Изобретение относится к активным подвескам транспортны с средств, в частности к устройствам для управления активными подвесками.
Наиболее близкой к предлагаемой по технической сущности и достигаемому результату является система управления активными подвесками транспортного средства, содержащая датчик угла продольного крена, датчик угла поперечного крена, датчик изменения статического веса подрессоренного корпуса транспортного средства и датчики сил, действующих от подвесок колес на корпус транспортного средства, причем выходы последних указанных датчиков соединены с блоками сравнения измеренных значений сил с их заданными значениями.
Недостатками известной системы являются низкое быстродействие и малая точност, что снижает поперечную устойчивость и плавность хода транспортного средства.
Цель изобретения - расщирение функциональных возможностей системы путем обеспечения увеличения поперечной устойчивости транспортного средства при одновременном повышении быстродействия.
Цель достигается тем; что система управления активными подвесками многоосного транспортного средства, содержащая датчик угла продольного крена, датчик угла поперечного крена, датчик изменения статического веса подрессоренного корпуса транспортного средства и датчики сил, действующих от подвесок колес на корпус тран спортного средства, причем выходы последних указанных датчиков соединены с блоками сравнения измеренных значений сил с их заданными значениями, снабжена датчиком скорости движения транспортного средства и датчиком угла поворота рулевого колеса, причем все указанные датчики через низкочастотные фильтры соединены с блоком аналого-цифровых преобразователей, которые совместно с указанными фильтрами и датчиками образуют каналы измерения перечисленных величин, при этом выходы блока аналого-цифровых преобразователей по каналам измерения угла продольного крена и статического веса подрессоренного корпуса соединены с блоком определения продольной устойчивости транспортного средства, связанным с цифроаналоговым преобразователем продольной устойчивости, а выходы блока аналого-цифровых преобразователей по каналам измерения статического веса подрессоренного корпуса, угла поперечного крена, скорости движения транспортного средства и угла поворота рулевого колеса соединены с блоком определения поперечной устойчивости транспортного средства, связанным с цифроаналоговым преобразователем поперечной устойчивости, выход которого соединен напрямую с указанными блоками сравнения сил в активных подвесках колес одного борта и через инвертор с блоками сравнения тех же сил в подвесках колес другого борта, выход цифроаналогового преобразователя продольной устойчивости через промежуточные усилители соединен попарно с блоками сравнения указанных сил в подвесках колес, расположенных по ходу с одной стороны центра подрессоренных масс, а через инвертор и промежуточные усилители попарно соединен с блоками сравнения тех же сил в подвесках колес, расположенных с другой стороны центра подрессоренных масс.
При этом параллельно каналам измерения скорости движения и угла поворота рулевого колеса установлены дифференцирующие звенья, соединенные выходами с аналогоцифровыми преобразователями и образующие каналы измерения продольного ускорения транспортного средства и скорости вращения рулевого колеса.
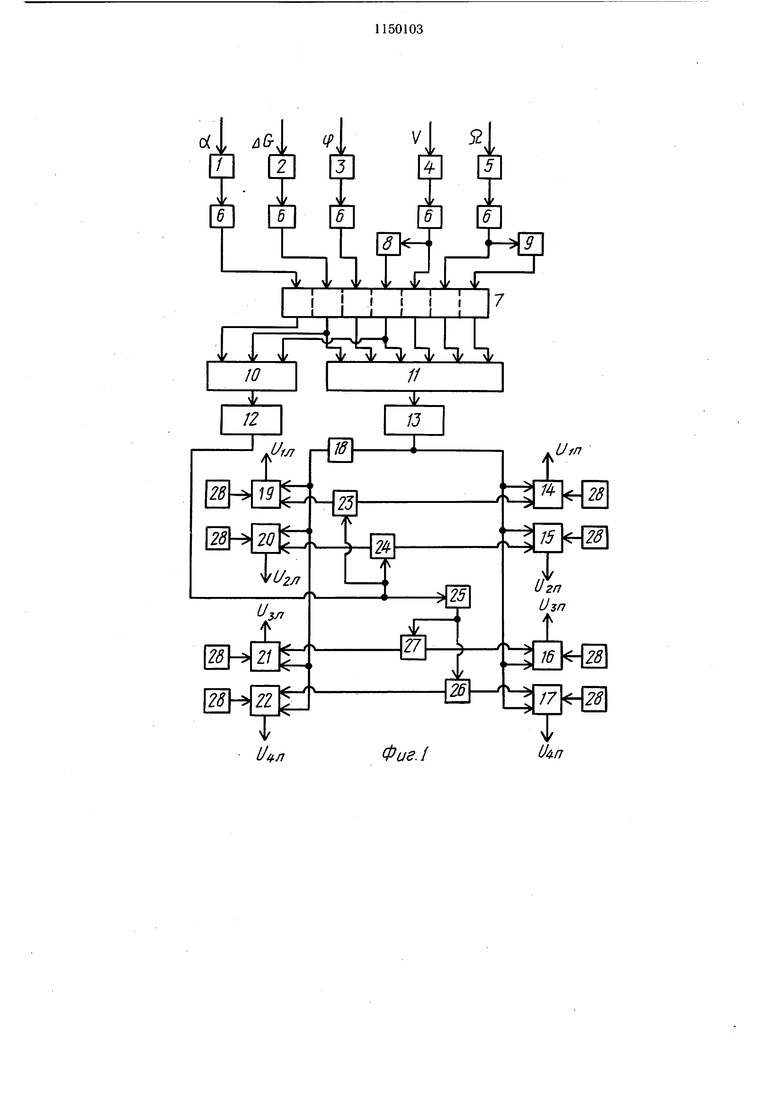
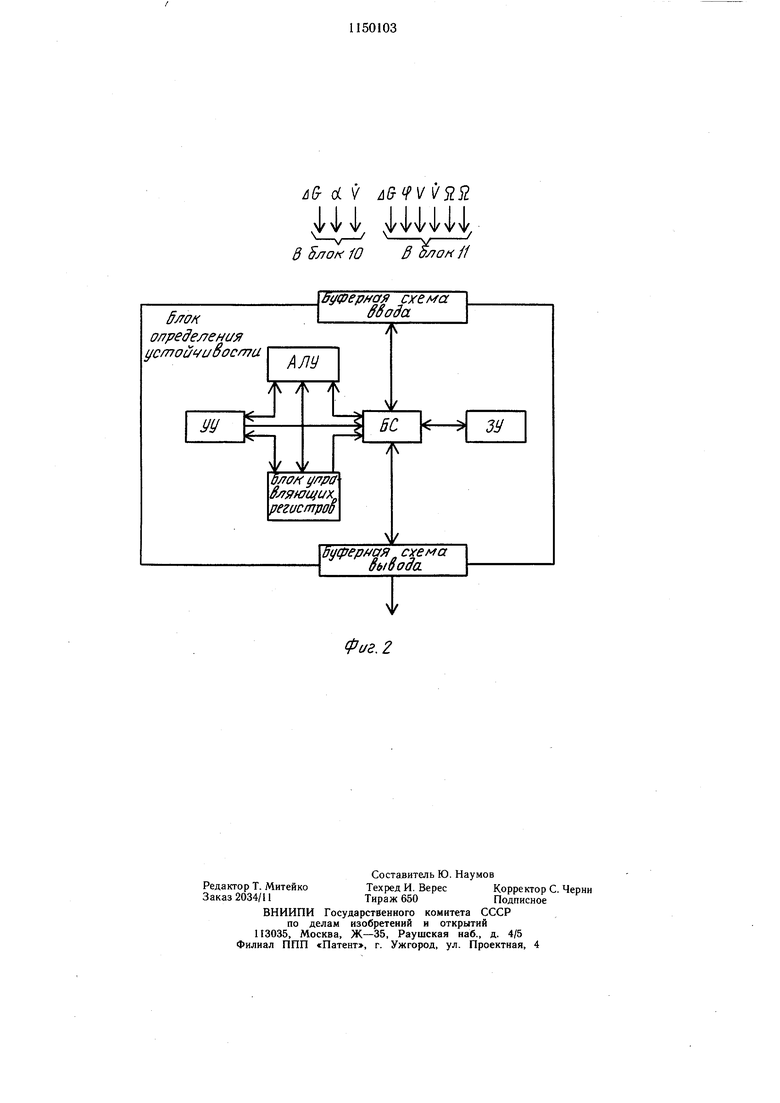
На фиг. 1 изображена система управления активными подвесками многоосного транспортного средства; на фиг. 2 - структурная схема блока определения устойчивости.
Система управления активными подвесками многоосного транспортного средства (фиг. 1) содержит датчик 1 угла ел. продольного крена маятникового типа, датчик 2 изменения AG статического веса подрессоренного корпуса транспортного средства тензометрического типа, датчик 3 угла f поперечного крена транспортного средства маятникового типа, датчик 4 скорости V движения транспортного средства тахометрического типа, измеряющий скорость по числу оборотов вращающихся деталей двигателя или силовой передачи, датчик 5 угла поворота рулевого колеса потенциометрического типа
Выходы датчиков 1--5 через низкочастотные фильтры 6 соединены с входами блока 7 аналого-цифровых преобразователей (АЦЦ).
Для получения сигналов, пропорциональных продольным ускорениям V транспортного средства и угловой скорости Л вращения рулевого колеса, система снабжена дифференцирующими звеньями 8 и 9, входы которых через низкочастотные фильтры соединены с выходами датчиков скорости транспортного средства и угла поворота рулевого колеса, а выходы - с блоком 7 АЦП. Каждый из аналого-цифровых преобразсвателей в блоке 7 совместно с низкочастотными фильтрами 6 и датчиками 1-5, а также дифференцирующими звеньями 8 и 9 образуют каналы измерения перечисленных величин.
В блоке 7 непрерывные сигналы датчиков 1-5 и сигналы, поступающие с выхода дифференцирующих звеньев 8 и 9, преобразуются в дискретный цифровой код, что
повышает точность системы и ее быстродействие.
Выходы АЦП соединены соответственно с блоками 10 и 11 определения продольной и поперечной устойчивости. С блоком 10 определения продольной устойчивости соединены выходы АЦП по каналам измерения угла л. продольного крена, изменения 4 G веса подрессоренного корпуса и продольного ускорения V транспортного средства. На выход блока 11 определения поперечной устойчивости подведены выходы АЦП по каналам измерения изменения веса AG подрессоренного корпуса, угла У поперечного крена, продольных ускорений V и скорости V транспортного средства, угла поворота и угловой скорости поворота ft рулевого колеса.
Блоки 10 и 11 предназначены для вычисления составляющих усилий, действующих на подрессоренный корпус в функции изменения измеряемых параметров по определенным зависимостям, заложенным в их память, и для последующего суммирования величин указанных составляющих усилий. Кроме того, эти блоки предназначены для формирования управляющих сигналов в системе управления при превышении измеряемыми параметрами заданных допустимых значений. Для этого они снабжены соответствующими логическими устройствами или встроенными в память таблицами ситуаций.
Структурные схемы блоков 10 и 11 совершенно аналогичны и отличаются лишь вводами. В блок 10 определения продольной устойчивости вводят измеренные значения ot, дО, V а в блок 11 определения поперечной устойчивости - измеренные значения G, У, V, V,ft ,ft.
Ьлок определения устойчивости транспортного средства представляет собой (фиг. 2) микропроцессор с запоминающим устройством (ЗУ), описанный в источнике информации. Микропроцессор включает в себя буферные схемы ввода и вывода, арифметическо-логическое устройство (АЛУ), устройство управления (УУ), блок связи (БС) и блок управляющих регистров. Запоминающее устройство (ЗУ) включает в себя оперативное запоминающее устройство (ОЗУ) и постоянное запоминающее устройство (ПЗУ), а иногда конструктивно выполняется отдельно от микропроцессора.
В ЗУ находится программа вычисления составляющих сил, действующих на подрессоренный корпус со стороны деталей подвески в зависимости тзт измеряемых параметров.
АЛУ производит логические и арифметические операции над измеренными величинами.
УУ вырабатывает необходимые управляющие сигналы для ввода исходных данных через буферную схему ввода, выборки очередной команды из памяти, дешифровки кода команды, формирования адресов подпрограмм, выборки подпрограмм из памяти, передачи результатов счета из АЛУ в память и через блок связи и буферную схему вывода к внешним устройствам, в рассматриваемом случае ко входу ЦАП.
Блок управляющих регистров предназначен для временного хранения управляющей информации и содержит регистры и счет чики, участвующие в управлении вычислительным процессом.
Блок связи организует обмен информацией процессора с оперативной памятью (ОЗУ), а также с внещним по отношению к микропроцессору оборудованием.
Продольная устойчивость транспортного средства зависит от измеряемых величин ot, &G, V. Очевидно, что при ускоренном движении транспортного средства на подъем оси колес, размещенных сзади центра подрессоренных масс, будут перегружаться по сравнению со случаем равномерного движения по горизонтальной дороге, а оси колес, размещенных впереди центра масс, будут разгружаться. Для двухосного транспортного средства вычисление сил, действующих на подрессоренный корпус от колес передней Z, и задней Zj осей, производят по известным формулам.
Z i -(G +А G) f cos( JlS V - (G+4G)sin«,(1)
Z, (G -b4G) f cosa-f -( V +
-f (G +4G)
(2)
sino.
где G - полный начальный вес транспортного средства;
aj - расстояние от центра масс до передней оси;
аг. расстояние от центра масс до задней оси;
bg - высота центра масс;
L - база транспортного средства;
Л - угол подъема;
V - ускорение транспортного средства;
- ускорение земного тяготения.
По приведенным зависимостям осуществляется вычисление сил в АЛУ блока 10 определения продольной устойчивости.
Поперечная устойчивость транспортного средства зависит от угла поперечного уклона дороги f, изменения веса AG, скорости движения V, ускорения V угла и скорости поворота управляемых колес или угла и скорости si поворота рулевого колеса. АЛУ блока 11 определения поперечной устойчивости определяет суммарную нагрузку на колеса левого 7. л правого Zn бортов по известным зависимостям.
Zji (-i cosy+ ) (G +ДС) +
+ (4sjny-- -cosy) CY,(3)
Zn (созУ-4-siny)(G+AG) + + () CY,(4)
(|Ч|:Ч +
),
где f -угол поперечного уклона дороги;
В - ширина колеи транспортного средства;
Су - поперечная сила инерции, действующая на повороте;
Л - радиус закругления дороги на повороте;
51 - угол поворота рулевого колеса;
ipm- передаточное отношение рулевого механизма.
Блок 10 определения продольной устойчивости связан с цифроаналоговым преобразователем (ЦАП) 12 продольной устойчивости, а блок 11 определения поперечной устойчивости - с ЦАП 13 поперечной устойчивости.
Выход ЦАП 13 поперечной устойчивости напрямую соединен с блоками 14-17 сравнения измеренных значений сил, действуюш,их на подрессоренный корпус с заданными значениями этих сил в подвесках колес одного (на схеме правого) борта, а через инвертор 18 - с блоками 19-22 сравнения тех же сил в подвесках колес другого (левого) борта.
Выход ЦАП продольной устойчивости через промежуточные усилители 23 и 24 попарно соединен с блоками 14, 19 и 15, 20 сравнения сил в подвесках колес, размещенных впереди центра подрессоренных масс соответственно. Одновременно этот же выход ЦАП через инвертор 25 и промежуточные усилители 26 и 27 попарно соединен с блоками 17, 22 и 16, 21 сравнения сил в подвесках колес, размещенных сзади центра подрессоренных масс соответственно.
Входы всех блоков сравнения соединены также с выходами датчиков 28 силы, действующей на подрессоренный корпус со стороны подвесок колес.
Блоки сравнения 14-17 и 19-22 формируют выходные сигналы Ufn по левому борту и Ujnno правому борту. Эти сигналы определяют закон управления силовым приводом активных подвесок.
При движении транспортного средства по неровной дороге в случаях, когда измеряемые датчиками 1-5 параметры не превышают заданных допустимых значений, записан(5) (6) ных в память блоков 10 и 11, датчики 28 формируют суммарный сигнал, зависящий не только от микропрофи ля дороги, но и от параметров uG,ot, У, V, У,Й,Й. С помощью
5 датчиков 1-5, блока 7 АЦП, блоков 10 и 11 определения продольной и поперечной устойчивости производится вычисление составляющих сил по приведенным зависимостям в функции измеряемых параметров AG, ot, У, V, V,,Sl. Сигнал, пропорциональный
0 сумме этих составляющих с обратным знаком, поступает в блоки сравнения 14-17 и 19-22 измеренных величин сил с их заданными значениями и вычитается из сигналов, поступающих от датчиков 28 суммарной силы. Поэтому на выходе из блоков сравнения сил формируются сигналы Uj, Ufr, пропорциональные лищь динамической нагрузке, зависящей только от микропрофиля дороги.
0 При движении транспортного средства по неровной дороге, когда измеряемые датчиками 1-5 величины параметров превосходят допустимые значения, заложенные в память блоков 10 и 11, последние формируют сигнал управления, предназначенный для уменьшения параметра, величина которого превысила допустимую. Так, например, при превышении углом поперечного крена на левый борт допустимого значения блок 11 определения поперечной устойчивости вырабатывад ет управляющий сигнал, при котором подвески колес левого борта растягиваются, а подвески колес правого борта сжимаются, что обеспечивает уменьшение или устранение этого крена.
Предлагаемое устройство системы управления обеспечивает расширение ее функциональных возможностей при одновременном повышении быстродействия.
б& dV j/7 /i/5Z5
,VV V, УФФФФФ,
в Ьло/ 10
буферная
бусрер/ ая ofSMo Sooda бывода.
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления активными подвесками транспортного средства | 1988 |
|
SU1572838A1 |
| Система управления активной подвеской транспортного средства | 1990 |
|
SU1789358A1 |
| СИСТЕМА УПРАВЛЕНИЯ АКТИВНОЙ ПОДВЕСКОЙ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2019438C1 |
| Система управления активными подвесками многоопорного транспортного средства | 1988 |
|
SU1527022A1 |
| ПНЕВМАТИЧЕСКАЯ ПОДВЕСКА | 2010 |
|
RU2441771C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1990 |
|
RU2018453C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2568163C1 |
| СПОСОБ ИСПЫТАНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2014 |
|
RU2573028C1 |
| АНТИШОКОВАЯ ПОДВЕСКА | 2018 |
|
RU2676843C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2568048C1 |
1. СИСТЕМА УПРАВЛЕНИЯ АКТИВНЫМИ ПОДВЕСКАМИ МНОГООСНОГО ТРАНСПОРТНОГО СРЕДСТВА, содержащая датчик угла продольного крена, датчик угла поперечного крена, датчик изменения статического веса подрессоренного корпуса транспортного средства и датчики сил, действующих от подвесок колес на корпус транспортного средства, причем выходы последних указанных датчиков соединены с блоками сравнения измеренных значений сил с их заданными значениями, отличающаяся тем, что, с целью расщирения функциональных возможностей путем обеспечения увеличения поперечной устойчивости транспортного средства при одновременном повышении быстродействия, она снабжена датчиком скорости движения транспортного средства и датчиком угла поворота рулевого колеса, причем все указанные датчики через низкочастотные фильтры соединены с блоком аналого-цифровых преобразователей, которые совместно с указанными фильтрами и датчиками образуют каналы измерения перечисленных величин, при этом выходы блока аналого-цифровых преобразователей по каналам измерения угла продольного крена и статического веса подрессоренного корпуса соединены с блоком определения продольной устойчивости транспортного средства, связанным с цифроаналоговым преобразователем продольной устойчивости, а выходы блока аналого-цифровых преобразователей по каналам измерения статического веса подрессоренного корпуса, угла поперечного крена, скорости движения транспортного средства и угла поворота рулевого колеса соединены с блоком определения поперечной устойчивости транспортного средства, связанным с цифроаналоговым преобразователем поперечной устойчивости, выход которого соединен напрямую с указанными блока.ми сравнения сил в активных подвесках колес одного борта и через инвертор с блоками сравнения тех же сил в подвесках i колес другого борта, выход цифроаналогового преобразователя продольной устойчивос(Л ти через промежуточные усилители соединен попарно с блоками сравнения указанных сил в подвесках колес, расположенных по ходу с одной стороны центра подрессоренных масс, а через инвертор и промежуточные усилители попарно соединен с блоками сравнения тех же сил в подвесках колес, расположенных с другой стороны центра подрессоренных масс. сд 2. Система управления по п. 1, отличающаяся тем, что параллельно каналам измерения скорости движения и угла поворота рулевого колеса установлены дифференцируюпдие звенья, соединенные выходами с со аналого-цифровыми преобразователями и образующие каналы измерения продольного ускорения транспортного средства и скорости вращения рулевого колеса.