Изобретение относится к б бласти автоматического управления и регулирования и предназначено для использования в системах автоматического монтажа, сборки, программного управления станками и т.п.
Телыо изобретения является повышение производительности работы устройства за счет дополнительного позиционирования нечетного ряда по коордиа- те Y.
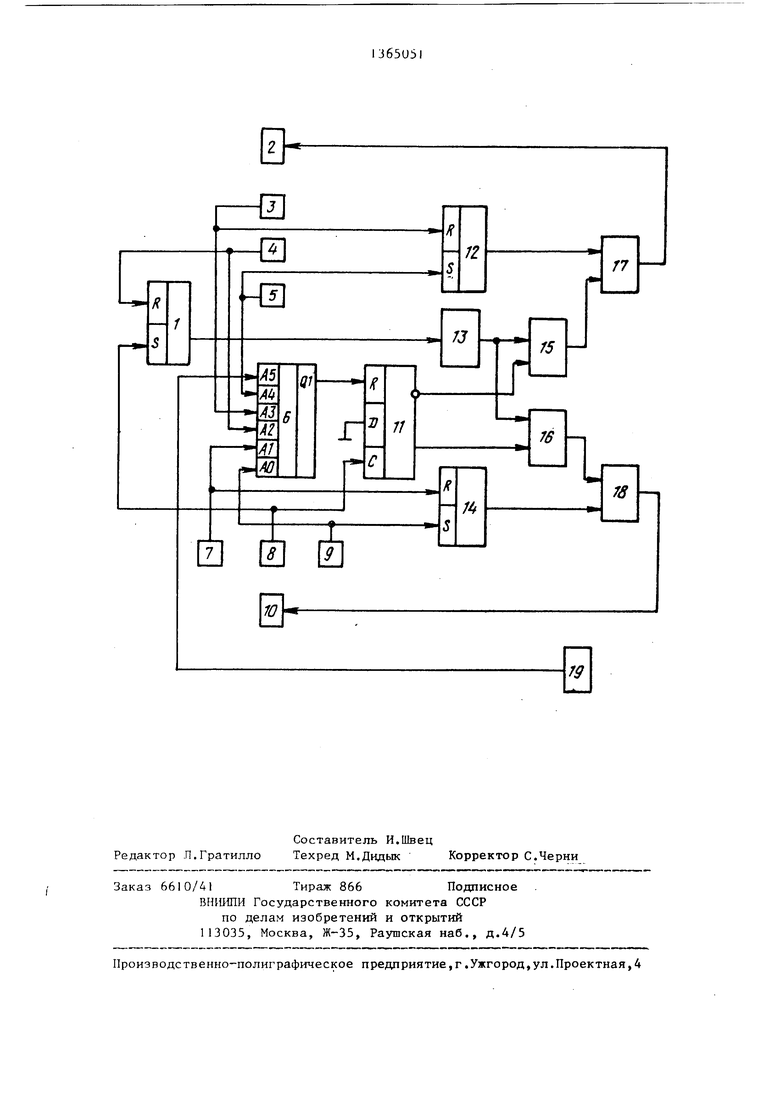
На чертеже представлена структурная схема устройства.
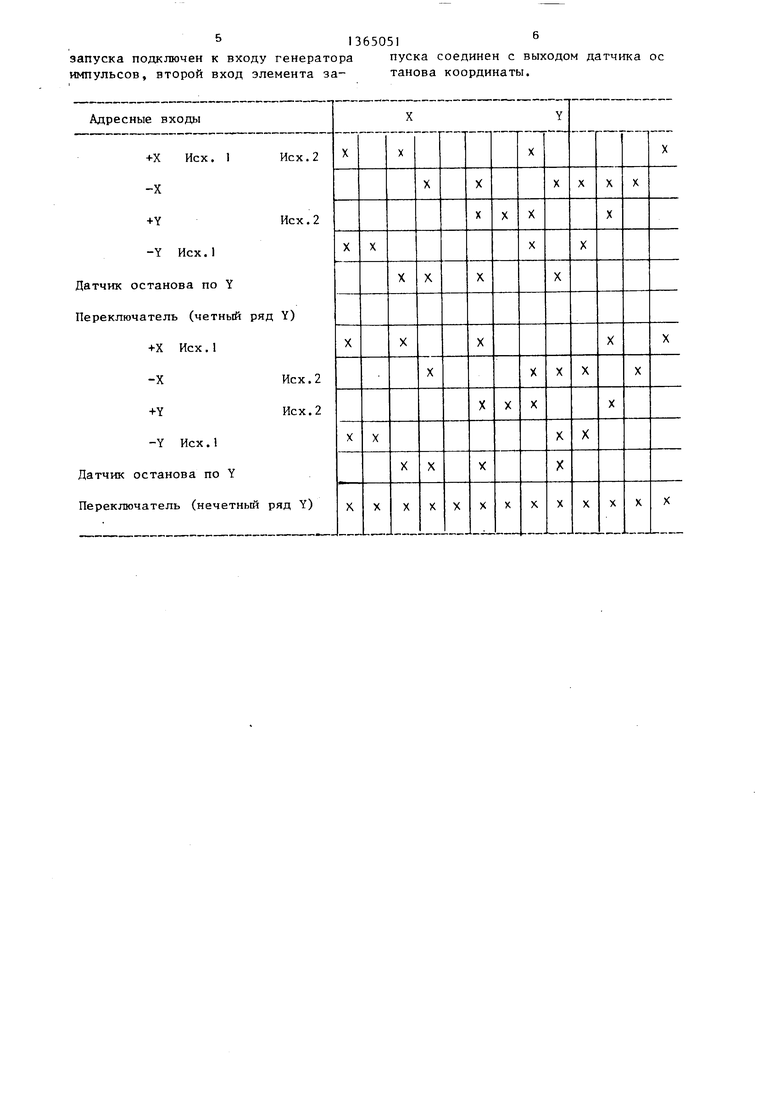
Дешифратор 6 крайних зон перемещения предназначен для анализа входных сигналов от датчиков конечного положения координат +Х, -X, +Y, -Y, сиг.
нала от датчика 4 останова по координате У, переключателя 19 и на основании этого анализа выдается разрешение либо на движение по координате X,
либо по координате У. Различные ситуации, которые возникают при перемещении координатного стола, сведены в таблицу.
Дешифратор 6 наиболее просто реа
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
| Машина для затяжки заготовки обуви на колодку | 1987 |
|
SU1412719A1 |
| Устройство для двухкоординатного управления | 1983 |
|
SU1149222A1 |
| Устройство для управления сборочным роботом | 1980 |
|
SU875331A1 |
| Устройство для программного управления позиционного типа | 1983 |
|
SU1158976A1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| Устройство для управления дроблением стружки на токарных станках с программным управлением | 1983 |
|
SU1111132A1 |
| Установка для разрезания групповых пакетов монолитных керамических конденсаторов | 1990 |
|
SU1806369A3 |
| Устройство для управления шаговым двигателем | 1989 |
|
SU1686691A1 |
| Устройство для сварки | 1987 |
|
SU1459842A1 |
Изобретение относится к области автоматического управления и регулирования и предназначено для использования в системах автоматического монтажа, сборки, программного управления станками и т.п. Цель изобретения - повьппение производительности устройства за счет дополнительного позиционирования по координате нечетного ряда. Устройство для двухкоординатного управления содержит триггер запуска, шаговые двигатели по координатам, датчики крайних положений по координатам X и Y, датчик останова по X, по Y, депшфратор крайних положений, D-триггер координат X и Y, RS-триггеры направлений, генератор импульсов, элементы И, коммутаторы и переключатель. Данное устройство позволяет при определенном шаге позиционирования по координате Y для одного и того же максимального перемещения разместить еще один ряд (нечетный) на этой координате, снизив Tek самым частоту смены кассеты. 1 ил., 1 табл. СЛ
Устройство содержит триггер I за- 15 лизуется на микросхеме К556РТУ. На
пуска, шаговый двигатель 2 координаты У, датчик 3 крайнего положения - У, датчик 4 останова по координате У, датчик 5 крайнего положения координаты +У, дешифратор 6 крайних зон 20 шать работу либо с четным или нечет- перемещения, датчик 7 крайнего положения координаты +Х, датчик 8 останова по координате X, датчик 9 крайнего положения -X, шаговый двигатель 10 координаты X, D-триггер 11 координат X и У, RS-триггер 12 направления по координате У, генератор 13 импульсов, RS-триггер 14 направления координаты X, элементы II 15 и 16, комным числом перемещении по координате У.
Датчик 4 останова по координате У и датчик 8 останова по X представ25 ляют собой оптозлектронное устройство, состоящее из источников света, фотодатчиков и шторки с отверстиями, расстояние между которыми равно одному перемещению соответственно по ко-
мутаторы 17 и 18 шаговых двигателей по координатам У и X, переключатель 19.
Триггер 1 запуска выполнен в виде КЗ-триггера, на входы которого поступают сигналы отработки перемещения с 35 подсоединен к общему проводу питания.
датчиков 4 и 8 останова координат X и У, а также команды запуска из системы управления технологическим оборудованием .
П аговый двигатель 2 координаты У и шаговый двигатель 10 координаты X взяты однотипные, например типа ДПШ- 200.
Датчики 3 и 5 крайнего положения координаты У и датчики 7 и 9 крайнего положения координаты X расположены на координатном столе и могут быть вьтолнены в виде контактных микропереключателей или оптоэлектронными с соответствующими флажками.
Точность срабатьюания этих датчиков не влияет на точность перемещения пи в известном, ни в предлагаемом устройствах. Только в предлагаеа сигнал с датчика 8 останова по X поступает на вход синхронизации.
Триггер 11 координат предназначен для разрешения движения по нужной ко-
40 ординате.
Генератор 13 импульсов представляет собой обычный релаксационный генератор прямоугольных импульсов, которые поступают на коммутаторы 17
45 и 18 шаговых двигателей, заставляя его с частотой генератора включать в определенной последовательности обмотки шаговых двигателей, в зависимости от сигнала соответствующих
5Q RS-триггеров 12 и 14 направлений координат X, У.
Коммутаторы 17 и 18 шаговых двигателей выполнены идентично, как коммом устройстве срабатьшание происхо-55 мутаторы фаз для 4-х фазных реверсив- дит в зоне последнего перемещения ных шаговых двигателей, по ряду координат X или У до сраба- Переключатель 19 - общий переклю- тывания соответствующего датчика ос- чатель на два положения типа ПДК или танова.ВДМ, с помощью которого выбирается
адресные входы зтои микросхемы подаются перечисленные сигналы, а включением или отключением еше одного адресного входа можно оперативно разрешать работу либо с четным или нечет-
ным числом перемещении по координате У.
Датчик 4 останова по координате У и датчик 8 останова по X представляют собой оптозлектронное устройство, состоящее из источников света, фотодатчиков и шторки с отверстиями, расстояние между которыми равно одному перемещению соответственно по ко-
ординате У и координате X.
Триггер I1 координат X, У выполнен в виде D-триггера, на установленный вход которого поступает сигнал от дешифратора 6 крайних зон, D-вход
35 подсоединен к общему проводу питания
а сигнал с датчика 8 останова по X поступает на вход синхронизации.
Триггер 11 координат предназначен для разрешения движения по нужной ко-
40 ординате.
Генератор 13 импульсов представляет собой обычный релаксационный генератор прямоугольных импульсов, которые поступают на коммутаторы 17
45 и 18 шаговых двигателей, заставляя его с частотой генератора включать в определенной последовательности обмотки шаговых двигателей, в зависимости от сигнала соответствующих
5Q RS-триггеров 12 и 14 направлений координат X, У.
Коммутаторы 17 и 18 шаговых двигателей выполнены идентично, как ком5
10
15
25
работа с четным или нечетным числом переметения по координате Y,
Устройство работает следующим образом.
Дешифратор 6 крайних зон позиционирования при срабатывании датчиков 5 и 7 крайних положений Y и X установил триггер 11 координат X и Y на разрешение движения по координате X, а направление этого движения определяет триггер 14 при срабатьюании датчика 7 крайнего положения +Х.
Технологическая команда переключает триггер I запуска разрешая тем самым работу генератора 13 импульсов, импульсы которого поступают на коммутатор 18 и далее на шаговый двигатель 10 координаты X. После отработки заданного перемещения датчик 8 ос- 20 танова по X вьщает импульс, который переключает триггер I, останавливая генератор 13 импульсов, в результате чего движение стола прекращается. Одновременно импульс с датчика 8 поступает на триггер 1I координат X и Y, который блокируется сигналом с дешифратором 6 крайних зон перемещения, сохраняя разрешение движения по координате X.
При срабатьшании датчика 9 крайнего положения -X дешифратор 6 крайних зон перемещения снимает запрет с триггера 1I координат X и Y и импульс отработки последнего перемещения с датчика 8 останова переключает его на разрешение движения по координате Y, а триггер 14 направления X изменяет направление движения на противоположное .
Последующая технологическая команда снова переключает триггер 1 пуска, но движение уже происходит по координате У до срабатывания датчика 4 останова. Кмпульс отработки этого перемеще1- ия переключает триггер 1 запуска и через дешифратор 6 крайних зон позигхионирования снова устанавливает триггер 11 координат на разрешение движения по 1 ;оординате X.
Дальнейший процесс перемещения происходит аналогично. Только в зависимости от сигналов датчиков 7 и 9 крайних положений и датчика 3 край30
35
40
45
50
стол полностью готов к движению в обратном направлении. Переключателе I9 выбирается четное или нечетное число перемещений по координате Y.
Для получения более высокой точности позиционирования и возможност перепрограммровать шаг позициониров ния можно использовать по координатам X, Y счетчики с соответствующим перепрограммируемыми переключателями.
Фор-, мула изобретени
Устройство для двухкоординатного управления, содержащее генератор им пульсов, выход которого подключен к первым входам первого и второго эле ментов И, два датчики крайних полож ний по каждой из координат X и Y, датчик остановки по координате Y,да чик остановки по координате X, шаго вые двигатели по координатам X и Y, входы которых соединены с выходом с ответствующего коммутатора, первый вход каждого из которых подключен к выходу соответствующего элемента И, второй вход - к выходу соответствую щего RS-триггера направлений, установочные входы которых соединены с выходами датчиков крайштх положений соответственно координаты X и Y, о личающееся тем, что, с целью повьшения производительности работы устройства за счет дополнительного позиционирования нечетного ряда по координате У, введен тригге запуска, дешифратор крайних зон позиционирования, D-триггер координат и переключатель, выход которого соединен с первым адресным входом дешиф ратора крайних зон позиционирования вторые и третьи адресные входы котор го подключены к выходам датчиков, крайних положений соответственно по координатам X и Y, четвертьш адресный вход - к выходу датчика остановки по координате У, выход дешифратора крайних зон соединен с R-входом В-триггера координат, С-вход которого соединен с первым входом элемента запуска и с выходом датчика остановнего положения координаты -Y соответ- 5 п° ко-ординате У, прямой выход Dствующие триггеры 14 и 12 направле - ния, меняют свои значения.
После последнего срабатьшания датчика В останова по координате X
триггера координат соединен с вторым входом элемента И координаты Y, инверсный выход - с вторым входом элемента И координаты X, выход элемента
5
10
15
25
0
30
35
0
5
0
стол полностью готов к движению в обратном направлении. Переключателем I9 выбирается четное или нечетное число перемещений по координате Y.
Для получения более высокой точности позиционирования и возможности перепрограммровать шаг позиционирования можно использовать по координатам X, Y счетчики с соответствующими перепрограммируемыми переключателями.
Фор-, мула изобретения
Устройство для двухкоординатного управления, содержащее генератор импульсов, выход которого подключен к первым входам первого и второго элементов И, два датчики крайних положений по каждой из координат X и Y, датчик остановки по координате Y,датчик остановки по координате X, шаговые двигатели по координатам X и Y, входы которых соединены с выходом соответствующего коммутатора, первый вход каждого из которых подключен к выходу соответствующего элемента И, второй вход - к выходу соответствующего RS-триггера направлений, установочные входы которых соединены с выходами датчиков крайштх положений соответственно координаты X и Y, отличающееся тем, что, с целью повьшения производительности работы устройства за счет дополнительного позиционирования нечетного ряда по координате У, введен триггер запуска, дешифратор крайних зон позиционирования, D-триггер координат и переключатель, выход которого соединен с первым адресным входом дешифратора крайних зон позиционирования, вторые и третьи адресные входы которо го подключены к выходам датчиков, крайних положений соответственно по координатам X и Y, четвертьш адресный вход - к выходу датчика остановки по координате У, выход дешифратора крайних зон соединен с R-входом В-триггера координат, С-вход которого соединен с первым входом элемента запуска и с выходом датчика остановтриггера координат соединен с вторым входом элемента И координаты Y, инверсный выход - с вторым входом элемента И координаты X, выход элемента
1365051
запуска подключен к входу генераторапуска соединен с выходом датчика ос
импульсов, второй вход элемента за-танова координаты.
Составитель И.Швец Редактор Л.Гратилло Техред М.ДидыкКорректор С.Черни
Заказ 6610/41Тираж 866Подписное
ВИНИЛИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
| Устройство для двухкоординатного управления | 1978 |
|
SU702349A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для двухкоординатного управления | 1983 |
|
SU1149222A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
