СО
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления активными подвесками многоопорного транспортного средства | 1988 |
|
SU1527022A1 |
| СИСТЕМА УПРАВЛЕНИЯ АКТИВНОЙ ПОДВЕСКОЙ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2019438C1 |
| АНТИШОКОВАЯ ПОДВЕСКА | 2018 |
|
RU2676843C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2568163C1 |
| Система управления активными подвесками многоосного транспортного средства | 1983 |
|
SU1150103A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2568048C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2568047C1 |
| Система управления активными подвесками транспортного средства | 1988 |
|
SU1572838A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2575368C1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ПОПЕРЕЧНОЙ УСТОЙЧИВОСТИ ТРАНСПОРТНЫХ СРЕДСТВ | 2010 |
|
RU2424129C1 |
Использование - изобретение относится к активным подвескам транспортных средств, в частности к системам управления активной подвеской. Сущность: система управления активной подвеской транспортного средства включает в себя 8 датчиков: скорости движения 6, относительных перемещений подрессоренной и неподрессоренной масс правой и левой передней подвески, изменения статического веса, ускорения неподрессоренной массы передней подвески, углов продольного и поперечного кренов подрессоренной массы. Датчики через низкочастотные фильтры и блок аналого-цифровых преобразовате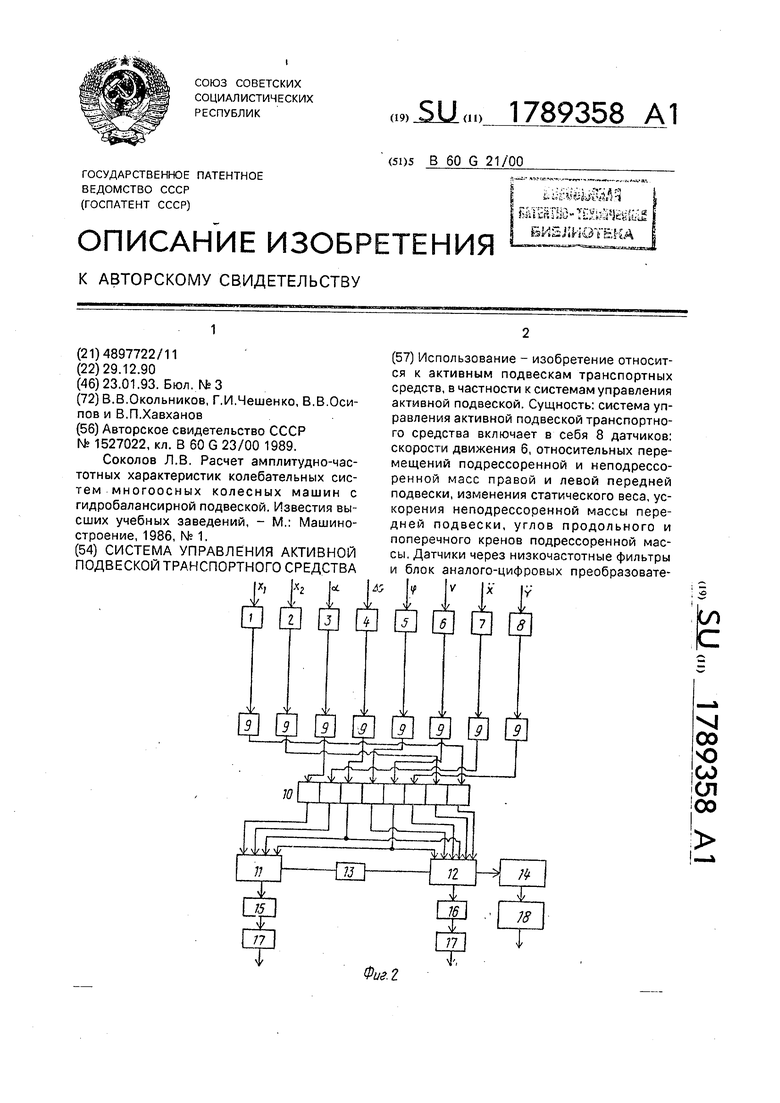
Х| 00
Ю СО
ел
00
лей соединены с блоками сравнения измеряемых величин с допустимыми их значениями. С блоков сравнения сигнал подается через цифроаналоговые преобразователи 14-16 на блоки управления исполнительными механизмами активной подвески 17. Новым в
Изобретение относится к активным подвескам транспортных средств, в частности, к системам управления активной подвеской.
Наиболее близкой предлагаемой по технической сущности является система управления активными подвесками многоопорного транспортного средства (1), содержащая датчики: скорости движения, относительных перемещений подрессо- ренной и неподрессоренной масс правой и левой передней подвески, изменения статического веса транспортного средства, ускорения непосредственной массы передней подвески, углов продольного и поперечного крена; аналого-цифровые преобразователи; блоки определения продольной и поперечной устойчивости; блоки управления; таймер.
Недостатками известной системы явля- ются низкое ее быстродействие и недостаточная плавность хода при движении по неровностям на прямолинейных участках дорог.
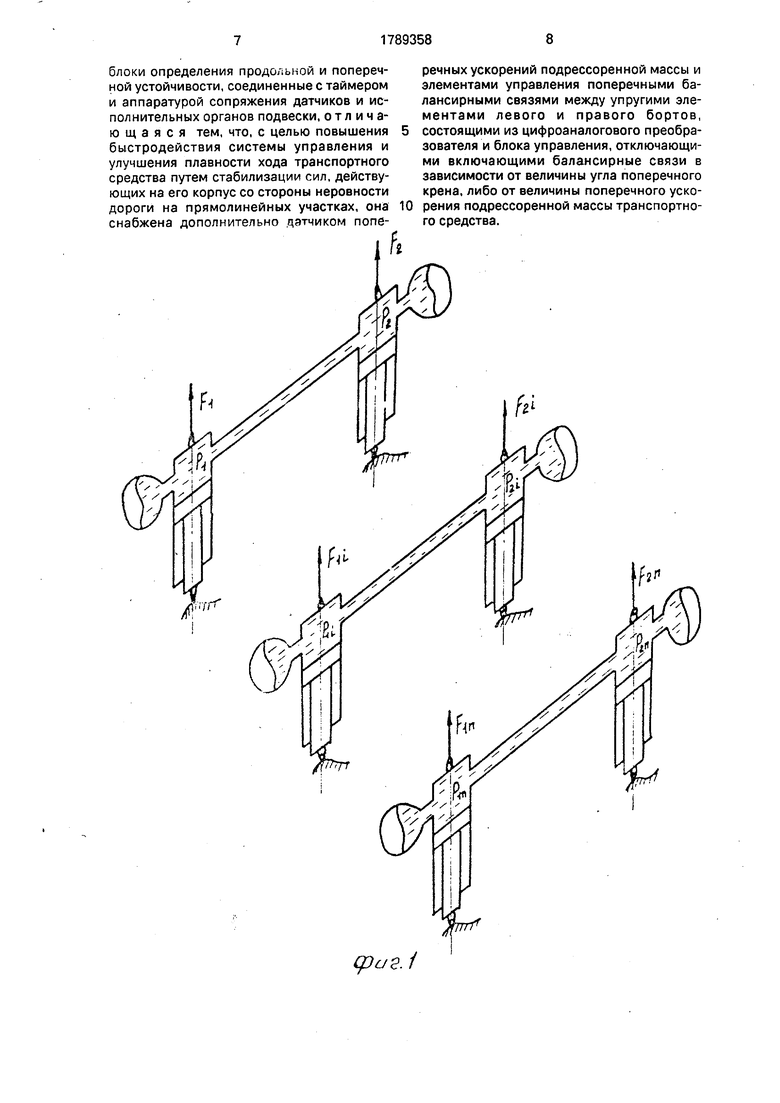
Целью изобретения является повыше- ние быстродействия системы управления и улучшения плавности хода транспортного средства путем стабилизации сил, действующих на его корпус со стороны неровности дороги на прямолинейных ее участках, Цель достигается тем, что упругие элементы подвески транспортного средства левого и правого колес каждой оси соединены балансирными связями, которые включены или отключены в зависимости от величины текущих значений угла крена и поперечного ускорения подрессоренной массы. В подвеске с гидропневматическими упругими элементами при движении транспортного средства по неровной дороге такое соеди- нение позволяет выравнивать давления текущей и упругой среды PI и Р2 в рабочих полостях упругих элементов, а следовательно, и сил, действующих на подрессоренную часть транспортного средства, что видно из выражения (1):
81;
S2,(1)
системе управления является установка дополнительного датчика поперечных ускорений подрессоренной массы, а также блоков управления поперечными балансирными связями, соединяющими упругие элементы правого и левого колес одной оси. 3 ил.
где Si и $2 площадь рабочих цилиндров упругих элементов.
При равенстве площадей Si и S2 будут равны и силы FI и F2, а следовательно, и суммы сил, действующих на подрессоренную часть транспортного средства со стороны упругих элементов правого и левого бортов
пп
2 FH 2 F2i,
(2)
где п - число осей транспортного средства.
Равенство сил, действующих со стороны левого и правого бортов, приводит к тому, что сумма моментов, вызывающих поперечные и угловые колебания, равна нулю.
Таким, образом, снижение возмущений поперечно-угловых колебаний с помощью применения поперечных балансирных связей способствует улучшению плавности хода транспортного средства. Одновременно, использование балансирных связей способствует увеличению быстродействия системы управления активной подвеской на прямолинейных участках дорог, поскольку наличие балансирных связей обеспечивает более быстрое выравнивание нагрузок на подрессоренную часть транспортного средства со стороны левого и правого его бортов, чем это делает известная система управления,
Главным недостатком в использовании балансирных связей, как отмечено в работе (2), является снижение показателей поперечной устойчивости в таких режимах движения, когда силовое воздействие на упругие элементы подвески направлено со стороны подрессоренной части транспортного средства. Эти силы могут возникать при криволинейном движении (силы инерции), либо на косогоре (составляющая веса подрессоренной части).
Для устранения данного недостатка в систему управления .активной подвеской введены дополнительные элементы, управляющие устройством для отключения ба- лансирных связей в указанных выше условиях движения.
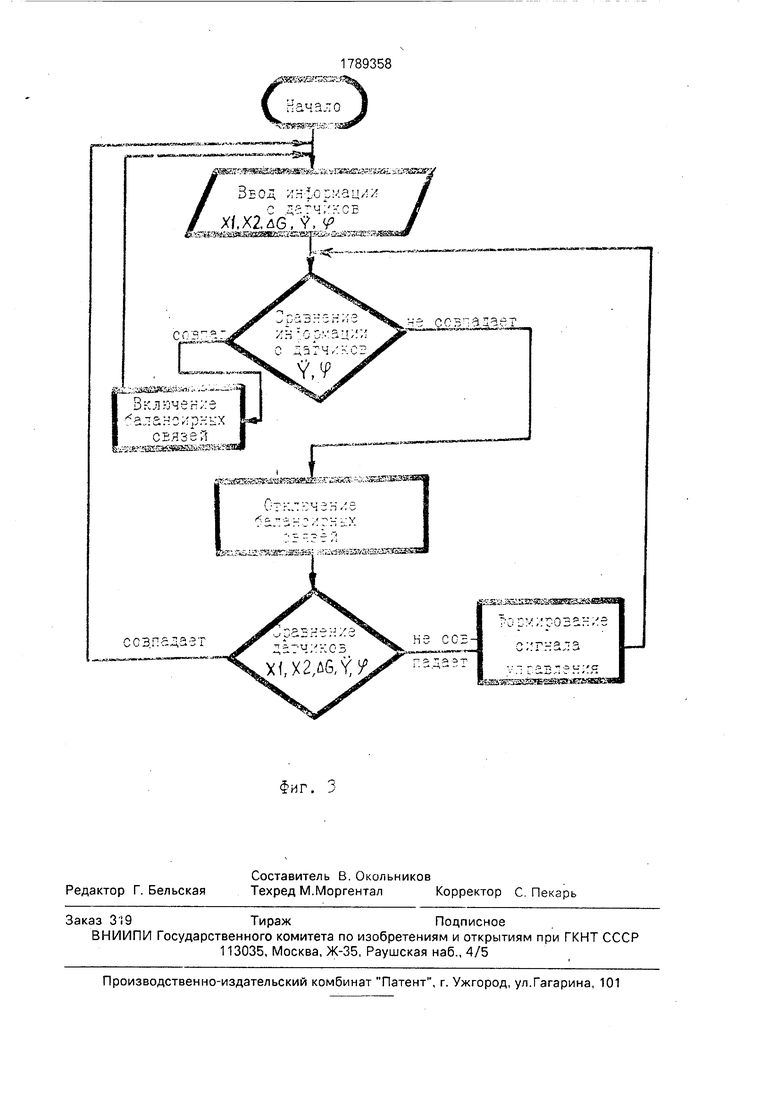
На фиг.1 представлена схема соединения упругих элементов подвески левого и правого бортов транспортного средства поперечными балансирными связями; на фиг.2 - предлагаемая система управления активной подвеской транспортного средства; на фиг.З - блок-схема алгоритма работы системы управления активной подвеской транспортного средства.
Система управления активной подвеской включает в себя: датчики 1 и 2 относительных перемещений подрессоренной и неподрессоренной масс правой и левой передней подвески; датчики 3 угла продольного крена подрессоренной массы; датчик 4 изменения статического веса транспортного средства; датчик 5 угла поперечного крена подрессоренной массы; датчик 6 скорости движения; датчик 7 ускорения неподрессоренной массы передней подвески; датчик 8 поперечного ускорения подрессоренной массы; низкочастотные фильтры 9; блок аналого-цифровых преобразователей 10; блоки 11, 12 определения продольной и поперечной устойчивости; таймер 13; циф- роаналоговые преобразователи 14, 15, 16; блоки управления исполнительными устройствами активной подвески 17 и блок управления балансирными связями 18.
При движении транспортного средства по неровной дороге сигналы с датчиков 1-8 поступают через низкочастотные фильтры 9 на блок аналого-цифровых преобразователей 10 (АЦП), где эти сигналы преобразуются в цифровой код. Выходы АЦП 10 соединены соответственно с блоками определения продольной 11 и поперечной 12 устойчивости, причем, с блоком определения продольной устойчивости 11 соединены выходы АЦП 10 по каналам измерения угла продольного крена а, изменения веса подрессоренной части AG, скорости движения транспортного средства V и ускорения неподрессоренной массы передней подвески
X. С блоком определения поперечной усФормула изобретения Система управления активной подвеской транспортного средства, содержащая датчики скорости движения, относительных перемещений подрессоренной и неподрестойчивости 12 соединены выходы АЦП 10 по каналам изменения веса подрессоренной части AG, угла поперечного крена р, скорости движения транспортного средства V, разности относительных перемещений подрессоренной и неподрессоренной масс правой Xt и левой Х2 подвески, поперечного
ускорения подрессоренной массы Y. Блоки
11 и 12 соединены с выходами таймера 13, который предназначен для формирования временных интервалов, определяющих моменты выдачи управляющих воздействий в зависимости от скорости движения транспортного средства и характера возмущений. Блоки 11 и 12 предназначены для сравнения величин, поступающих с датчиков 1-8 сигналов с заложенными в память максимально допустимыми их значениями,
с целью формирования сигналов, компенсирующих дорожные возмущения, Выходы блоков 11 и 12 соединены с цифроаналого- выми преобразователями (ЦАП) цепей управления балансирными связями 14,
продольной и поперечной устойчивости 15, 16. Выходы с ЦАП 14, 15 и 16 соединены с входами блока управления 17, 18, которые предназначены для формирования необходимой амплитуды и длительности сигналов
управления, подаваемых на исполнительные устройства активной подвески 17 и с блоком управления балансирными связями 18. Когда величины сигналов с датчиков 5 и 8 не превышают максимально допустимых
значений сигнал с блока 12 поперечной устойчивости не формируется, при этом выравнивание возмущений поперечной плоскости со стороны неровностей дороги происходит за счет поперечных балансириых связей, которые в этих условиях включены. При превышении величин сигналов с датчиков 5 или 8 допустимых значений, с блока 12 поперечной устойчивости подается сигнал на управление отключение балансирных связей и на блок управления 17.
Готовность системы управления активной подвеской транспортного средства выражается в наличии технического предложения.
соренной масс правой и левой передней подвески, изменения статического веса транспортного средства, ускорения неподрессоренной массы передней подвески, углов продольного и поперечного крена,
блоки определения продольной и поперечной устойчивости, соединенные с таймером и аппаратурой сопряжения датчиков и исполнительных органов подвески, отличающаяся тем, что, с целью повышения быстродействия системы управления и улучшения плавности хода транспортного средства путем стабилизации сил, действующих на его корпус со стороны неровности дороги на прямолинейных участках, она снабжена дополнительно датчиком попе
речных ускорений подрессоренной массы и элементами управления поперечными ба- лансирными связями между упругими элементами левого и правого бортов, состоящими из цифроаналогового преобразователя и блока управления, отключающими включающими балансирные связи в зависимости от величины угла поперечного крена, либо от величины поперечного ускорения подрессоренной массы транспортного средства.
5ЈйПЕ гт 4иЈзи ;йг жж;-,.гжагЕзгззз
Отк-;ч2н,з
. С. г- ..- - - 1 - „- - у
Kl S5EC3aEifSj;«iM SSS /aSCS53GS 3ri
| Система управления активными подвесками многоопорного транспортного средства | 1988 |
|
SU1527022A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Соколов Л.В | |||
| Расчет амплитудно-частотных характеристик колебательных систем многоосных колесных машин с гидробалансирной подвеской | |||
| Известия высших учебных заведений, - М.: Машиностроение, 1986, № 1. | |||
