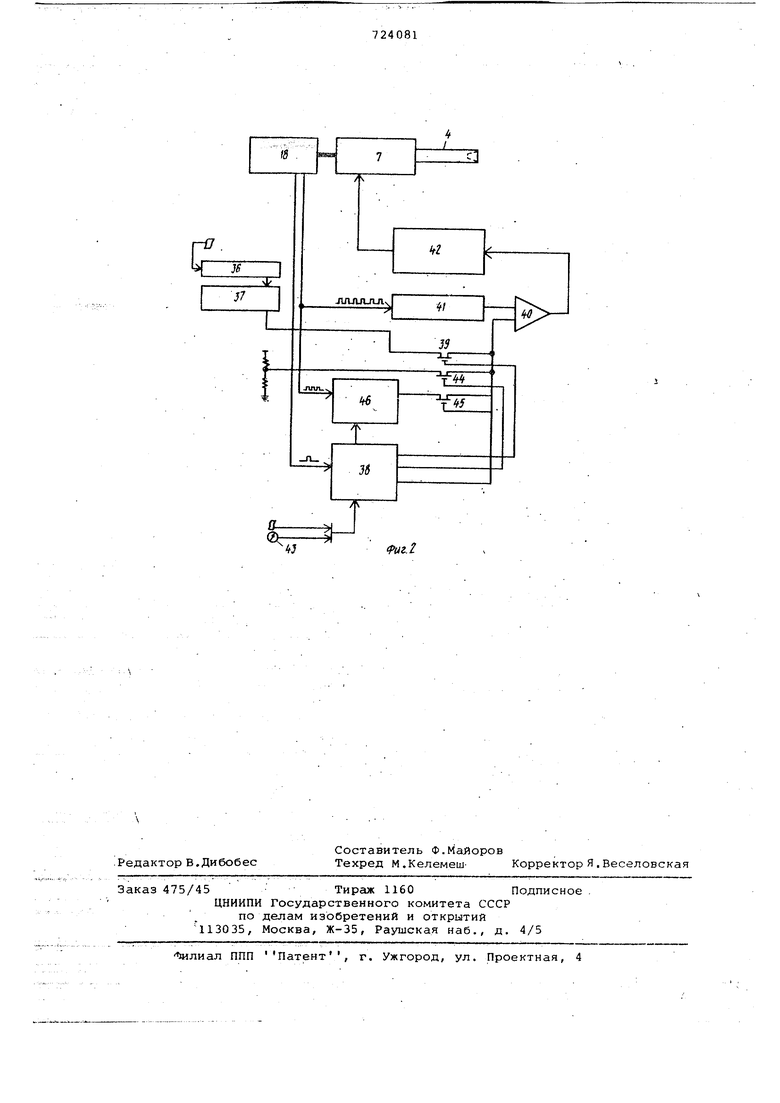
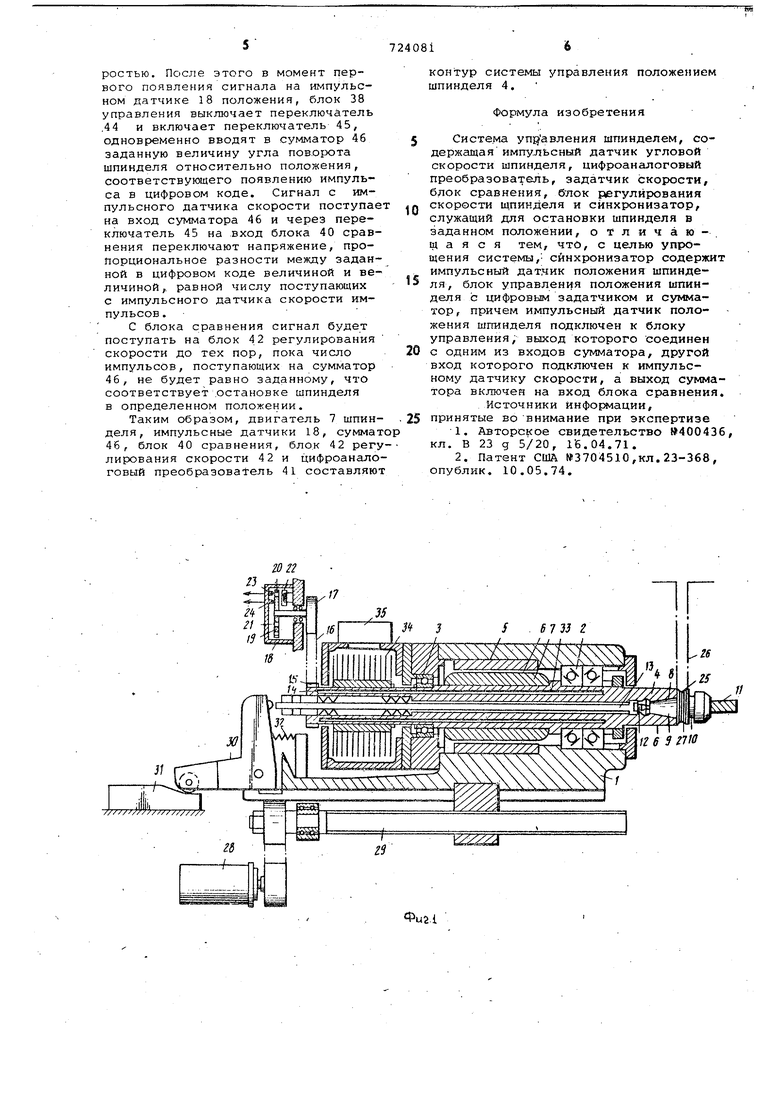
, зацепляется с верхним торцовым участком тяги 13, расположенной в пустотелой части шпинделя. Так как тяга 13 натягивается посредством вогнутой пружины 14 влево, то резец II закрепляют на шпинделе .4 в положении, показанном на фиг,1, Таким образом, при вращении двигате ля шпинделя резец 11 приводится в действие. На левом торцовом участ ке шпинделя 4 установлен синхронный шкив 15 для управления скорость вращения шпинделя 4 и оставки его S определенном положении, причем шкив соединен с помощью синхронных ремней 16и 17 с импульсным датчико 18 скорости и положения шпинделя. - - -, ., - В качестве импульсного датчика скорости И положения шпинделя используется диск 19 с прорезями, при чем диск имее.т множество проре-зей 20, преобразованных в канале на одном диаметре диска с заранее зада ными интервалами и одну прорезь 21 в Канале на другом диаметре. Напротив источника 22 света расположены два фЬтоэлемента 23. и 24, перед которыми расположен диск 19с проре ,5Мй.л-.,,95Р.э 1емент 23 .является соста ной частью импульсного датчика скорости, он создает сигнал в виде последовательности импульсов при повороте шпинделя 4 на один оборот Фот.оэлемент 24 является составной частью импульсного датчика положения шпинделя 4, он создает единственн111й импульс, соответствующий о iipe Делен ному угловому положению при повороте шпинделя на один оборо На фиг,1 показано заранее задан. но.е .п.оложёние шпинделя, в котором он останавливается. Для снятия резц 11со шпинделя 4 элемент 25, снабженный пазаМ1 для поддержания резца ,в магазине 26 для хранения инструмента, перемещается перпендикулярно резцедержателю 10 для зацепления с круговым пазом 27 резцедержателя. Затем передняя бабка 1 перемещается влево приводом подачи, состоящим из двигателя 28 и ходового ййнта 29, посредством которого коленчатый рычаг 30 повбрачивае ся по часовой стрелке вокруг вала с помощью плоского кулачка 31, преодолевая усилие пружин 32 и проталкивая левый конец тяги 13 к шпинделю вправо, В реЭультатё ЭТОГО натяжной штиф 12резцедержателя 10 освобождается от стопорения-с помощью тяги 13, и резец 11 и резцедержатель 10 поме щаются в. магазин 26 и Шпиндель 4 отдельно от резцедержателя 10 перемещается влево. Резец 11 фиксируетс для предотвращения его поворота в м газине 26 , КроЯе того, в случае использования в последствии резца 11 после то как шпиндель 4 остановится в определенном угловом положении вращения, передняя бабка 1 перемещается вправо для зацепления шпинделя 4 с резцедержателем 10, а натяжной штифт 12 стопорится тягой 13, В результате этого резец 11 и шпиндель 4 всегда.взаимно зацепляются при одном и том же угловом соотношении. Для охлаждения шпинделя 4 служит трубопровод 33, радиаторные пластины 34 и двигатель 35 вентилятора для охлаждения. Система управления шпинделем содержит задатчик скорости,образованный регистром 36 (фиг,2) и цифроаналоговым преобразователем 37, блок 38 управления положением шпинделя с цифровым задатчиком, переключатель 39, через который сигнал с задатчика скорости поступает на блок 40 сравнения, на второй вход которого через цифроаналоговый преобразователь 41 подается сигнал с импульсного датчика скорости. Скорость вращения шпинделя регулируют блоком 42, Сигнал на останов шпинделя подается от раммной ленты или ручного переключателя 43, Через переключатель 44 подают на блок 40 сравнения заданного напряжения малой скорости, а через переключатель 45 подключает к блоку 40 сравнения выход сумматора 46 , . -х. В случае управления скоростью вращения шпинделя 4 заданная скорость записывается на программную ленту, величина этой скорости хранится в регистре 36 и преобразовывается цифроаналоговым преобразователем 37 задатчика скорости в -аналоговое напряжение. С другой стороны, блок 38 управления создает управ- . ляющий сигнал только .для . включения переключателя 39, через который заданное напряжение прикладывают к одной входной клемме блока 40 сравнения. Сигнал датчика 18 скорости, соединенногос двигателем 7 шпинделя 4,. преобразовывается цифроаналоговым преобразователем 41 в аналоговое напряжение, пропорциональное скорости двигателя. Это напряжение прикладывают к другой входной клемме блока 40 сравнения. Блок 40 сравнивает приложенные напря.жения и управляет фазой пускового сигнала блока 42 регулирования скорости так, чтобы приравнять данную скорость двигателя шпинделя к заданной скорости. При подаче сигнала на остановку двигателя в определённом положении от программной ленты или ручного переключателя 43 блок 38управления включает переключатель 44 и выключает ггереключатель 39для того, чтобы ггодать заданное напряжение малой скорости isa блок 40 сравнения и перевести двигатель 7 на вращение с этой скоростъю. После этого в момент первого появления сигнала на импульсном датчике 18 положения, блок 38 управления выключает переключатель ,44 и включает переключатель 45, одновременно вводят в сумматор 46 заданную величину угла поворота шпинделя относительно положения, соответствующего появлению импульса в цифровом коде. Сигнал с импульсного датчика скорости поступае на вход сумматора 46 и через переключатель 45 на вход блока 40 сравнения переключают напряжение, пропорциональное разности между заданной в цифровом коде величиной и величиной,, равной числу поступающих с импульсного датчика скорости импульсов .
С блока сравнения сигнал будет поступать на блок 42 регулирования скорости до тех пор, пока число импульсов, поступающих на сумматор 46, не будет равно заданному, что соответствует .остановке шпинделя в определенном положении.
Таким образом, двигатель 7 шпинделя, импульсные датчики 18, суммат 46, блок 40 сравнения, блок 42 регу лирования скорости 42 и цифроаналоговый преобразова±ель 41 составляю
контур системы управления положением шпинделя 4.
Формула изобретения
Систе.ма уп авления шпинделем, содержащая импульсный датчик угловой скорости шпинделя, цифроаналоговый преобразователь, эадатчик скорости, блок сравнения, блок Е«гулйрования скорости щпинделя и синхронизатор,
0 служащий для остановки шпинделя в заданном положении, отличаю-. Ill а я с я тем, что, с целью упрощения системы,- синхронизатор содержит импульсный датчик положения шпиндеSля, блок управления положения шпинделя с цифровым задатчиком и сумматор, причем импульсный датчик положения шпинделя подключен к блоку управления, выход которого соединен
0 с одним из входов сумматора, другой вход которого подключен к импульсному датчику скорости, а выход сумматора включен на вход блока сравнения.
Источники ИнфоЕяиации,
5 принятые во внимание при экспертизе
1.Авторское свидетельство №400436, кл. В 23 g 5/20, 15.04.71.
2.Патент США №3704510,кл.23-368 , опублик. 10.05.74.
| название | год | авторы | номер документа |
|---|---|---|---|
| Аналого-цифровое устройство для управления токарным станком | 1980 |
|
SU947830A1 |
| Устройство для управления дроблением стружки на токарных станках с программным управлением | 1983 |
|
SU1111132A1 |
| Система экстремального регулирования амплитуды вибраций на металлорежущем станке с выдвижным шпинделем | 1985 |
|
SU1352453A1 |
| Система управления для остановки шпинделя в определенном угловом положении | 1980 |
|
SU1308185A3 |
| УСТРОЙСТВО ДЛЯ ОБТОЧКИ КРИСТАЛЛОВ | 1991 |
|
RU2030998C1 |
| Устройство для обучения работе на металлорежущих станках | 1982 |
|
SU1051558A1 |
| Система управления укладкой в стопу эластичных листов | 1985 |
|
SU1265698A1 |
| Устройство для управления токарнымСТАНКОМ | 1979 |
|
SU830314A1 |
| Фотогравировальное устройство | 1982 |
|
SU1076306A1 |
| Многодвигательный электропривод | 1990 |
|
SU1734185A1 |