Изобретение относится к электронной технике и может использоваться в цифровых и аналоговых автоматических системах управления, регулирования и стабилизации различных величин: температуры, давления, производительности, скорости и т.д. и может применяться в различных отраслях промышленности и в научных исследованиях.
Высокоточное управление динамическими объектами, меняющими свои параметры в ходе функционирования, актуально во многих отраслях науки и техники. Эти задачи решаются с помощью адаптивных (самонастраивающихся) систем, в которых осуществляются изменения параметров регулятора для обеспечения неизменных свойств системы вопреки изменениям свойств объекта. Адаптивные системы могут быть двух видов: системы, сохраняющие свои свойства, достигнутые в результате предварительной настройки, и системы, улучшающие свои свойства в ходе настройки и поэтому не нуждающиеся в предварительной настройке. Системы второго вида более предпочтительны и универсальны, но вследствие недостаточности алгоритмических решений они менее распространены, чем системы первого вида. Если осуществлена начальная настройка, оба вида систем могут применяться в одних и тех же целях.
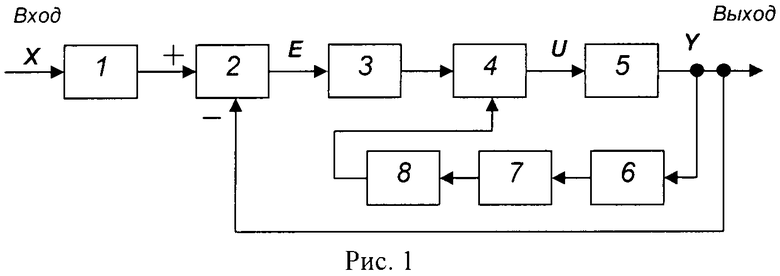
Известна адаптивная система с параметрической обратной связью, схема которой приведена на рис.1, где: 1 - фильтр, 2 - вычитающее устройство, 3 - регулятор, 4 - регулируемый усилитель, 5 - нестационарный объект, 6 - фильтр, 7 - выпрямитель, 8 - фильтр [Самонастраивающиеся системы. Справочник. / Под ред. д.т.н. П.И.Чинаева - Киев: Наукова думка, 1969, с.381]. Целью работы этой системы является достижение равенства выходного сигнала объекта Y входному сигналу системы X, несмотря на медленные изменения коэффициентов передаточной функции объекта 5, которые называются параметрическими возмущениями. Входной сигнал Х через фильтр 1 поступает на вычитающее устройство 2, на второй вход которого поступает выходной сигнал Y объекта 5. Разность этих сигналов, представляющая собой ошибку управления Е, поступает через последовательный регулятор 3 и регулируемый усилитель 4 на вход объекта 5. Поскольку параметры объекта 5 изменяются медленно, то в начальный момент работы системы последовательный регулятор 3 настраивается таким образом, чтобы замкнутая система была устойчивой и обеспечивала настолько хорошую точность автоматической подстройки выходной величины Y к входной величине X, насколько это позволяют параметры объекта. После некоторого времени накопившиеся изменения параметров объекта 5 нарушают настройку системы. Чтобы восстановить эту настройку, необходимо скомпенсировать эти изменения обратными изменениями коэффициента усиления регулируемого усилителя 4. Элементы 6, 7 и 8 обеспечивают это изменение в образуемом ими вспомогательном контуре. Для этого необходимо определить, следует ли увеличивать или уменьшать этот коэффициент и на какую именно величину, т.е. необходимо сформировать сигнал управления регулируемым усилителем 4. С этой целью в исходной системе формируются небольшие колебания выходной величины Y около ее предписанного значения, а дополнительный контур из элементов 6, 7 и 8 определяет амплитуду этих колебаний и обеспечивает ее постоянство, тем самым косвенно обеспечивает постоянство свойств основного контура управления, составленного из элементов 2, 3, 4 и 5. Для зарождения автоколебаний при начальной настройке параметры последовательного регулятора 3 подбираются так, чтобы при исходном состоянии параметров объекта в системе возникали небольшие автоколебания около равновесного состояния. Их амплитуда обеспечивается пренебрежимо малой с позиции качества функционирования системы, а их частота значительно больше, чем полоса частот сигнала, который должен быть отработан замкнутой системой. Полоса частот фильтра 6 выбирается так, чтобы пропускать только основную гармонику возникающих автоколебаний. Выпрямитель 7 выделяет амплитуду этих колебаний, а низкочастотный фильтр 8 сглаживает получаемый сигнал и подает его на управляющий вход регулируемого усилителя 4. Если изменения параметров объекта 5 в основном касаются его коэффициента усиления, то восстановление исходной амплитуды автоколебаний будет обеспечено лишь в том случае, если изменения коэффициента усиления регулируемого усилителя 4 полностью скомпенсируют эти изменения коэффициента усиления объекта 5. Таким образом, при выполнении этого предположения о свойствах объекта 5 общий коэффициент элементов 4 и 5 сохраняется постоянным, что обеспечивает устойчивую работу основного контура, образованного элементами 2, 3, 4 и 5. Частота автоколебаний должна быть в 3-4 раза больше максимальной частоты спектра входного сигнала и находиться вне спектра частот помех, действующих на систему. Фильтр 1 осуществляет фильтрацию входного сигнала для устранения из него компонент вблизи частоты автоколебаний.
Основной недостаток этой системы состоит в необходимости обеспечения полосы частот замкнутого контура много большим, чем требуется для отработки полезного сигнала X. В этом случае приходится использовать лишь часть возможностей системы, искусственно снижая ее быстродействие. Таким образом, средство решения задачи противоречит поставленной цели, которая состоит в обеспечении наибольшей полосы частот и наивысшей точности системы при изменяющихся параметрах объекта.
Другим недостатком этой системы является узкая область применения, поскольку предполагается, что в объекте 5 изменятся только коэффициент усиления, и, следовательно, достижение стабильности амплитуды автоколебаний тождественно достижению стабильности системы, что не для всех видов объектов выполняется.
Третьим недостатком этой системы является необходимость предварительной настройки регулятора 3, что требует детального знания математической модели объекта 5 и, следовательно, значительных его предварительных исследований (данная система относится к первому виду адаптивных систем).
Четвертым недостатком этой системы является наличие колебаний выходного сигнала, которые снижают точность обеспечения равенства между входным сигналом X и выходным сигналом Y.
Наиболее близким к заявляемой системе является система, схема которой приведена на рис.2, где
9 - вычитающее устройство;
10 - регулируемый усилитель;
11 - сумматор;
12 - объект;
13 - генератор;
14 - фильтр;
15 - выпрямитель;
16 - фильтр;
17 - сумматор.
[Самонастраивающиеся системы. Справочник. / Под ред. д.т.н. П.И.Чинаева - Киев: Наукова думка, 1969, с.377]. Эта система принята за прототип изобретения. Входом системы является положительный вход вычитающего устройства, выходом системы является выход объекта. Элементы 9, 10 и 11 вместе с объектом 12 образуют систему автоматического регулирования с отрицательной обратной связью. При первоначальной настройке подбирается величина внешнего сигнала R, подаваемого через один из входов сумматора 17 на регулируемый усилитель 10. Для того чтобы изменения коэффициента усиления объекта 12 компенсировались обратными изменениями коэффициента усиления регулируемого усилителя 10, в систему включен дополнительный контур, в который входят элементы 14, 15, 16 и 17, а также их действие обеспечивает генератор 13. С этой целью от генератора 13 через сумматор 11 в контур вводятся гармонические колебания Z, которые частично подавляются контуром из элементов 11, 12, 9 и 10 за счет действия отрицательной обратной связи, а их остаток присутствует на выходах всех элементов, в том числе на выходе регулируемого усилителя 10. Последовательно соединенные фильтр 14, настроенный на частоту этих колебаний, выпрямитель 15 и фильтр низких частот 16 осуществляют детектирование амплитуды этих колебаний. Усиленная величина этой амплитуды через сумматор 17 поступает на регулируемый усилитель 10, изменяя его коэффициент пропускания таким образом, чтобы амплитуда колебаний, присутствующих в сигнале U на выходе этого усилителя 10, была постоянной. В результате первоначальной настройки за счет изменений сигнала R коэффициент усиления регулируемого усилителя 10 делается таким, чтобы система была устойчивой и обеспечивала настолько высокую точность и быстродействие, насколько это позволяют параметры объекта 12. После того как в объекте 12 накапливаются изменения его коэффициента усиления, это приведет к изменению амплитуды гармонической компоненты сигнала на выходе регулируемого усилителя 10. Действие дополнительного контура стабилизации этой амплитуды, составленного из элементов 14, 15, 16 и 17, осуществляет такое изменение коэффициента усилителя 10, чтобы значение этой амплитуды было неизменным. Поскольку это достигается только при восстановлении исходного значения коэффициента усиления всего контура, равного произведению коэффициента усиления объекта 12 и коэффициента усиления усилителя 10, то в этом случае достигается также восстановление исходных свойств основного контура управления, образуемого элементами 9, 10, 11 и 12. Таким образом, поставленная задача стабилизации коэффициента усиления основного контура стабилизации, составленного элементами 9, 10, 11 и 12, решена [Самонастраивающиеся системы. Справочник. Под ред. д.т.н. П.И.Чинаева. Киев. Наукова думка. 1969, с.377]. В итоге изменения коэффициента усиления объекта 12 компенсируются обратными изменениями коэффициента усиления регулируемого усилителя 10, общий коэффициент основного тракта регулирования остается неизменным, чем и достигается сохранение свойств изначальной настройки основного контура управления системы.
Основными недостатками прототипа являются недостаточная точность ее работы и недостаточная эффективность самонастройки.
Недостаточная точность порождена тем, что в рабочем состоянии в системе должны происходить колебания.
Недостаточная эффективность настройки имеет место вследствие того, что используется гипотеза о том, что среди всех параметров объекта изменяется, в основном, лишь его коэффициент усиления, а также предполагается, что первоначальная настройка осуществлена наилучшим образом. Эта гипотеза не всегда выполняется, прямой зависимости между амплитудой колебаний и качеством настройки системы зачастую нет.
Следствием этого является узкая область применения этого метода и необходимость предварительной настройки системы по некоторым дополнительным критериям качества ее функционирования, что также является недостатками этой системы.
Таким образом, прототип не обеспечивает достаточно высокого быстродействия и достаточно высокой точности, а также требует предварительной качественной настройки.
Предлагаемое изобретение решает задачу повышения эффективности самонастройки и достижения большей точности системы с целью повышения точности и быстродействия при изменениях параметров объекта.
Поставленная задача решается тем, что предлагается адаптивная система с обратной связью, содержащая последовательно соединенные объект, вычитающее устройство и управляемый усилитель, управляющий вход которого соединен с выходом сумматора, которая содержит последовательно соединенные между выходом вычитающего устройства и входом сумматора анализатор ошибки, синхронный детектор, нелинейный элемент, интегратор и регулятор коэффициента, а также генератор, выход которого соединен со вторыми входами синхронного детектора и сумматора, причем выход управляемого усилителя соединен со входом объекта, а входом системы является положительный вход вычитающего устройства, при этом выходом является выход объекта.
Нелинейный элемент может находиться на входе или на выходе анализатора ошибки.
На входе и/или на выходе анализатора ошибки может быть установлен дополнительный нелинейный элемент.
По сути необходимо в состав системы ввести анализатор ошибки и обеспечить настройку регулятора на наилучшее качество за счет действия дополнительного контура обратной связи, образуемого синхронным детектором, интегратором, нелинейным элементом, регулятором коэффициента и сумматором, а также генератором, выход которого соединен со вторыми входами синхронного детектора и сумматора.
Повышение точности достигается устранением колебаний выходной величины в рабочем режиме. Повышение эффективности достигается применением критерия, непосредственно связанного с показателем качества замкнутой системы, который вычисляется непрерывно или периодически в ходе функционирования системы.
Схема предлагаемой системы показана на рис.3.
Устройство содержит:
18 - вычитающее устройство;
19 - управляемый усилитель;
20 - объект;
21 - генератор;
22 - анализатор ошибки;
23 - синхронный детектор;
24 - интегратор;
25 - нелинейный элемент;
26 - регулятор коэффициента;
27 - сумматор.
Входом системы является положительный вход вычитающего устройства 18. Выходом устройства является выход объекта 20.
В качестве анализатора ошибки 22 может быть использован, например, выпрямитель.
В качестве синхронного детектора 23 может быть использован, например, множитель сигналов с последовательно включенным фильтром низких частот.
В качестве нелинейного элемента 25 может быть использован, например, элемент типа «зона нечувствительности».
В качестве регулятора коэффициента 26 может быть взят, например, аналоговый или цифровой интегратор или иной регулятор, обеспечивающий достаточную устойчивость и точность дополнительного контура стабилизации, образуемого элементами 22, 23, 24, 25, 26, 27 и воздействующего на элемент 19.
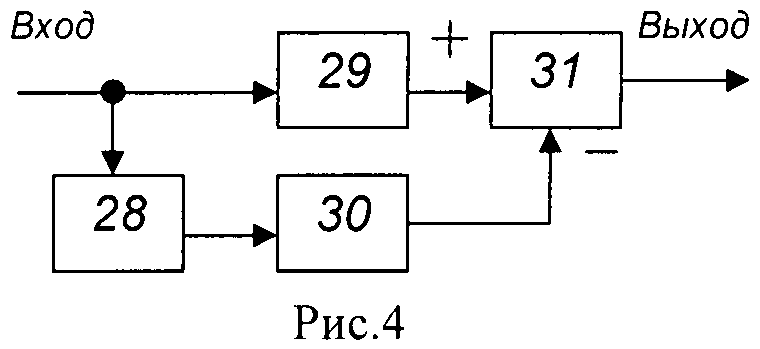
Интегратор 24 может быть выполнен как вычислитель скользящего среднего, т.е. устройство, вычисляющее интеграл в скользящих пределах от t-Т до t, где t - текущее время, T - интервал времени усреднения. Это устройство может быть реализовано, например, в виде вычитающего устройства с двумя интеграторами на входах, причем один из этих двух интеграторов включатся с задержкой на время Т по сравнению с другим интегратором, как показано на рис.4. На этом рисунке: 28 - устройство задержки сигнала на величину T; 29 и 30 - интеграторы; 31 - вычитающее устройство.
Вся система полностью или частично может быть реализована на цифровой электронной технике, например на базе цифрового сигнального процессора.
Эта система работает следующим образом.
При исходных фиксированных параметрах объекта 20 элементы 18, 19 и 20 образуют обычную систему автоматического управления. А именно: входной сигнал Х поступает через положительный вход вычитающего устройства 18 и через управляемый усилитель 19 на вход объекта 20; выходной сигнал Y объекта поступает на вычитающий вход вычитающего устройства 18, на выходе которого формируется сигнал ошибки Е. Управляемый усилитель 19 служит регулятором в основном контуре и обеспечивает требуемую точность и быстродействие этого контура при первоначальной настройке и пока параметры объекта 20 остаются неизменными. В случае достаточно эффективной работы основного контура выходной сигнал объекта Y равен входному сигналу системы X, поэтому сигнал ошибки Е на выходе вычитающего устройства 18 пренебрежимо мал. Эта величина анализируется трактом, состоящим из анализатора ошибки 22, синхронного детектора 23, интегратора 24, нелинейного элемента 25, регулятора 26 и сумматора 27. Поскольку в тракте присутствует нелинейный элемент 25 с зоной нечувствительности, его выходной сигнал равен нулю, если входной сигнал лежит в заранее заданном небольшом диапазоне вблизи нуля. Поэтому на вход регулятора 26 подается также нулевой сигнал, регулятор 26 не воздействует на управляемый усилитель 19 и этот усилитель не изменяет своего коэффициента усиления. Генератор 21 формирует гармонический сигнал, который поступает на вход синхронного детектора 23 и на вход сумматора 27. Выходной сигнал синхронного детектора 23, равный произведению его входных сигналов, в данном случае остается пренебрежимо малым. Действие сигнала с выхода генератора 21, подаваемого на вход сумматора 27, состоит в том, что коэффициент усиления регулируемого усилителя 19 изменяется на небольшую добавку, изменяющуюся по этому гармоническому закону. Это небольшое изменение коэффициента усиления практически не влияет на действе основного контура управления, составленного элементами 18, 19 и 20.
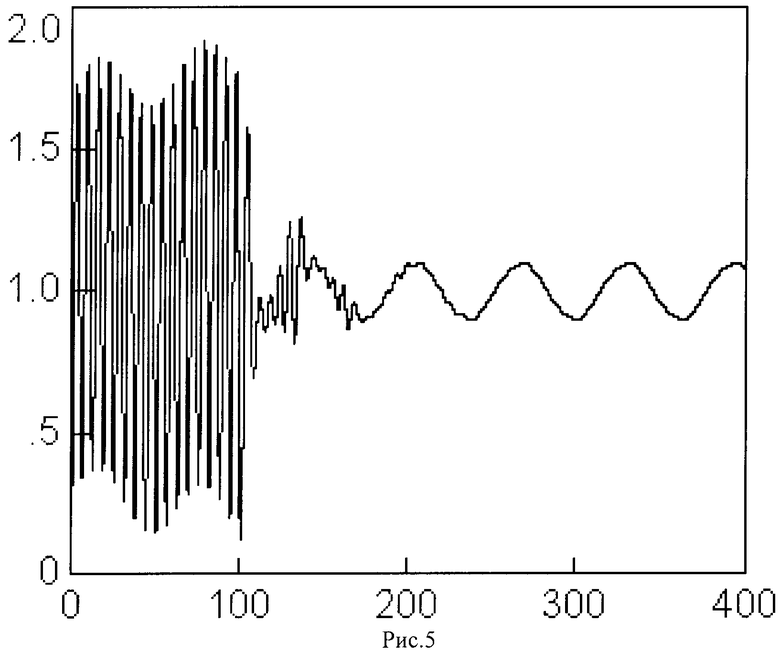
Нами путем моделирования показано, что в некоторых случаях такая модуляция коэффициента усиления регулятора не только не мешает, но даже оказывает стабилизирующее влияние на устойчивость системы автоматического регулирования. Так, например, на рис.5 показан выходной сигнал системы, на вход которой был подан сигнал X(t)=1+0,1cos(0,1t). Эта система в начальный момент находилась в неустойчивом состоянии, но после введения девиации коэффициента усиления (в момент t=100) она стала устойчивой, ее выходной сигнал стал примерно равным входному сигналу: Y(t)≈X(t). Модели объекта и регулятора в рассмотренном примере имеют вид:
 , U(s)=K1[X(s)-Y(s)], K1=var.
, U(s)=K1[X(s)-Y(s)], K1=var.
Здесь величины Y(s), U(s) X(s) - преобразования Лапласа от сигналов на выходе U(t) и входе Y(t) объекта, а также на входе системы X(t). Для коэффициента K1 была применена модуляция коэффициента в соответствии с соотношением:
K1=10+4sint.
Если бы входной сигнал системы X(t) не имел девиации, то и выходной сигнал также был бы постоянным, что также подтверждено моделированием. Во всех случаях небольшая девиация коэффициента усиления системы не ухудшает его устойчивости и не увеличивает ошибку слежения E(t). Таким образом, при достаточно высоком качестве работы основного контура, составленного из элементов 18, 19 и 20, действие дополнительного контура, составленного из остальных элементов системы, никак не влияет на основной контур, а также оно не вносит девиаций выходного сигнала Y, чем обеспечивается одна из причин повышения точности системы.
После того как накопятся существенные изменения параметров объекта и качество системы в целом ухудшится, изменения коэффициента усиления регулируемого усилителя 11 начнут влиять на значение ошибки E(t). Увеличение коэффициента усиления регулируемого усилителя 11 может улучшать или ухудшать качество системы, и заранее неизвестно, в какую сторону следует изменять этот коэффициент. Например, увеличение этого коэффициента может нарушить устойчивость системы, что вызовет увеличение абсолютной величины ошибки слежения E(t), а уменьшение этого коэффициента может вернуть устойчивость, что вызовет уменьшение величины ошибки E(t). Но может возникнуть и обратная ситуация, при которой уменьшение коэффициента увеличит ошибку по величине, а его увеличение уменьшит эту ошибку. При наилучшей настройке этого коэффициента и увеличение, и уменьшение его вызовет увеличение абсолютной величины ошибки, поэтому наилучшая настройка является наиболее желательной, а обеспечение ее повышает точность и быстродействие системы автоматического регулирования в целом. Действие дополнительного контура, образуемого элементами 22, 23, 24, 25, 26 и 27, предназначено для обеспечения этой наилучшей настройки коэффициента усиления регулируемого усилителя 19.
Пусть, например, параметры объекта 20 изменились так, что увеличение коэффициента усиления регулируемого усилителя 19 уменьшит абсолютную величину ошибки, а его уменьшение увеличит эту ошибку. Генератор 21 формирует сигнал, который, воздействуя на управляемый усилитель 19, периодически увеличивает и уменьшает его коэффициент усиления. Вследствие этого ошибка E(t) на выходе вычитающего устройства 18 будет синхронно с этим сигналом увеличиваться и уменьшаться по абсолютной величине. Эти изменения будут формироваться на выходе анализатора ошибки 22, а на выходе синхронного детектора 23 будет осуществляться детектирование этой зависимости. Действительно, если бы на выходе анализатора ошибки 22 был постоянный сигнал, то после его умножения на гармонический сигнал на синхронном детекторе 23 на выходе синхронного детектора 23 формировался бы знакопеременный симметричный сигнал, который после интегрирования на интеграторе 24 давал бы в итоге пренебрежимо малый сигнал. Если же в выходном сигнале анализатора ошибки 22 стала присутствовать переменная компонента, изменяющаяся синхронно со вторым входным сигналом синхронного детектора 23, то после перемножения этих компонент на выходе синхронного детектора будет формироваться постоянная величина, которая изменит выходной сигнал интегратора 24. Этот сигнал, если его величина больше, чем зона нечувствительности нелинейного элемента 25, сформирует ненулевой сигнал на вход регулятора 26 и через сумматор 27 будет воздействовать на регулируемый усилитель 19, изменяя его коэффициент усиления. Если за счет корректного расчета регулятора 26 данный контур сделан устойчивым, то действие такой обратной связи обеспечит изменение коэффициента усиления управляемого усилителя 19 в таком направлении, чтобы периодическая компонента сигнала на выходе анализатора ошибки 22 после ее детектирования синхронным детектором 23 и усреднения интегратором 24 стала равной нулю. Это достигается при наименьшей абсолютной величине сигнала ошибки E(t), т.е. при наилучшей настройке коэффициента усиления управляемого усилителя 19.
Таким образом, действием дополнительного контура обеспечивается наилучшая настройка коэффициента усиления управляемого усилителя 19, обеспечивающая наименьшее значение функции, описывающей качество системы и вычисляемой анализатором ошибки 22, например усредненный модуль ошибки E(t). Это обеспечивается при максимальной точности системы и наиболее широкой полосе частот при условии сохранения ее наилучшей устойчивости.
В результате повышаются быстродействие, точность и запас устойчивости всей системы.
Кроме того, данная система не требует первоначальной настройки, поскольку действие дополнительного контура, образуемого элементами 22, 23, 24, 25, 26, 27 и 21, направлено не на восстановление исходных параметров настройки, а на достижение минимального значения интеграла от модуля ошибки.
Таким образом, в предлагаемой системе обеспечена наилучшая настройка коэффициента регулируемого усилителя 19, что обеспечивает наибольшую точность и наилучшее быстродействие, которые только могут быть достигнуты с имеющимися параметрами объекта. Данная система относится ко второму виду адаптивных систем, не требующих первоначальной настройки, хотя и не запрещает ее.
Нелинейный элемент 25 может быть выполнен в виде гладкой или кусочно-линейной зависимости, имеющей зону нечувствительности, например, зависимость между его выходным сигналом U2 и входным сигналом U1 может быть задана в следующем виде:
Такое устройство может быть реализовано на основе аналоговой или цифровой техники, например на основе операционного усилителя с соответствующими цепями обратной связи, с применением диодов или стабилитронов. Этот нелинейный элемент может быть перемещен или продублирован на входе и (или) на выходе элемента 22 (анализатор ошибки) без ухудшения полезных свойств системы.
Таким образом, предлагаемая система обеспечивает системе повышенную точность и быстродействие.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| Самонастраивающийся регулятор | 1980 |
|
SU940130A1 |
| Самонастраивающийся регулятор | 1981 |
|
SU960731A1 |
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
| Адаптивный регулятор | 1984 |
|
SU1149213A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Устройство для автоматической настройки катушки индуктивности с подмагничиванием | 1978 |
|
SU771795A1 |
| КОМПЕНСАТОР ШУМОВОЙ ПОМЕХИ | 1998 |
|
RU2137297C1 |
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 2014 |
|
RU2571371C2 |

Изобретение относится к электронной технике и предназначено для использования в цифровых и аналоговых автоматических системах управления, регулирования и стабилизации различных величин: температуры, давления, производительности, скорости и т.д. Адаптивная система с обратной связью содержит последовательно соединенные объект, вычитающее устройство и управляемый усилитель, управляющий вход которого соединен с выходом сумматора. В состав устройства также входят последовательно соединенные между выходом вычитающего устройства и входом сумматора анализатор ошибки, синхронный детектор, нелинейный элемент, интегратор и регулятор коэффициента, а также генератор, выход которого соединен со вторыми входами синхронного детектора и сумматора, причем выход управляемого усилителя соединен со входом объекта, а входом системы является положительный вход вычитающего устройства, при этом выходом является выход объекта. Технический результат изобретения заключается в повышении эффективности самонастройки и достижении большей точности адаптивной системы с целью повышения точности и быстродействия при изменениях параметров объекта. 2 з.п. ф-лы, 5 ил.
1. Адаптивная система для регулирования и стабилизации физических величин, содержащая последовательно соединенные объект, вычитающее устройство и управляемый усилитель, управляющий вход которого соединен с выходом сумматора, отличающаяся тем, что она содержит последовательно соединенные между выходом вычитающего устройства и входом сумматора анализатор ошибки, синхронный детектор, нелинейный элемент, интегратор и регулятор коэффициента, а также генератор, выход которого соединен со вторыми входами синхронного детектора и сумматора, причем выход управляемого усилителя соединен со входом объекта, а входом системы является положительный вход вычитающего устройства, а ее выходом является выход объекта.
2. Система по п.1, отличающийся тем, что нелинейный элемент находится на входе или на выходе анализатора ошибки.
3. Система по п.1, отличающийся тем, что на входе и/или на выходе анализатора ошибки установлен дополнительный нелинейный элемент.
| РЕГУЛЯТОР ДЛЯ СИСТЕМЫ С ОБРАТНОЙ СВЯЗЬЮ | 2008 |
|
RU2368933C1 |
| Электрический привод машин-орудий | 1948 |
|
SU76719A1 |
| Незамкнутая гидромуфта | 1951 |
|
SU93994A1 |
| RU 2002289 C1, 30.10.1993 | |||
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ | 1992 |
|
RU2068196C1 |
| УСТРОЙСТВО АДАПТАЦИИ РЕГУЛЯТОРА | 2005 |
|
RU2285943C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2368934C2 |
| DE 3239015 A1, 26.04.1984 | |||
| DE 4329759 A1, 23.10.1997 | |||
| DE 19612884 A, 09.10.1997 | |||
| DE 4329759 A1, 09.03.1995 | |||
| US 4675804 A, 21.04.1986 | |||
| US 4407013 A, 27.09.1983 | |||
| WO 9732270 A, 04.09.1997 | |||
| СПОСОБ ГЛУШЕНИЯ СКВАЖИН | 2010 |
|
RU2431736C1 |
| EP 0974880 B1, 26.01.2000. | |||

