4 IsD
;о
00 со
Изобретение относится к манипуляторостроению и может быть использовано в Качестве исполнительных органов (ИО) манипуляторов и роботов.
Одной из основных проблем в этой области является проблема создания исполнительных органов, приближающихся по своим параметрам к руке человека.
Известна рука манипулятора, содержащая подвижные звенья, выполненные в виде цилиндрических корпусов с концентрически расположенными в них трубчатыми валами, на концах которых жестко закреплены зубчатые колеса, причем каждый цилиндрический корпус подвижного звена связан с цилиндрическим тройником, причем в троиниках расположены дифференциальные механизмы, включающие сателлитные конические зубчатые колеса для передачи транзисторных движений через звенья 1. Недостатками известного устройства являются расщепление плечевого звена на два параллельных участка, эксцентричное рас шложение кистевого звена относительно продольной оси предплечья, повышенная масса и габариты плеча, недостаточно оптимальная силовая взаимосвязь движений. Целью изобретения является снижение энерго- и металлоемкости и повыщение точности за счет облегчения конструкции. Цель достигается тем, что рука манипулятора, содержащая подвижноые звенья, выполненные в виде цилиндрических корпусов с концентрически расположенными в них трубчатыми валами, на концах которых жестко закреплены зубчатые .колеса, причем каждый цилиндрический корпус подвижного звена связан с цилиндрическим тройником, причем в тройниках расположены дифференциальные механизмы, включающие саттелитные конические зубчатые колеса для передачи транзитных движений через звенья, дифференциальные механизмы снабжены пустотелыми жестко соединенными по середине перемычками силовыми водилами, имеющими зубчатые колеса, и размещенными на торцах тройников, причем на цилиндрических тройниках выполнены зубчатые венцы, при этом тройники и силовые водила дифференциальных механизмов образуют вращательные пары, оси которых являются осями изгиба поступающего .подвижного звена, при этом передаточные отнощения цилиндрических зубчатых колес водил равны передаточному отнощению зубчатых венцов тройников предыдущего и последующего подвижного звена. На чертеже показана кинематическая структура двухшарнирного участка предлагаемой руки манипулятора. Устройство содержит подвижные звенья 1, 2 и 3 выполненные в виде цилиндрических корпусов с концентрически расположенными в них трубчатыми валами, на концах которых жестко закреплены ведущие и ведомые конические зубчатые колеса..
Каждое подвижное звено оканчивается цилиндрическими тройниками 4, 5, б и 7, соединенными цилиндрическими корпусами либо жестко, либо через подщипники. (В последнем случае образуется вращательная пара относительно продольной оси подвижного звена). Внутри тройников 4-7 равномерно по обе стороны от продольной оси расположены сателлитные конические зубчатые колеса трехзвенных дифференциальных механизмов, служащих для передачи через шарнир транзитных движений. Вдоль по обе стороны от двух соседних тройников 4, 5 и 6, 7, образующих один щарнир, расположены силовые водила 8-11. Силовые водила выполнены в виде полых корпусов с жестко закрепленными на концах трубчатыми валами 1219. Трубчатые валы 12-19 соосно установлены в тройниках 4-7 и образуют с ними вращательные пары, оси которых являются осями изгиба подвижного звена 1-3. Причем суммарный угол изгиба подвижного звена 1-3 складывается из угла изгиба подвижного звена 1-3 относительно нижней оси щарнира и из угла изгиба силовых водил 8-11 относительно верхней оси щарнира. Периферийные сателлитные зубчатые колеса 20-23, расположенные на горизонтальных осях тройников 4 и 6, жестко посажены на трубчатые валы 12, 13 и 16, 17 силовых водил 8,9 и 10,11. Сателлитные зубчатые колеса трехзвенных дифференциальных механизмов транзитных движений через концент 1ически расположенные трубчатые валы 12-19 жестко соединены с цилиндрическими зубчатыми колесами, расположенными в полых корпусах силовых водил 8-11. Верхние и нижние цилиндрические зубчатые колеса одного ряда сцеплены друг с другом через промежуточную паразитную передачу. На цилиндрической части тройников 4-7 по обе стороны от продольной оси имеются зубчатые секторы, попарно входящие в зацепление друг с другом. Для компенсации противоположно направленных осевых сил, действующих вдоль горизонтальных осей щарниров, образующих Р передаче вращающих моментов попарно работающими сателлитами зубчатыми колесами 20-23 и для придания требуемой жесткости щарнирам, силовые водила 8 и 9, а также 10 и 11 жестко соединены с двух противоположных сторон перемычками 24. Герметизация щарниров,, как и в известном устройстве, осуществляется для движений изгиба подвижных звеньев - по внешним диаметрам трубчатых валов 12-19; для движений вращения подвижных звеньев - по внешним или внутренним диаметрам продольных цилиндров т,ройников 4,5 и 7. Рука манипулятора работает следующим образом.
При вращении двух ведущих трубчатых валов 25 и 26 в разные стороны с одинаковой по величине скоростью сателлитные зубчатые колеса 20 и 21 поворачиваются относительно горизонтальной оси шарнира в одну сторону, в ту же сторон.у разворачиваются и жестко связанные с ними силойые водила 8 и 9. Поворот водил 8 и 9 относительно верхней горизонтальной оси шарнира и неподви,жн6м тройнике 4 вызывает поворот в ту же сторону нижнего тройника 5 относительно его горизонтальной оси.
Характерно отметить, что предельная величина угла изгиба может составить 1180°, что является преимуществом предлагаемой схемы устройства.
При вращении трубчатых валов 25 и 26 с одной и той же скоростью и в одном и том же направлении сателлитные зубчатые колеса 20 и 21, а с ними и силовые водила 8 и 9, стремятся развернуться в разных направлениях, но так как это невозможно (водила связаны жесткими перемычками 24), то образуется вращающий момент, приводящий во вращейие тройник 4 шарнира относительно его продольной оси. Так обеспечивается вращение шарнира относительно продольной оси предыдущего подвижного звена или продольной неподвижного основания.
Вращением ведущих трубчатых валов 27 и 28 обеспечивается работа нижнего шарнира. Принцип его работы аналогичен рассмотренному принципу работы верхнего шарнира.
Каждое автономное движение в шарйире (вращение шарнира относительно продольной оси предыдущего подвижного звена, изгиб последующего подвижного звена относительно горизонтальных осей щарнира) обеспечиваются совместной работой двух приводов. Причем при одинаковых скоростях приводов существует либо движение вращения, либо движение изгиба, а при разных скоростях в щарнире одновременно существуют оба вида движений.
Если требуется исключить какоеЛибо из движений, то два соответствующих трубчатых вала, например 25 и 26, при этом должны быть состыкованы с одним приводом таким образом, чтобы обеспечивалось либо их одинаковое и согласное вращение (сохраняется только вращение шарнира относительно продольной оси предыдущего звена), либо одинаковые по величине и про-тивоположные по направлению вращения (сохраняется только движение изгиба пocлe дуюш,его подвижного звена относительно горизонтальных осей шарнира).
Из рассмотрения принципа работы пред . лагаемого устройства следует, что при вращении шарнира относительно продольной
оси предыдущего звена и остановленньЬ(
приводах всех последующих движений все
ведущие трубчатые валы 27 и 28, кроме
двух периферийных 25 и 26, остановлены,
все сателлитные зубчатые колеса 20 и 21
тройника 4 будут паразитно обкатываться вокруг соответствующих зубчатых колес остановленных трубчатых валов 25 и 26. Таким образом, в предлагаемом устройстве,
как и в известном, существует пар взитнал
кинематическая взаимосвязь движений в
последующих звеньях при вращении предыдущих.
При выполнении движений изгиба подвижного звена относительно оси шарнира и остановленных приводах всех последующих подвижных звеньев 2 и 3, все-сателлитные зубчатые колеса 20 и 21 тройника 4 неподвижны, а цилиндрические паразитные зубчатые колеса при повороте силовых водил 8 и 9 обкатываются относительно неподвижных зубчатых цилиндрических
колес, жестко сочлененных трубчатыми валами с сателлитами коническими колесами 20 и 21 тройника 4. Очевидно, что сателлитные зубчатые колеса 22 и 23 тройника 5 будут поворачиваться синфазно с ним,если обеспечить равенство по величине и по знаку передаточных отношений между зубчатыми секторами тройников 4 и б и ведущим и ведомым цилиндрическими зубчатыми колесами верхней и нижней осей шарнира. Таким образом, при равенстве отношений в манипуляторе отсутствует паразитная кинематическая взаимосвязь последующих движений при изгибу предыдущих подвижных звеньев.
Отсутствие кинематической взаимосвязи при изгибе подвижных звеньев создает в
предлагаемом устройстве возможность максимального использования силовой взаимосвязи.
Это более оптимальный вариант распределения нагрузок по приводам движений. В результате потребляемая мо цность предлагаемого устройства при прочих равных условиях, более чем на 30% ниже , чем у известных и в 3 раза ниже чем у манипуляторов со встроенными в суставы приводами. При этом обеспечивается минимум массогабаритных параметров руки при высокой надежности работы в экстремальной среде.
1
rxJ
9 Z1
-x
4: 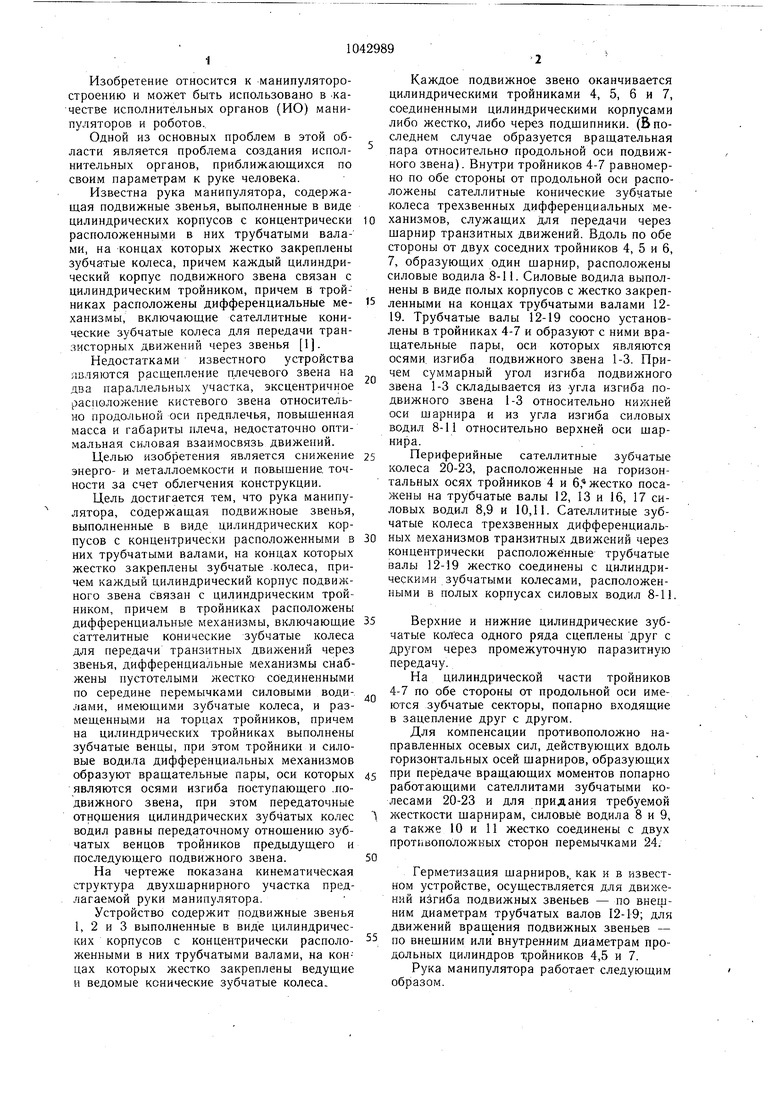

| название | год | авторы | номер документа |
|---|---|---|---|
| Механическая рука | 1983 |
|
SU1090545A1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| Шарнир манипулятора | 1984 |
|
SU1189678A1 |
| Рука манипулятора | 1984 |
|
SU1220781A1 |
| Манипуляционное устройство | 1983 |
|
SU1122500A1 |
| Шарнир манипулятора | 1982 |
|
SU1047681A1 |
| Шарнир манипулятора | 1984 |
|
SU1180260A1 |
| Манипулятор | 1980 |
|
SU891425A1 |
| Манипулятор | 1979 |
|
SU831615A1 |

РУКА МАНИПУЛЯТОРА, содержащая подвижные звенья, выполненные в виде цилиндрических корпусов с концентрически расположенными в них трубчатыми валами, на концах которых жестко, закреплены зубчатые колеса, причем каждый цилиндрический корпус подвижного звена связан с цилиндрическим тройником, причем в тройниках расположены дифференциальные механизмы, включающие сателлитные конические зубчатые колеса для передачи транзитных движений через звенья, отличающаяся тем, что, с целью снижения энерго- и металлоемкости и повыщения точности за счет облегчения конструкции, дифференциальные механизмы снабжены пустотелыми жестко соединенными по середине перемычками силовыми водилами, имеющими зубчатые колеса и размещенными на торцах тройников, причем на цилиндрических тройниках выполнены зубчатые венцы, при этом тройники и силовые водила дифференциальных механизмов образуют вращательные пары, оси которых являются осями.изгиба последующего подвижного звена, при этом передаточные отношения цилиндричеса S ких зубчатых колес водил равны передаточному отнощению зубчатых венцов тройни(Л ков предыдущего и последующего подвижного звена.
/4
/
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Электромеханическое обеспечение автоматических комплексов | |||
| Межвузовский сборник, Новосибирск, НЭТИ, 1979, с | |||
| Электрический выключатель, действующий в заранее устанавливаемый момент времени | 1924 |
|
SU2739A1 |
