорционального .лсдержаннго, арифметического блока 34, и приводной двигатель шпинделя б продо.пл ;ает вращаться в прямом нагфавлении с ч:ислом оборотов, которое- теперь соответствует сигналу PER.
В соответствии с правлением положения, содержание блока 39 считается
обратном напряълеикя кая.дый раз,
когда i eHeyi/ipyeTCH имнулье обратной
связи FBP, 3 результате выходное на-
пряжепяе 1;л Ьро5,л1а.}|огоь.ого npeoujjaso- вателя 36 noc ieriejiHO понижается, фак- т,15:ческое число оборотов AV приводного ,лвигателя шпинделя 6 уменылается 3 еоотзе сгвни с ьыходным еиг,налом
цифроапа. :1реоС-разовате,гШг Когда шпи 1Д1;,17ь поворачивается на У 1 ол () (приблизи:1 е;,хьно tSO ), содержг1ние блока 34 становится равным нулю (FR ,дос:тигает состоянияг Ч ),
а, вентильная схема Н 40 иосалает снг- , за-ве;:.,я ориентации ORED ройс гву Ik. иифроБ ; го управленияэ чтобы прекратить оппрапига управления оркентячией,
ентацией ОКСМ : входит х состС Ягчгю 1 во вра:;К;-ия цнтинпелл в прямом направлеир-и, Эта операция проис- ;:voдит почти так же; даже когда ко -5анда ORCM приходит к состоянию 1, ко врем Г враще,ия )Н липдел,я: в обратном направлеуп-и Во из этих .случаев факт,нчесхое число обосо- тов ишкиделя AV .-- егьтетсЯу как это угоказаво прерывг;стсй линией на фкг,4,, причем- лпиндель ,5 ос ,г;- авливаетея определяемом ко; дчцой ПИИ вращения,
Операцт я управления происходит так же3 если Ц1пинд2,,ь 5 нахо,,цится в состоянии покоя, Korria команда opsr- ентации ORCM приходит в состояние. Изменение фактического числа оборо- гоз ш,пин,целя AV для этого сыпучая показано ни фиг, 5, ,
Та-ким образом., прквоп,ной ,дзига-- тель обеспечивает возможность штгинде- лю вращаться с определяемой ког- 1э.я- до й скоростью к останавли11
12
ваться в любом требуемом положении вращения. Использование только приводного двигателя одного шпинделя понижает общую, стоимость устройства, а также уменьшает его размеры. Можно использовать стандартное устройство цифрового управления без модификации. Кроме того, шпиндель может ориентироваться непрерывно без возврата в исходное положение и без временной остановки, даже когда операция управления ориентацией осуществляется во время вращения шпинделя. Более того, эта операция управления может осуществляться вне зависимости от направления, в котором вращается шпин дель. Эти преимущества сильно сокращают время, требуемое для установки шинл,еля в положение обработки. Опе- ради; точной ориентации происходит быстро, т,к. регулирование скорости вращения осуществляется вплоть до точки, не достигающей предписанного числа градусов определяемого командой положения остановки, при управлении положением, действующем от предписанной точки впереди. Не требуется датчик исходного положения, вне зависимости от того, что положе8316
12
ние остановки СР определяется командой на основе исходного положения, в результате устройство еще более удешевляется. Несмотря на то, что . . угол М, измеряемый от .положения RTSP, в котором генерируется сигнал одного оборота, к исходному положению MRP отличается в зависимости от того, kaким образом монтируется ротационto ное кодирующее устройство, или его эквивалент, число импульсов, сооТ . ветствующих углу М, предварител.ьно устанавливается в задатчике 32 после того, как этот угол предвари,5 тельно измеряется. Это упрощает операции подачи команд и управления, связанные с положением остановки, поскольку размер угла М не нуждается в рассмотрении во время упомянутых
20 операций.
Предлагаемое устройство можно модифицировать. Например, можно генерировать 4096 и myльcoв положения посредством использования ротационного
25 кодирукщего устройства, генерирующего 1024 импульса положения во время одного полного оборота шпинделя, и использования схемы учетверения вместо датчика 9 (фиг. 2).
3 f
I I
Фигл
T jTFTfT 5fl;M.
l - SHsVcp , j
I JTITi
.,.„1.111.;
,.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления остановом шпинделя в заданном положении | 1980 |
|
SU1175357A3 |
| Система управления для остановки шпинделя в определенном угловом положении | 1980 |
|
SU1308185A3 |
| Устройство для остановки шпинделя в заданном положении | 1980 |
|
SU1148555A3 |
| Устройство для останова шпинделя в заданном положении | 1980 |
|
SU1165226A3 |
| Система управления шпинделем | 1978 |
|
SU724081A3 |
| Система управления шпинделем | 1978 |
|
SU831060A3 |
| Асинхронный электропривод | 1981 |
|
SU1327806A3 |
| Устройство для управления асинхронным двигателем | 1979 |
|
SU1192641A3 |
| Электропривод переменного тока | 1980 |
|
SU1114358A3 |
| Промышленный робот | 1981 |
|
SU1149860A3 |
iO
fr.
mfw / i
WP
аг.З
ОКЕЛ
онсм
ovcm
VDRJ
y
Йгг.5
(5;
Фиг.6
(2)
W)
Фаг.1
$
D
Фаг. 8
1 ) I
4,
.,.,ff
in.9 .
)
Составитель В.Поветкин Редактор М.Циткина Техред М.Ходанич Корректор О.Луговая
Заказ 5044/60 Тираж 8.26 Подт1с ю.е BHHHnii Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж--35, Раушская наб,, д, 4/5
Производственно-полиграфическое предприяти.е, г.Ужгород, ул.Проектная,, 4
| Патент по заявке № 2994157/25-08, с конвенционным приоритетом от 9 октября 1976 г по заявке № 130154/78, поданной в патентное ведомство Японии. |
