В промышленности, транснорте и энергетических системах широко применяются замкнутые электрические системы автоматического регулирования. Известно, что подобные системы, передаточная функция которых имеет порядок уравнения выше двух,, при определенных условиях становятся неустойчивыми, вследствие чего возникает противоречие между требованием к степени точности слежения объекта регулирования за программой и способностью системы ее отрабатывать. Это противоречие тем труднее разрешить, чем сложнее система регулирования, чем больше она имеет число звеньев и чем выше требования к точности слежения выходной функции системы за ее входом.
Как правило, в системе, не оснащенной специальными стабилизирующими средствами, колебания возникают еш.е до того, как достигнут коэффициент усиления, требующийся для обеспечения заданной статической и динамической точности.
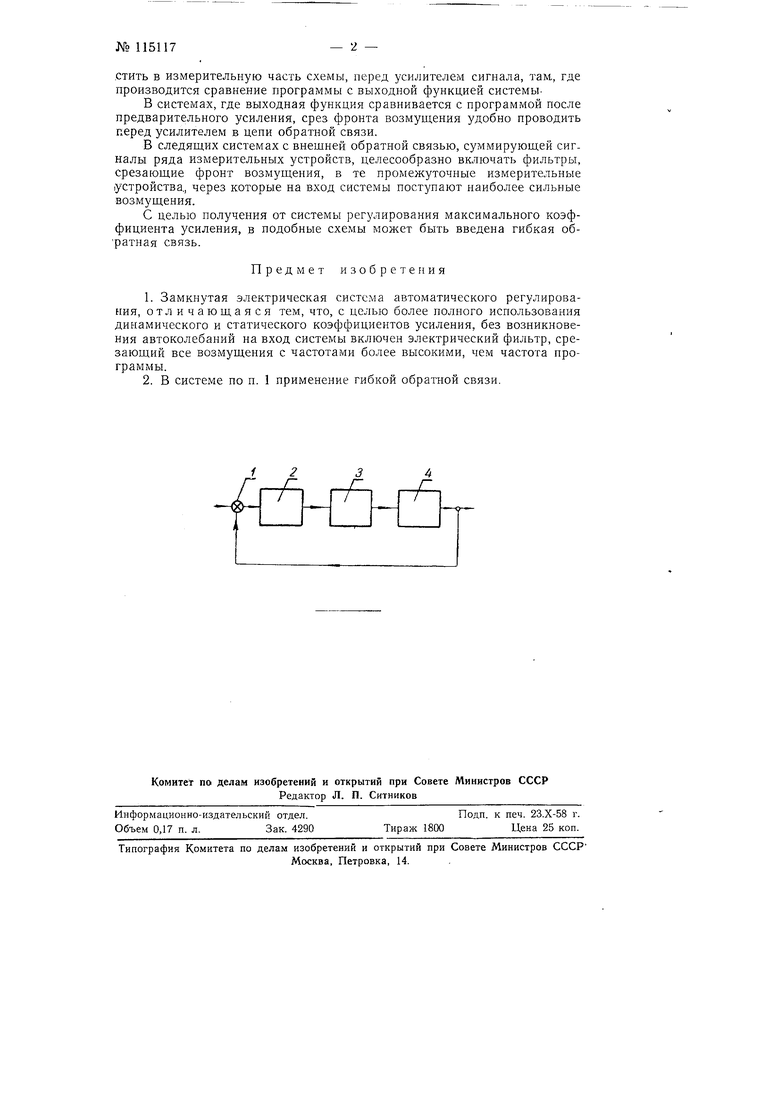
Для устранения этого недостатка и более полного использования динамического и статического коэффициентов усиления без возникновений автоколебаний предлагается,, согласно изобретению, включать на вход системы электрический фильтр, срезающий все возмущения с частотами более высокими, чем частота программыНа чертеже изображена блок-схема предлагаемой системы.
На вход / системы автоматического регулирования в измерительной ее части включается электрический фильтр 2, срезающий фронт всех возмущений с частотой, больщей частоты программы. Прокорректированный фильтром 2 сигнал затем подается на усилитель 3 и регулируемый объект 4.
В качестве фильтра 2 может быть использовано периодическое звено, например индуктивность, емкость и т- п. Фильтр необходимо поме.стить в измерительную часть схемы, перед усилителем сигнала, там, где производится сравнение программы с выходной функцией системыВ системах, где выходная функция сравнивается с программой после предварительного усиления, срез фронта возмущения удобно проводить перед усилителем в цепи обратной связи.
В следяпдих системах с внешней обратной связью, суммирующей сигналы ряда измерительных устройств, целесообразно включать фильтры, срезающие фронт возмущения, в те промежуточные измерительные устройства., через которые на вход системы поступают наиболее сильные возмущения.
С целью получения от системы регулирования максимального коэффициента усиления, в подобные схемы может быть введена гибкая обратная связь.
Предмет изобретения
1.Замкнутая электрическая система автоматического регулирования, от л ичающаяся тем, что, с целью более полного использования динамического и статического коэффициентов усиления, без возникновения автоколебаний на вход системы включен электрический фильтр, срезающий все возмущения с частотами более высокими, чем частота программы.
2.В системе по п. 1 применение гибкой обратной связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Замкнутая электрическая система автоматического регулирования | 1957 |
|
SU125295A1 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2218549C2 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АВТОКОЛЕБАТЕЛЬНЫХ РУЛЕВЫХ ПРИВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2145052C1 |
| Рентгеновский генератор | 1978 |
|
SU743241A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2138767C1 |
| АДАПТИВНАЯ СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ И СТАБИЛИЗАЦИИ ФИЗИЧЕСКИХ ВЕЛИЧИН | 2011 |
|
RU2457529C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2288441C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2206861C2 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ СКОРОСТЯМИ И УГЛАМИ НАВЕДЕНИЯ АРТУСТАНОВКИ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2203470C2 |
