Датчики ДЛЯ автоматического управления рабочим циклом шлифования, выполненные в виде трехконтактиой накидной скобы, одна из контактных губск которой находится под воздействием тяги, связанной с амортизатором, известны.
Отличительной особенностью иредлагаемого датчика является снабжение тяги клиновой иоверхностыо для взаимодействия с поиеречным клинО-М, опираЕОЩИМся на клиновую поверхность измерительного штока скобы. Такое выполнеиие клинового датчика обеспечивает нолученпе непрерывного сигнала в виде прямолинейного движения тяги, значительно нревосходящего по величине припуск на сторону заготовки, с нодачей дополнительного сигнала, в результате нарушения клинового соединения тяги и поперечного клина, в виде скачкообразного смеш,енмя тяги : момент достижения требуемого размера изделия.
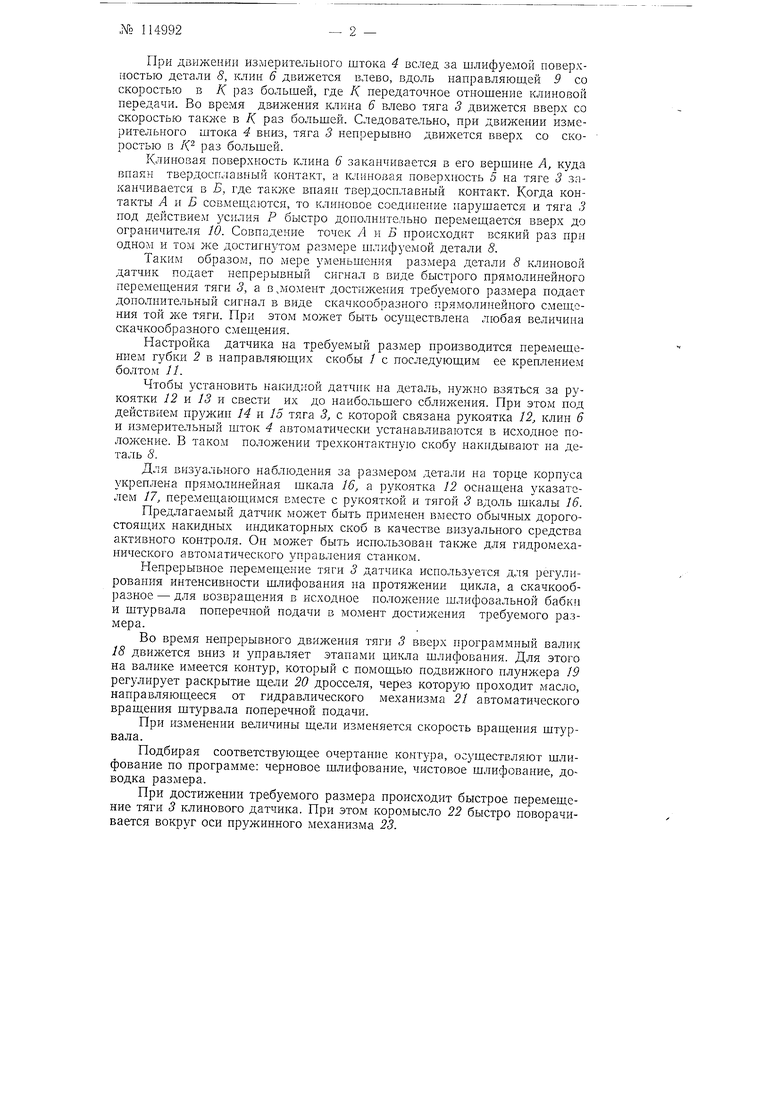
На фиг. 1 показан предлагаемый датчик в разрезе; на фиг. 2 - положение установки его на станке.
Датчик выполнен в виде трехконтактной накидной скобы / с двумя губками, из которых одна губка 2 находится под воздействием тяги 3, связанной с амортизатором, а вторая губка является измерительным штоком 4. Тяга 3 снабжена клиновой поверхностью 5, взаимодействуюш,ей с поперечным клином 6, последний своей клиновой новерхностью опирается на клиновую поверхность 7 измерительного штока 4.
Таким образом, в предлагаемом датчике работает двойная клиновая передача. В рабочем положении, когда скоба / накинута на деталь 6, на тягу 3 действует усилие Р со стороны масляного амортизатора (пружинного механизма), широко применяемого для обычных трехконтактных индикаторных скоб. Усилие Р обеспечивает коитакт рабочих поверхиостей обеих клиновых передач датчика.
,NO 114992- 2 -
При движении измерительного штока 4 вслед за шлифуемой поверхностью детали 8, клин 6 движется влево, вдоль направляющей 9 со скоростью в К раз большей, где /С передаточное отношение клиновой передачи. Во время дв-ижения клина 6 влево тяга 3 движется вверх со скоростью также в К раз большей. Следовательно, при движении измерительного штока 4 вниз, тяга 3 непрерывно вверх со скоростью в /С раз большей.
Клиновая поверхность клина 6 заканчивается в его вершине А, куда впаян твердосплавный контакт, а клиновая поверхность 5 на тяге 3 заканчивается в Б, где также впаян твердосплавный контакт. Когда контакты А и Б совмеш,аются, то клиновое соединение нарушается и тяга 3 под действием усилия Р быстро дополнительно перемеш;ается вверх до ограничителя 10. Совпадение точек А и Б происходит всякий раз при одном и том же достигнутом размере шлифуемой детали 5.
Таким образод, по мере уменьшения размера детали 8 клиновой датчик по71,ает непрерывный сигнал в виде быстрого прямолинейного перемегцения тяги 5, а в .момент достижения требуемого размера подает дополнительный сигнал в виде скачкообразного прямолинейного смеихения той же тяги. При этом может быть осуи1,ествлена любая величина скачкообразного смендения.
Настройка датчика на требуемый размер производится перемешеыием губки 2 в направляющих скобы / с последующим ее креплением болтом //.
Чтобы установить накидной датчгп-с на деталь, нужно взяться за рукоятки 12 к 13 VI свести их до наибольшего сближения. При этом под действием 14 и 15 тяга 3, с которой связана рзкоятка 12, клин 6 и измерительный шток 4 автоматически устанавливаются в исходное положение. В таком положении трехконтактную скобу накидывают на деталь 8.
Для визуального наблюдения за размером детали на торце корпуса укреплена прямолинейная шкала 16, а рукоятка 12 оснащена указателем 17, перемещающимся вместе с рукояткой и тягой 3 вдоль шкалы 16.
Предлагаемый датчик может быть применен вместо обычных дорогостоящих накидных индикаторных скоб в качестве визуального средства активного контроля. Оп быть использован также для гидромеханического автоматического управления стапком.
Непрерывное перемещение тяги 3 датчика используется д;1Я регулирования интенсивности шлифования иа протяжении цикла, а скачкообразное - для возвращения в исходное положение шлифовальной бабки и щтурвала поперечной подачи в момеит достил-сения требз емого размера.
Во время непрерывного движения тяги 3 вверх программный валик 18 движется вниз и управляет этапами цикла щлифовапия. Для этого на валике имеется контур, который с помощью подвижного плунжера 19 регулирует раскрытие щели 20 дросселя, через которую проходит масло, направляющееся от гидравлического механизма 21 автоматического вращения штурвала поперечной подачи.
При изменении величины щели изменяется скорость вращения штурвала.
Подбирая соответствующее очертание контура, осуществляют шлифование по программе: черновое шлифование, чистовое шлифование, доводка размера.
При достижении требуемого размера происходит быстрое перемещение тяги 3 клинового датчика. При этом коромысло 22 быстро поворачивается вокруг оси пружинного механизма 23.
Закрепленный на левом п.чече коромысла нажимной стержень 24 поворачивает рычаг 25 и срабатывает механизм 26 переключения. Последний перемещает золотник 27, имеющийся в гидросистеме станка, после чего масло в гидросистеме получает противоположное движение и шлифовальная головка возвращается в исходное нерабочее положение.
Быстрое и значительное перемещение тяги датчика в момент достижения требуемого размера исключает влияние контактов во всей передающей цепи аа момент приема сигпалс золотииком, устанавливает непосредственную связь между .моментом получения требуелюго размера и моментом отвода шлифовальной бабки в неходкое положение.
Вместе с нажимным стержнем 24 быстро опускается и программный валик 18; плунжер 19 дросселя оказывается в самом глубоком месте контура программного валика, и щель раскрывается на наибольшую величину. Поэтому масло, теперь проходящее через щель в обратном направлении, не встречает ирепятствия и осуществляет с помощью механизма 21 быстрый поворот штурвала ноперечной подачи в исходное положенне.
Предмет изобретения
Клиновой датчик для автоматического управления рабочим циклом шлифования методом врезания на круглошлифовальном станке, выполненный в виде трехконтактной накидной скобы, одна из контактных губок которой находится под воздействием тяги, связанной с амортизатором, отличающийся тем, что указанная тяга контактной губки снабжена клиновой поверхностью для взаимодействия с поперечным клином, опирающимся на клиновую поверхиость измерительного штока скобы, с целью получения непрерывного сигнала в виде прямолинейного движения тяги, значительно превосходящего по величине припуск на сторону аготовки, с нодачей дополнительного сигнала, в результате нарушения клинового соединения, в виде скачкообразного смещения тяги в момент достижения требуемого размера обработанного изделия.
№ 114992