Изобретение относится к активным подвескам транспортных средств, в частности к устройствам для управления активными подвесками.
Целью изобретения является расширение функциональных возможностей путем повышения плавности хода и устойчивости движения транспортного средства.
На фиг. 1 представлена блок-схема системы управления активными подве- сками многоопорного транспортного средства; на фиг. 2 - структурная схема блока определения устойчивости на фиг. 3 - блок-схема алгоритма функционирования системы управления.
Система управления активными подвесками многоопорного транспортного средству содержит датчики J и 2 относительных перемещений XJ и Х2 подрессоренной и неподрессоренной масс правой и левой передних подвесок соответственно индуктивного типа, датчик 3 угла продольного крена транспортного средства маятникового типа, датчик 4 изменения ДС статического веса подрессоренного корпуса транспортного средства тензометри- ческого типа, датчик 5 угла Cf поперечного крена транспортного средства маятникового типа, датчик 6 скорости V движения транспортного средства та хометрического типа, измеряющий скорость по числу оборотов вращающихся деталей силовой передачи, датчик 7 ускорений X неподрессоренной массы / передней подвески транспортного средства.
Выходы датчиков 1 и 2 соединены с входами сумматора 8 сигналов, выход
которого и выходы датчиков 3-7 через
низкочастотные фильтры 9 соединены с входами блока 10 аналого-цифровых преобразователей (АЦП).
Каждый из аналого-цифровых преобразователей в блоке 10 совместно с низкочастотными фильтрами 9, датчиками 1-7 и сумматором 8 сигналов образуют каналы измерения разности относительных перемещений ft X подр ссорен5
0 5
Q п j
5
0
5
ной и неподрессоренной масс правой и левой передней подвески, угла od продольного крена транспортного средства, изменения G статистического веса подрессоренного корпуса транспортного средства, угла Ср поперечного крена транспортного средства, скорости V движения транспортного средства, ускорения неподрессоренной массы передней подвески транспортного средства.
В блоке 10 непрерывные сигналы с датчиков 3-7 с выхода сумматора сигналов преобразуются в цифровой код.
Выходы АЦП соединены соответственно с блоками 11 и 12 определения продольной и поперечной устойчивости, с блоком 11 определения продольной устойчивости соединены выходы АЦП по каналам измерения угла ot продольного крена, изменения ДС веса подрессоренного корпуса, скорости V движения транспортного средства и ускорения X неподрессоренной массы передней подвески транспортного средства. С блоком 1 2 определения поперечяой устойчивости соединены выходы АЦП по каналам изменения веса ДС подрессоренного корпуса, угла (f поперечного крена, скорости V движения транспортного средства, разности относительных перемещений АХ лрдрессоренной и ие- подрессоренно масс и левой, передней, подвески.
Блоки JJ и J2 предназначены для вычисления составлякяцих усилий, действующих на подрессоренный корпус в функции изменения измеряемых параметров по известным зависимостям, заложенным в память, и для последующего суммирования величин указанных составляющих усилий. Эти блоки необходимы также дли формирования сигналов , компенсирующих дорожные возмущения.
Структурные схемы блоков 11 и 12 совершенно аналогичны и отличаются лишь .вводами. В блок 11 определения продольной устойчивости вводят измеренные значения od, Л G, V, X, а
в блок определения поперечной устойчивости - измеренные значения 4G, 1, V, ЛХ.
Блоки И и 12 определения устойчивости соединены с выходами таймера 13, который предназначен для формирования временных интервалов, которые определяют моменты выдачи управляемых воздействий в зависимости от скорости движения транспортного средства и характера возмущений.
Выходы блоков определения продольной 11 и поперечной 12 устойчивости соединены с цифроаналоговыми преобра- зователя (ЦАП) продольной устойчивости IA и поперечной устойчивости 15 соответственно.
Выходы ЦАП I4 и I5 соединены с входами блока 16 управления, который предназначен для формирования необходимой амплитуды и длительности сигяа- лрв управления, подаваемых на дополнительные механизмы подвески.
Блок определения устойчивости транспортного средства (фиг.2) представляет собой микропроцессор с запоминающим устройством 17 (ЗУ).
Микропроцессор включает в себя буферные схемы ввода 18 и вывода 19, арифметико-логическое устройство 20 (АЛУ), устройство 21 управления (УУ) блок 22 связи (ЕС) и блок 23 управляющих регистров. ЗУ 17 включает в себя оперативное запоминающее устройство (ОЗУ) и постоянное запоминающее устройство (ПЗУ),
В ЗУ находятся программа вычисления составляющих сил, действующих на подрессоренный корпус со стороны деталей подвески в зависимости от измеряемых параметров, заданные значения измеряемых параметров и программа определения управляющих воздействий, которые необходимо подать на исполнительные органы подвески с тем, чтобы предотвратить колебания, вызванные дорожными возмущениями.
АЛУ производит логические и арифметические операции над измеренными величинами.
УУ вырабатывает необходимые управляющие сигналы для ввода исходных данных через буферную схему ввода, выборки очередной команды и данных из памяти, дешифрации кода команды, выборки подпрограмм из памяти, передачи результатов счета из АЛУ в память и через блок связи в буферную схему
0
0
5
г
вьшода к внешним устройствам, в рассматриваемом случае к входу 1 АП.
Блок управляющих регистров предназначен для временного хранения управляющей информации и содержит регистры и счетчики, участвующие в управлении вычислительным процессом.
Блок связи организует обмен информацией процессора с оперативной памятью (ОЗУ), а а также с внешним по отношению к микропроцессору оборудованием.
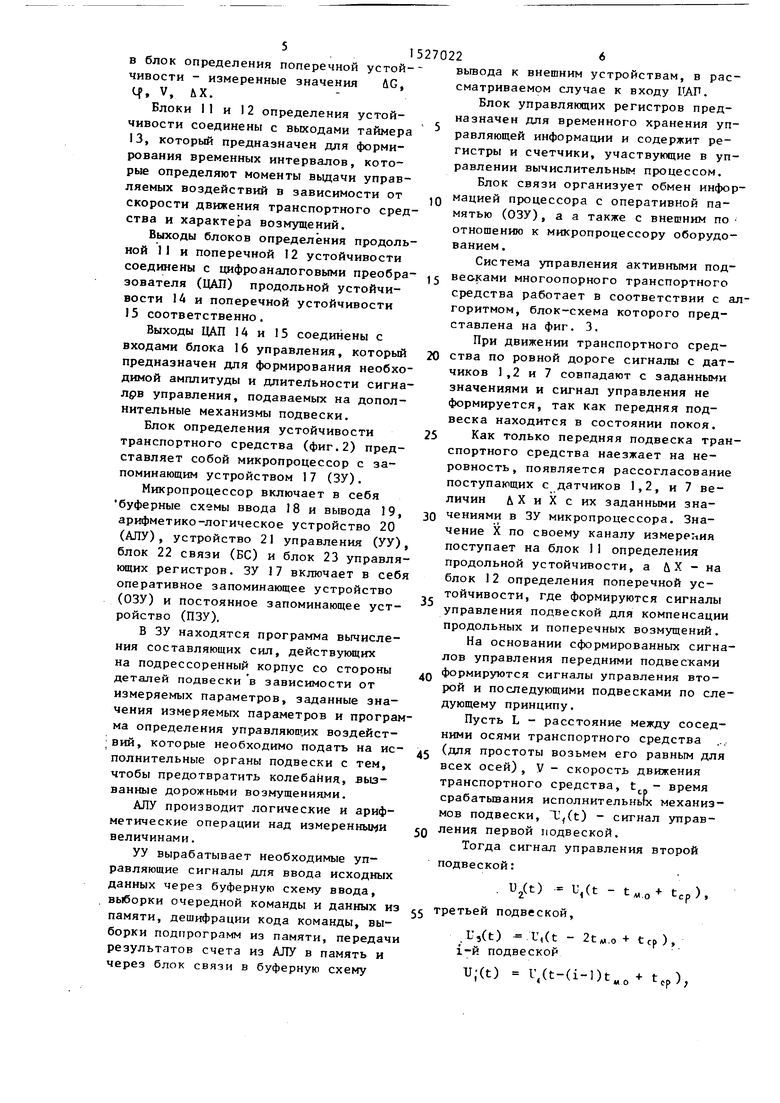
Система управления активными под- ве&ками многоопорного транспортного средства работает в соответствии с алгоритмом, блок-схема которого представлена на фиг. 3.
При движении транспортного средства по ровной дороге сигналы с датчиков 1,2 и 7 совпадают с заданными значениями и сигнал управления не формируется, так как передняя подвеска находится в состоянии покоя.
Как только передняя подвеска транспортного средства наезжает на неровность, появляется рассогласование поступающих с датчиков 1,2, и 7 величин & X и X с их заданными значениями в ЗУ микропроцессора. Значение X по своему каналу измерения поступает на блок 11 определения продольной устойчивости, а UX - на блок 12 определения поперечной устойчивости, где формируются сигналы управления подвеской для компенсации продольных и поперечных возмущений.
На основании сформированных сигналов управления передними подвесками формируются сигналы управления второй и последующими подвесками по следующему принципу.
Пусть L - расстояние между соседними осями транспортного средства (для простоты возьмем его равным для всех осей) , V - скорость движения транспортного средства, t. - время срабатьшания исполнительньгх механизмов подвески, T,(t) - сигнал управления первой подвеской.
Тогда сигнал управления второй
подвеской:
. (t) U,(t - t.o tcp), 5 третьей подвеской,
U,(t) - T,(t - 2Сд,.о + tcp ),
0
5
0
5
0
i-й подвеской U;(t) (i-l)t«,
+ t
cp
);
де 1 n MO.
порядковьп1 номер оси транспортного средства, i 1,ni количество осей транспортного средства;
время, за которое транспортное средство проходит межосевое расстояние, t.
L
м,о Y
Для привязки к текущему времени используется таймер 13.
Во избежание накопления ошибок в системе управления используется обратная связь по сигналам датчиков 3на основании снимаемых с них сигналов dL , G и Cf корректируется сигнал управления подвесками с тем, чтобы cit , uG и Ц) приняли заданные значения, записанные в ЗУ микропро- п.ессора.
(формула изобретения
Система управления активными под- весками многоопорного транспортного средства, содержаш,ая датчик угла про дольного крена, датчик угла поперечного крена, датчик изменения статического веса подрессоренного корпуса транспортного средства, датчик скорости движения транспортного средства, причем выходы указанных датчиков через низкочастотные фильтры соединены с входами блока аналого- цифровых преобразователей, которые совместно с упомянутыми фильтрами и датчиками образуют каналы измерения перечисленных величин, при этом выходы блока аналого-цифровых преобразователей по каналам измерения уг
0
5
о
5
0
5
рости движения транспортног-о средства соединены с блоком определения поперечной устойчивости транспортного средства, соединенным с р.ифро- аналоговым преобразователем попереч- ной устойчивости, отличающая с я,тем,что, с целью расширения функциональных возможностей путем повышения плавности хода и устойчивости движения, она снабжена дополнительно датчиками относительных перемещений подрессоренной и непод- ресоренной масс правой и левой передней подвески, датчиком ускорений неподрессоренной массы передней подвески, сумматором сигналов, суммирующим усилителем и таймером, причем выходы датчиков относительных перемещений соединены с входами сумматора сигналов, а его выход и выход датчика ускорений неподрессоренной массы передней подвески через низкочастотные фильтры соединены с блоком аналого-цифровых преобразователей, которые совместно с указанными фильтрами, датчиками и сумматором сигналов образуют каналы измерения разности относительных перемещений подрессоренной и неподрессоренной масс правой и левой передней подвески и ускорений неподрессоренной массы передней подвески, при этом выходы блока аналого-цифровых преобразователей по канллу измерения разности относительных перемещений подрессоренной и неподрессоренной масс правой и левой передней подвески сое-, динены с блоком определения попереч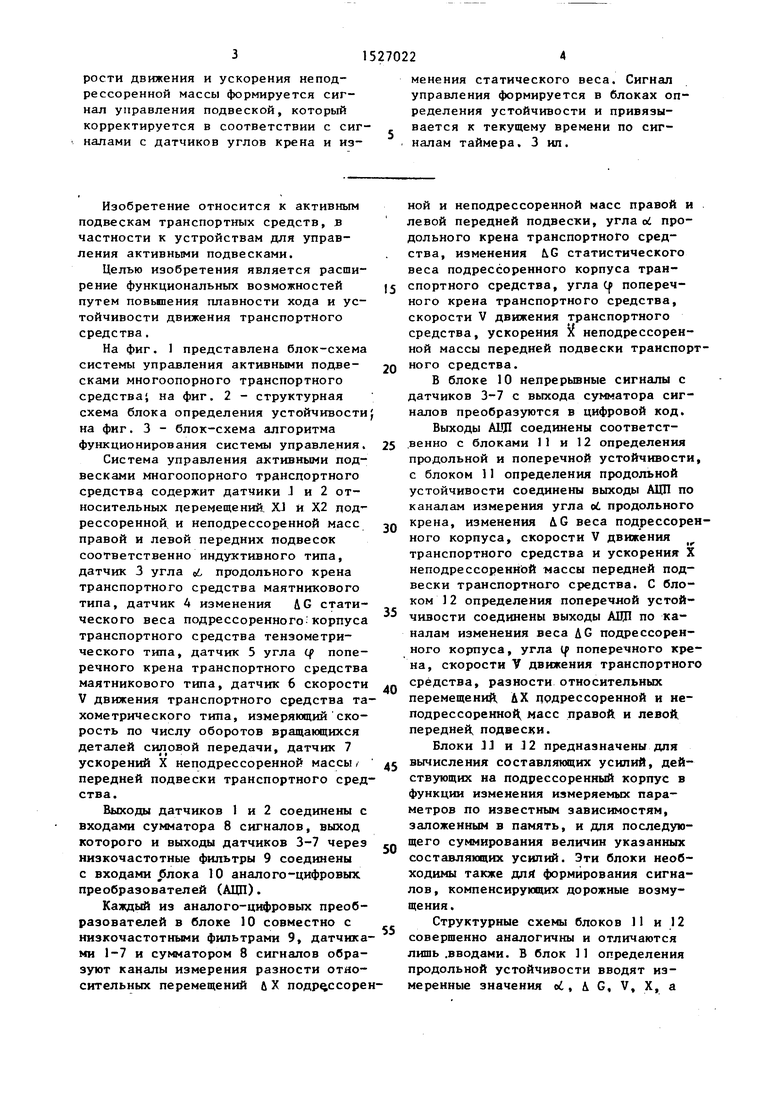
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления активной подвеской транспортного средства | 1990 |
|
SU1789358A1 |
| СИСТЕМА УПРАВЛЕНИЯ АКТИВНОЙ ПОДВЕСКОЙ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2019438C1 |
| Система управления активными подвесками многоосного транспортного средства | 1983 |
|
SU1150103A1 |
| Система управления активными подвесками транспортного средства | 1988 |
|
SU1572838A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2568163C1 |
| АНТИШОКОВАЯ ПОДВЕСКА | 2018 |
|
RU2676843C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2568048C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2568047C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2575368C1 |
| Способ и система управления демпфирующими свойствами системы подрессоривания танка | 2024 |
|
RU2826323C1 |
Изобретение относится к активным подвескам транспортных средств, в частности к устройствам для управления активными подвесками. Цель изобретения - расширение функциональных возможностей путем повышения плавности хода и устойчивости движения. Устройство содержит датчики 1 - 7 скорости движения транспортного средства, относительных перемещений подрессоренной и неподрессоренной масс правой и левой передней подвески, изменения статического веса транспортного средства, ускорения неподрессоренной массы передней подвески, углов продольного и поперечного крена транспортного средства, а также блоки 11 и 12 определения продольной и поперечной устойчивости и аппаратуру сопряжения датчиков и исполнительных органов подвески с этими блоками. По показаниям датчиков относительных перемещений, скорости движения и ускорения неподрессоренной массы формируется сигнал управления подвеской, который корректируется в соответствии с сигналами с датчиков углов крена и изменения статического веса. Сигнал управления формируется в блоках определения устойчивости и привязывается к текущему времени по сигналам таймера. 3 ил.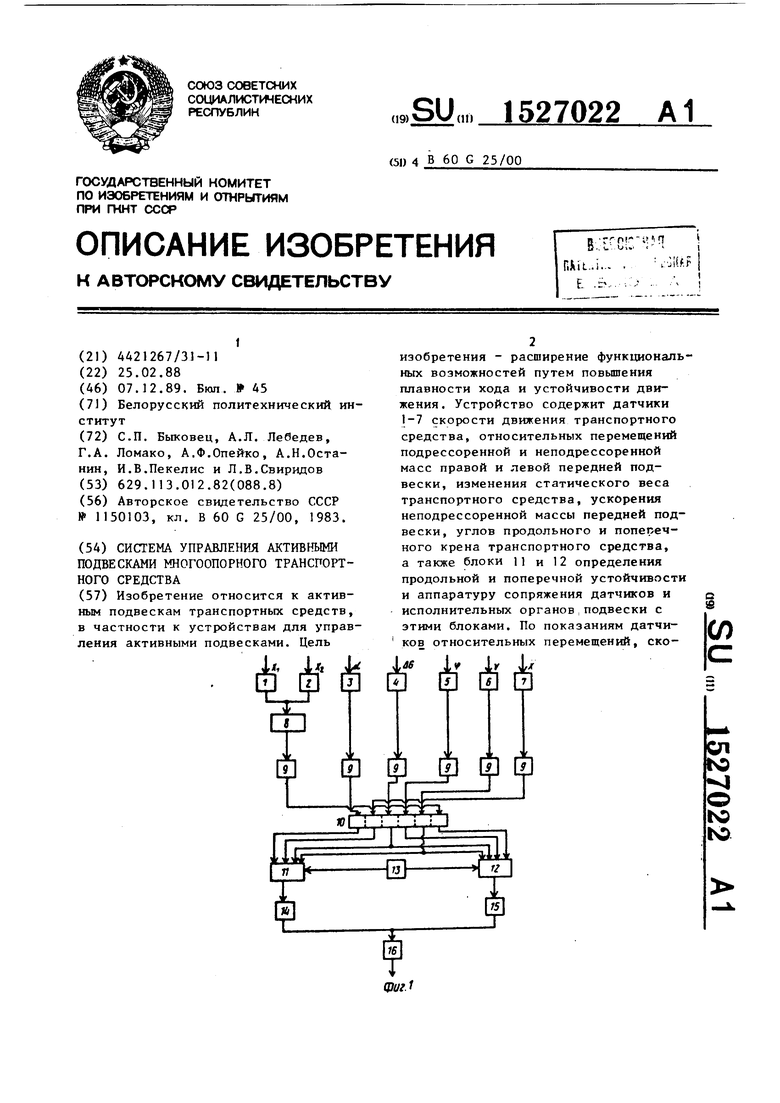
ла продольного крена, изменения стати- д ной устойчивости, а выходы блока аначеского веса подрессоренного корпуса и скорости движения транспортного средства соединены с блоком определения продольной устойчивости транспортного средства, соединенным с цифроаналоговым преобразователем прЬ- дольной устойчивости, а выходы блока аналого-цифровых преобразователей по каналам измерения изменения статического веса подрессоренного корпуса, угла поперечного крена и ско
лого-цифровых преобразователей по каналу измерения ускорения неподрессоренной массы передней подвески соединены с блоком определения продольной устойчивости,при этом выходы таймера сое- цинены с входами блоков определения продольной и поперечной устойчивости, а выходы цифроаналоговых преобразователей продольной и поперечной устойчивости соединены с суммирующим усилителем.
Г начо/ю Л
1
/иод инф щмации сдагтчи- / ,яг,х/
Форнцровтл/е сигнала ления передней nodeect oii
.ния второй и пос щини поавеска и
/
i
etod шлрорнаиии с Лгт- чоков ai,M,f
Cotno tm - „ лсонацииа
..fciodmHt/ffu значениями
±
ой и пос
моррекция cuiHOM Sff me/ieMUf
Me cottioeof/it
| Система управления активными подвесками многоосного транспортного средства | 1983 |
|
SU1150103A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
