Изобретение относится к активным подвескам транспортных средств, в частности к устройствам для управления активными подвесками.
В транспортном машиностроении известна система управления активными подвесками транспортного средства [1], содержащая датчики углов продольного и поперечного кренов, изменения статического веса подрессоренной части транспортного средства, скорости движения угла поворота рулевого колеса, дифференцирующие звенья, низкочастотные фильтры, аналого-цифровые преобразователи, датчики сил, действующих от подвесок колес на подрессоренную часть транспортного средства, блоки определения продольной и поперечной устойчивости, блоки сравнения сил в активных подвесках колес, промежуточные усилители, инверторы, позволяющая расширить функциональные возможности транспортного средства путем обеспечения увеличения поперечной устойчивости транспортного средства при одновременном повышении быстродействия. Однако такая система не позволяет одновременно обеспечивать устойчивость движения в продольном направлении.
Наиболее близкой по технической сущности к предлагаемому решению является система управления активными подвесками многоопорного транспортного средства [2] , содержащая датчик скорости движения транспортного средства, относительных перемещений подрессоренной и неподрессоренной масс правой и левой передней подвески, изменения статического веса транспортного средства, ускорения неподрессоренной массы передней подвески, углов продольного и поперечного крена транспортного средства, а также блоки определения продольной и поперечной устойчивости и аппаратуру сопряжения датчиков и исполнительных органов подвески с этими блоками.
Однако система имеет следующие недостатки. На установившихся режимах при движении транспортного средства по неровной дороге не обеспечивается уменьшение возмущения продольно-угловых колебаний подрессоренной части транспортного средства. Кроме того, на неустановившихся режимах движения (при резком торможении или интенсивном разгоне) система не обеспечивает устойчивость к "клевкам" подрессоренной части транспортного средства. Это приводит к ухудшению плавности хода и устойчивости движения транспортного сpедства, особенно на неустановившихся режимах, а также неравномерному распределению нагрузок, действующих на подрессоренную часть транспортного средства.
Цель изобретения - расширение функциональных возможностей путем повышения плавности хода, устойчивости движения и равномерного распределения нагрузок, действующих на подрессоренную часть транспортного средства.
Это достигается тем, что система управления активными подвесками транспортного средства содержит блок аналого-дискретных преобразователей, выходы которого по каналам измерения сил, действующих от подвесок колес на подрессоренную часть транспортного средства, и выходы блоков продольной и поперечной устойчивости транспортного средства соединены с входами блока равномерного распределения нагрузок между активными подвесками колес, выходы которого в свою очередь соединены с исполнительными механизмами силового привода активных подвесок колес.
На чертеже представлена структурная схема системы управления активными подвесками транспортного средства.
Схема системы содержит датчики 1 и 2 углов продольногоα и поперечногоϕ кренов подрессоренной части транспортного средства, датчик 3 изменения статического веса ΔG подрессоренной части транспортного средства, датчик 4 скорости V движения транспортного средства, датчик 5 сил Pi, действующих от подвесок колес на подрессоренную часть. Число датчиков 5 равно удвоенному числу осей транспортного средства. Выходы датчиков 1-5 через низкочастотные фильтры 6 соединены с входами блока 7 аналого-дискретных преобразователей. Для получения сигналов, пропорциональных продольным ускорениям  транспортного средства, система снабжена дифференцирующим звеном 8, вход которого через низкочастотный фильтр 6 соединен с выходом датчика 4 скорости движения транспортного средства. Каждый из аналого-дискретных преобразователей блока 7 совместно с низкочастотными фильтрами 6, датчиками 1-5 и дифференцирующим звеном 8 образует каналы измерения перечисленных величин. В блоке 7 непрерывные сигналы датчиков 1-5 и дифференцирующего звена 8 преобразуются в дискретный (цифровой) код, что позволяет обеспечить точность системы. Выходы блока 7 аналого-дискретных преобразователей соединены с блоками 9 и 10 определения продольной и поперечной устойчивости и блоком 11 формирования сигналов равномерного распределения нагрузок между активными подвесками колес. С блоком 9 определения продольной устойчивости соединены выходы блока 7 аналого-дискретных преобразователей по каналам измерения углаα продольного крена подрессоренной части, изменения ΔG статического веса и продольного ускорения
транспортного средства, система снабжена дифференцирующим звеном 8, вход которого через низкочастотный фильтр 6 соединен с выходом датчика 4 скорости движения транспортного средства. Каждый из аналого-дискретных преобразователей блока 7 совместно с низкочастотными фильтрами 6, датчиками 1-5 и дифференцирующим звеном 8 образует каналы измерения перечисленных величин. В блоке 7 непрерывные сигналы датчиков 1-5 и дифференцирующего звена 8 преобразуются в дискретный (цифровой) код, что позволяет обеспечить точность системы. Выходы блока 7 аналого-дискретных преобразователей соединены с блоками 9 и 10 определения продольной и поперечной устойчивости и блоком 11 формирования сигналов равномерного распределения нагрузок между активными подвесками колес. С блоком 9 определения продольной устойчивости соединены выходы блока 7 аналого-дискретных преобразователей по каналам измерения углаα продольного крена подрессоренной части, изменения ΔG статического веса и продольного ускорения  транспортного средства. С блоком 10 соединены выходы блока 7 по каналам измерения углаϕ поперечного крена подрессоренной части, изменения ΔG статического веса, продольного ускорения
транспортного средства. С блоком 10 соединены выходы блока 7 по каналам измерения углаϕ поперечного крена подрессоренной части, изменения ΔG статического веса, продольного ускорения  и скорости V движения транспортного средства. На вход блока 11 между активными подвесками колес подведены сигналы с блока 7 по каналам измерения сил Pi, действующих от подвесок колес на подрессоренную часть. Определение сил, действующих на подрессоренную часть транспортного средства, производится по известным зависимостям, заложенным в памяти известного микропроцессора.
и скорости V движения транспортного средства. На вход блока 11 между активными подвесками колес подведены сигналы с блока 7 по каналам измерения сил Pi, действующих от подвесок колес на подрессоренную часть. Определение сил, действующих на подрессоренную часть транспортного средства, производится по известным зависимостям, заложенным в памяти известного микропроцессора.
При движении транспортного средства по неровной дороге в случаях, когда измеряемые датчиками 1-5 параметры не превышают допустимых значений, находящихся в памяти блоков 9, 10, аналого-дискретные преобразователи блока 7 по каналам измерения сил, действующих от подвесок колес на подрессоренную часть транспортного средства, формируют суммарный сигнал, зависящий от микропрофиля дороги и величин α,ϕ , ΔG, V,  . С помощью датчиков 1-4, блока 7 и блоков 9 и 10 в блоке 11 производится вычисление составляющих сил по известным зависимостям в функции измеряемых величин α,ϕ ,ΔG, V,
. С помощью датчиков 1-4, блока 7 и блоков 9 и 10 в блоке 11 производится вычисление составляющих сил по известным зависимостям в функции измеряемых величин α,ϕ ,ΔG, V,  . Сигнал, пропорциональный сумме этих составляющих, поступает в блоки сравнения блока 11 формирования сигналов равномерного распределения нагрузок между активными подвесками колес и вычитается из сигналов, поступающих от датчиков 5 сил, действующих от подвесок колес на подрессоренную часть. Поэтому на выходе блока 11 формируются сигналы, пропорциональные динамической нагрузке, зависящей только от микропрофиля дороги.
. Сигнал, пропорциональный сумме этих составляющих, поступает в блоки сравнения блока 11 формирования сигналов равномерного распределения нагрузок между активными подвесками колес и вычитается из сигналов, поступающих от датчиков 5 сил, действующих от подвесок колес на подрессоренную часть. Поэтому на выходе блока 11 формируются сигналы, пропорциональные динамической нагрузке, зависящей только от микропрофиля дороги.
При движении транспортного средства по неровной дороге, когда измеряемые датчиками 1-4 величины превосходят допустимые значения, заложенные в памяти блоков 9 и 10 определения продольной и поперечной устойчивости, в блоках 9 и 10 вырабатываются сигналы управления, предназначенные для формирования в блоке 11 сигналов управления исполнительными механизмами силового привода активных подвесок колес таким образом, чтобы было обеспечено уменьшение величины, превысившей допустимую.
Изобретение позволяет обеспечивать расширение функциональных возможностей путем одновременного повышения плавности хода и устойчивости движения транспортного средства, а также равномерного распределения нагрузок, действующих на подрессоренную часть транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКТИВНАЯ ПОДВЕСКА ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2019439C1 |
| Система управления активными подвесками транспортного средства | 1988 |
|
SU1572838A1 |
| Система управления активными подвесками многоосного транспортного средства | 1983 |
|
SU1150103A1 |
| Система управления активной подвеской транспортного средства | 1990 |
|
SU1789358A1 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ПОЛУРАМ СОЧЛЕНЕННОГО ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2013274C1 |
| Система управления активными подвесками многоопорного транспортного средства | 1988 |
|
SU1527022A1 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ПОЛУРАМ СОЧЛЕНЕННОГО ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2025374C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДВУХ ДВИГАТЕЛЕЙ АВТОМОБИЛЯ | 1990 |
|
RU2018014C1 |
| СПОСОБ И СИСТЕМА ПОДРЕССОРИВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2548823C2 |
| Способ и система управления демпфирующими свойствами системы подрессоривания танка | 2024 |
|
RU2826323C1 |
Изобретение относится к активным подвескам транспортных средств, в частности к устройствам для управления активными подвесками. Сущность: устройство содержит датчики 1 - 5 углов продольного и поперечного кренов, изменения статистического веса подрессоренной части, скорости движения транспортного средства и сил, действующих от подвесок колес на подрессоренную часть, блоки 9, 10 определения продольной и поперечной устойчивости и блок 11 формирования сигналов равномерного распределения нагрузок между активными подвесками колес. По показаниям датчиков сил, действующих от подвесок на подрессоренную часть, датчиков скорости движения и продольного ускорения транспортного средства, формируются сигналы управления активными подвесками колес, которые корректируются в соответствии с сигналами датчиков углов продольного и поперечного крена и изменения статистического веса. Управление исполнительными механизмами осуществляется блоком формирования сигналов равномерного распределения между активными подвесками колес. 1 ил.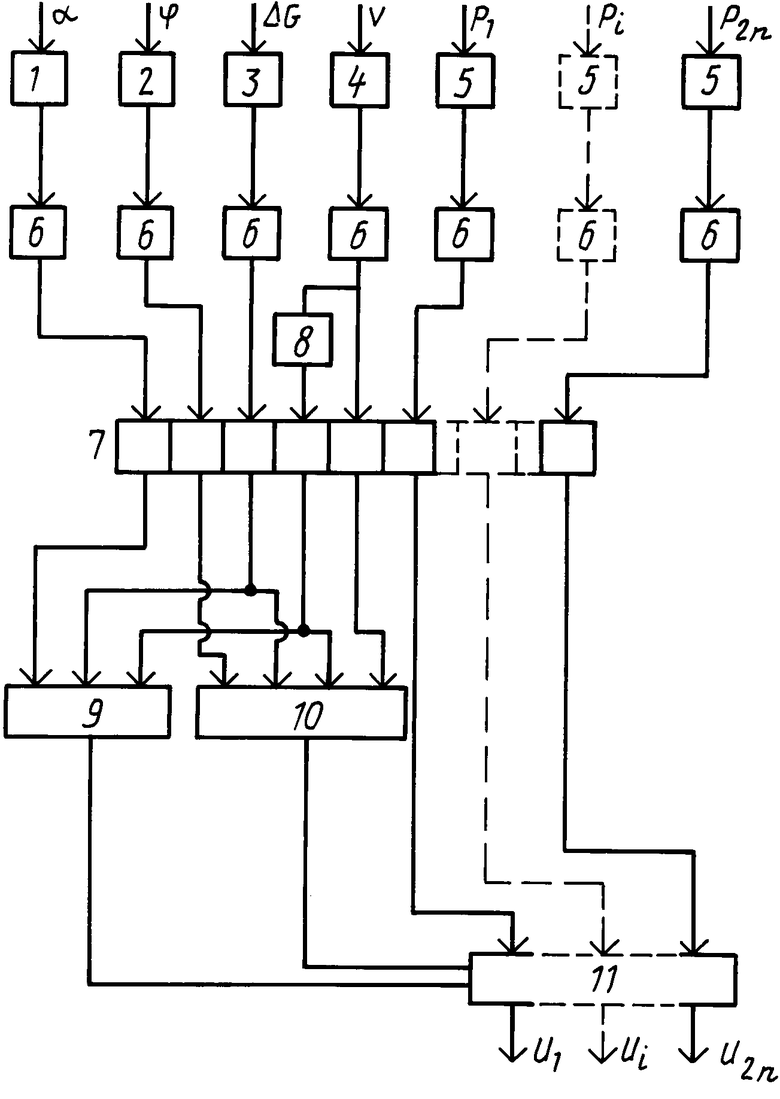
СИСТЕМА УПРАВЛЕНИЯ АКТИВНОЙ ПОДВЕСКОЙ ТРАНСПОРТНОГО СРЕДСТВА, содержащая датчики углов продольного и поперечного кренов, датчик изменения статического веса подрессоренной части транспортного средства, датчик скорости движения транспортного средства, датчик сил, действующих от подвесок колес на подрессоренную часть, выходы указанных датчиков соединены через низкочастотные фильтры с входами блока аналого-дискретных преобразователей с образованием с фильтрами и датчиками каналов измерения перечисленных величин, дифференцирующее звено, установленное параллельно каналу измерения скорости движения транспортного средства, вход которого соединен с выходом низкочастотного фильтра канала измерения скорости движения транспортного средства, а выход - с блоком аналого-дискретных преобразователей, выходы которого по каналам измерения статического веса подрессоренной части и продольного ускорения соединены с входами блока определения продольной устойчивости транспортного средства, выходы блока аналого-дискретных преобразователей по каналам измерения угла поперечного крена, изменения статического веса подрессоренной части, скорости движения транспортного средства и его продольного ускорения соединены с входами блока определения поперечной устойчивости, отличающаяся тем, что выходы блока аналого-дискретных преобразователей по каналам измерения сил, действующих от подвесок колес на подрессоренную часть транспортного средства, и выходы блоков определения продольной и поперечной устойчивости транспортного средства соединены с входами блока формирования сигналов равномерного распределения нагрузок между активными подвесками колес, выходы которого соединены с исполнительными механизмами силового привода активных подвесок колес.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система управления активными подвесками многоопорного транспортного средства | 1988 |
|
SU1527022A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
