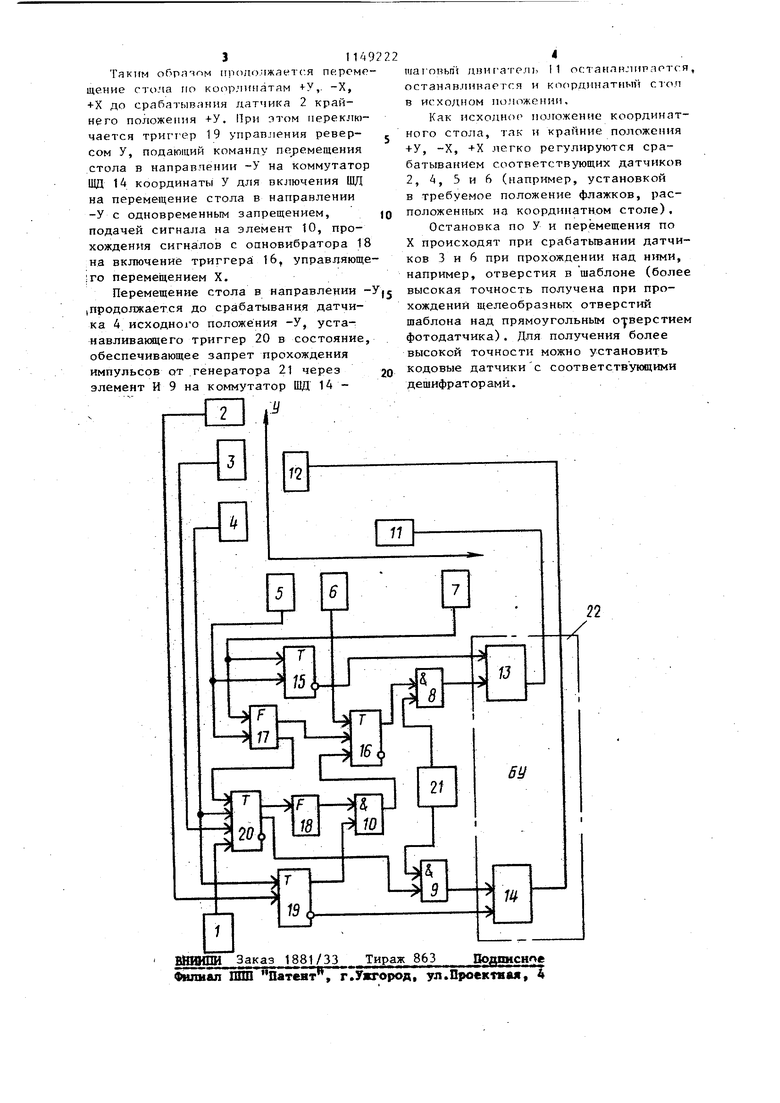
Изобретение относится к автомати ческому управлению и регулированию предназначено для использования в системах автоматического управления координатными столами устройств сбо ки и монтажа, программного управления станками и т.п. Цель изобретения - повьшение надежности, снижение трудоемкости программирования.. На чертеже представлена структур ная схема устройства. Устройство содержит элемент 1 запуска, датчики координат в зонах расположенные на координатном столе в том числе датчик 2 крайнего положения +У, датчик 3 остановки по У, датчик 4 исходного положения - У, второй датчик 5 крайнего положения X, датчик 6 остановки перемещения X первый датчик 7 крайнего положения +Х (исходное положение), первый 8, второй 9 и третий Ю элементы И, шаговые двигатели (ШД) 11 и 12 по координатам X и У, расположенные на координатном столе, ко14мутаторы ШД 13 и 14 по координатам X и У, триггер 15 управления реверсом X, соединенный с триггером 16 управлен перемещением X, первый 17 и второй одновибраторы, триггер 19 управлени реверсом У, триггер 20 управления перемещением У, генератор 21 импуль сов и блок 22 управления. Устройство работает следующим образом. По команде из элемента 1 запуска при наличии.сигнала от датчика 4 исходного положения У триггер 20 управления перемещением У вьщает команду на элемент И 9, который раз решает прохождение импульсов от ген ратора 21 на коммутатор ШД 14 координаты У и далее на шаговый двигатель У 12, при этом стол перемещает в направлении координаты -i-y до полу чения триггером 20 сигнала от датчи ка 3 остановки по У (например, при засвечивании фотодиода отверстием в шаблоне). Триггер 20 переключаетс запрещая прохождение импульсов от генаратора 21 через элемент И 9, и через одновибратор 18 и элемент И устанавливает триггер 16 управления перемещением X в состояние, разрешающее прохождение импульсов через элемент И 8 от генератора 21 на коммутатор ШД 13 координаты X и далее на шаговый двигатель координаты X 11, при этом стол перемещается в направлении - X от датчика 7 крайнего положения +Х (исходное) до Срабатывания датчика 6 остановки перемещения X, устанавливающего триггер 16 в положение запрета прохождения импульсов через элемент И 8, в результате движение стола прекращается до окончания выполнения технологической команды с последующей установкой триггера 16 в положение перемещения по X. При срабатывании датчика 5 крайнего положения -X прохождением сигнала через одновибратор 17 переключается триггер 16 управления перемещением X, запрещая прохождение импульсов от генератора 21 через элемент И 8, при этом переключается и триггер 15 управления реверсом X с подачей команды на коммутатор ШД 13 о подготовке к перемещению в направлении . Через одновибратор 17 импульсный сигнал поступает также на вход триггера 20 управления перемещением У, который устанавливается в состояние, обеспечивающее прохождение сигналов через элемент И 9 от генератора 21 на коммутатор ШД 14 координаты У. Стол шаговым двигателем 12 перемещается в направлении +У до очередного срабатывания датчика 3 остановки по У. При этом аналогично переключается триггер 20, обеспечивая прекращение импульсов от генератора 21 на коммутатор ИЩ 14 координаты У, и устанавливается в положение прохождения импульсов от генератора 21 на коммутатор ЩД 13 координаты X триггер 16 управления перемещением X, стол перемещается в направлении +Х до срабатывания датчика 6, котор.1й переключает триггер 16 в положение запрета прохождения импульсйв через элемент И 8. По окончании технологических операций соответствующей командой триггер 16 переключается в положение разрешения перемещения в направлении 4-Х. При срабатывании датчика +Х 7 импульсом с одновибратора 17 аналогично изложенному переключаются триггер 16 управления перемещением X, триггер t5 управления реверсом X и триггер 20 управления перемещением У - перемещение стола в направлении +Х прекращается и идёт перемещение в направлении +У до очередного срабатывания датчика 3 остановки по У. 3114 Таким обрпчом пп(1Ло.;1жлетс.я переме щение сто.ча по коор.чияатям +У,. -X, +Х до срабатывания датчика 2 крайнего положения +У. При этом переключается трипер 19 управления реверсом У, подающий команду перемещения стола в направлении -У на коммутатор ШД 14 координать У для включения ЦЩ на перемещение стола в направлении -У с одновременным запрещением, подачей сигнала на элемент 10, прохождения сигналов с опновибратора 18 на включение триггера 16, управляюще ;го перемещением X. Перемещение стола в направлении продолжается до срабатывания датчика 4 исходного положения -У, устанавливающего триггер 20 в состояние, обеспечивающее запрет прохождения импульсов от генератора 21 через элемент и 9 на коммутатор ПЩ 14 iiiaioKbrit дннгатр.П, II остаканлираптся, останавливается и координатный CTCLH в исходном положении. Как исходное положение координатного стола, так и крайние положения +У, -X, +Х легко регулируются срабатыванием соответствующих датчиков 2, 4, 5 и 6 (например, установкой в требуемое положение флажков, расположенных на координатном столе), Остановка по У и перемещения по X происходят при срабатьгеании датчиков 3 и 6 при прохождении над ними, например, отверстия в шаблоне (более высокая точность получена при прохождений щелеобразных отверстий шаблона над прямоугольным отверстием фотодатчика). Для получения более высокой точности можно установить кодовые датчикис соответствующими дешифраторами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для двухкоординатного управления | 1986 |
|
SU1365051A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1982 |
|
SU1062487A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 1997 |
|
RU2125762C1 |
| Устройство для допускового контроля паяных соединений на печатных платах | 1987 |
|
SU1539694A1 |
| Устройство для считывания графической информации | 1976 |
|
SU628507A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Программно-управляемый модуль | 1986 |
|
SU1403018A1 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1721783A1 |
| Биотехническое адаптируемое устройство для бесклавишного ввода информации | 1987 |
|
SU1576901A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
УСТРОЙСТВО ДЛЯ ДВУХКООРДИНАТНОГО УПРАВЛЕНИЯ, содержащее элемент запуска, датчики координат X и У в зонах, первый элемент И, шаговые двигатели по координатам X и У, входа которых соединены с выходами блока управления, первые входы которого соединены с выходами второго и третьего элементов И, а также датчик исходного положения, датчик крайнего положения по У, первый и второй датчики крайнего положения по X, датчик остановки по У, датчик остановки перемещения по X, о т л и ч аю щ е е с я тем, что, с целью повышения надежности устройства и снижения трудоемкости программирования, в него введены генератор импульсов, триггер управления реверсом по X, три;ггер управления реверсом по У, последовательно соединен 1ые первый одновибратор, триггер управления перемещением по У и второй однонибратор, а также триггер управления перемещением по X, прямой выход которого подключен к первому входу второго элемента И, соединенного вторым входом с первым выходом генератора импульсов, второй выход которого соединен с первым входом Третьего элемента И, подключенного вторым входом к прямому выходу триггера управления перемещением по У, второй вход которого подключен к выходу элемента запуска, третий вход - к выходу датчика остановки по У, четвертый вход - к выходу датчика исходного положения и к первому входу триггера управления реверсом по У, соединенного вторым входом с выс Q ходом датчика крайнего полоя ения по У, прямым выходом через первый (Л элемент И - с первым входом триггера управления перемещением по X, а инверсным выходом - с вторым входом блока управления,, третий вход которогоподключен к инверсному выходу триггера управления реверсом по X, выход второго одновибратора соединен с вторым входом первого элемента И, второй выход первого одновибратора подключен к второму входу триггера управления перемещением по X, третий вход которого соединен с выходом датчика остановки Перемещением по X, выход первого датчика крайнего положения по X подключен к первым входам первого одновибратора и триггера управленкя реверсом по X, соединен- ,ных ВТОР11&4И ВХОДШ4И С ВЫХОДОМ второго датчика крайнего положения по X.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Газовое фотореле | 1942 |
|
SU63874A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для двухкоординатного управления | 1978 |
|
SU702349A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
