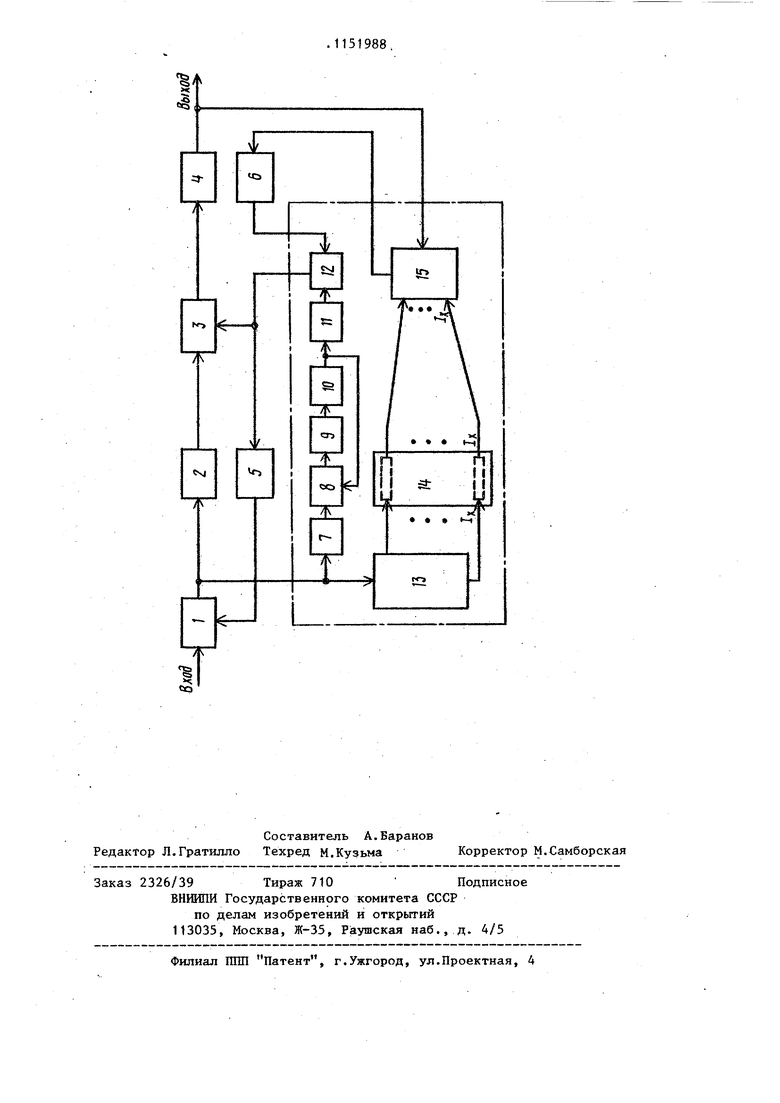
Изобретение относится к области вычислительной техники, может быть использовано при пространственной об работке радиолокационных сигналов, обработке и передаче изображений, об работке сейсмических данных, гравита ционных, магнитных и температурных полей. В основу предлагаемого изобретения положен принцип, являющийся распространением временной Калмановской фильтрации случайных сигналов на слу чай многомерных пространственных процессов, корреляционная функция которых разделима. Многомерная нестационарная модель измеряемого пространственного процесса соответствует сис теме разностных уравнений )),(.-,n,)v{vg olO.H) ) ( V.)v(4.S)44.S)v(s.,g -x(i,,0)vW Ox.4).S) (x.S) , где x(iy, о) - граничное условие, являющееся случайньв4 процессом, корре лированным по оси f с известной корреляционной функцией; и(о, iy) - граничное условие, являющееся 6ejuiiM случайным процессом по оси ijj с известной корреляционной функцией; q(ij,, i) - гj.-мерный вектор-сто бец пространственног белого шума; x(i, i,() - Г5,-мерный вектор состояний;D(i, ij) - Гу- мерный вектор сто бец порождающего вспомогательного про цесса: белый по оси Iy и коррелированный по оси ,ц ; 2(1, i) г мерный вектор-сто бец наблюдаемого про цесса; ф„(1х, i,) - r. -переходная мат рица состояний по оси r,j(ijj, i,) - r -Гц-матрица возмущений по оси ;Ц; Ф(1, ij) - Tjj-nepexoAHaH матрица состояний по оси i,; ; r(ij(i ij) - ГцГо-матрица возму- щений по оси Ix ; H(i, i) - r -r -матрица размерностей. Реально наблюдаемые поля обычно ограничены по крайней мере по одной из осей (напрш ер, при радиолокационных наблюдениях поле ограничено с одной стороны максимальной дальностью, а с другой стороны - полным повотором антенны), Такие пространственные процессы соответствуют модели (1). Первое уравнение системы (1) формирует из белого пространственного шума вспомогательный процесс U: коррелированный по оси 1 и белый По оси i,. Второе уравнение - процесс, коррелированный по обеим осям. При фиксированном значении 1 система разностных уравнений (1) соответствует модели наблюдаемого процесса, положенной в основу построения фильтра Калмана-Бьюси. Целью изобретения является увеличение точности (оценки измеряемого процесса:) . На чертеже показана блок-схема дискретного фильтра. Дискретный фильтр содержит сумматор 1 умножитель 2, сумматор 3, блок 4 элементов задержки, умножители 5 7, сумматор В, умножитель 9, блок 10 элементов задержки, умножитель 11, сумматор 12, линию 13 задержки, группу умножителей 14 и сумматор 15. Предлагаемый фильтр учитьшает корреляционные свойства измеряемого процесса как по оси i, так и по оси , и при фиксировании iy дает более точную оценку, чем фильтр Капмана-Бьюси при Измерении того же процесса, причем для этого Необходимо производить обработку пропшой оцен|КИ X (fx , {./Ц.д ,1) и последних 1 значений наблюдаемо го процесса (I,+1 Размер поля по оси i), где запись и и/x-i з5 означает оценку процесса, основанную на всех предыдущих иаб1людениях { lVinv.z(v,S)..Mb предлагаемый дискретньй фильтр описывается системой разностных уравнений)- (х ) .(xV1 u) 3 4%.S) vS-)(4H,)p(i,,i,/vi, Л. xOxnv.)x3j(i..b) 44hiJx.J3 14bS )V(S) u(ix,) (y 4V / )(NlPOx.Vv S+)40x-S4N) (4S) l 4VS)44 pSH)-K.).(Vi/ /V.V).W ч SOx.-y.J ibhV(4n,)ixb)v /p;4ix.iv)-. (0 Ku(v.4-4,Vi)y(v.S).) ) коэффициенты фильтра, выбор которых производится в соответствии с испол зуемым критерием оптимальности; X (1ц ij+t) - оценка состояния динамической системы; 0{ix, i() - пространственный белый шум; H(iy, 1,+1) - матрица измерений; x 1ФЧ - матрицы переходов состояний по осям Ix и 1 соответственно; Z, Zj - задержка на один дис рет пространства по направлениям обработ ки 1 и 1 соответственно. Работа дискретного фильтра произ водится в соответствии с алгоритме описанньм уравнениями (2-7). 88 Входной наблюдаемый процесс 7 и оценка экстраполяции измеряемого про цесса через умножитель 5 поступают на первый и второй входы сумматора 1, реализующего формирование ij-процесса (уравнение 5). В соответствии с уравнением (2) с выхода сумматора 1 )процесс через умножитель 2 поступает на первый вход сумматора 3, а на второй вход - оценка экстраполяции измеряемого процесса. Оценка фильтрации с выхода сумматора 3 через блок задержки на один шаг по первому направлению фильтрации 4 поступает на выход устройства. Одновременно с выхода сумматора 1 -О -процесс поступает на линию 13 задержки по второму направлению фильтрации, содержащую I ступеней задержки с отводами, с которых зад ержанйый -процесс через соответствующие умножители группы умножителей 14 поступает на 1 -входы сумматора 15. На (1х-«-1)-й вход сумматора/15 поступает выходной процесс, при этом на выходе сумматора 15 реализуется выражение в квадратных правой части уравнения (3). Рекурсивное уравнение (4) реализуется последовательным соединеиием умножителя 7, сумматора 8, умножителя 9, блока 10 элементов задержки по второму направлению фильтрации, а также обратной связью между выходом блока 10 элементов задержки и вторым входе сумматора 8. Оценка экстраполяции, подаваемая на вход умножителя 5 и сумматора 3 в соответствии с уравнением (3), формщ)уется на выходе сумматора 12, на первый вход которого подается вспомогательный процесс U с выхода блока 10 через умнолмтель,11, а на второй вход - выход сумматора 15 через умножитель 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пространственный фильтр | 1987 |
|
SU1543541A1 |
| Адаптивный цифровой фильтр | 1986 |
|
SU1388896A1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ АЛГОРИТМА СИГМА-ТОЧЕЧНОГО ФИЛЬТРА КАЛМАНА | 2024 |
|
RU2840100C1 |
| АДАПТИВНЫЙ ОБРАЩАЮЩИЙ ФИЛЬТР | 1994 |
|
RU2086999C1 |
| Адаптивный цифровой фильтр | 1986 |
|
SU1387173A1 |
| Устройство для автоматического регулирования толщины полосы на прокатном стане | 1990 |
|
SU1729643A1 |
| Устройство для цифровой фильтрации | 1981 |
|
SU957416A1 |
| Адаптивный цифровой фильтр | 1987 |
|
SU1453593A2 |
| Адаптивный фильтр | 1983 |
|
SU1116537A1 |
| Цифровой корректор частотной характеристики корреляционного приемника | 1989 |
|
SU1707768A1 |
ДИСКРЕТНЫЙ ФИЛЬТР, содержащий первый сумматор,выход которого подключен к входу первого умножителя, выход которого подключен к первому входу второго сумматора, выход которого подключен к входу первого блока элементов задержки, выход которого является информационньм выходом фильтра, второй умножитель, второй вход второго сумматора соединен с входом третьего умножителя, выход которого подключен к первому входу первого сумматора, второй вход которого является информационньм входом фильтра, отличающийся тем, что, с целью увеличения точности, в него введены четвертый, пятый и шестой умножители, линия задержки, третий, четвертый и пятый сумматоры, группа умножителей, второй блок элементов задержки, выход первого сумматора подключен к входу четвертого умножителя и входу линии задержки, -й (,N) вькод которой подключен к входу i-ro умножителя группы, выход которого подключен к i-му входу третьего сумматора, выход которого подключен к входу второго умножителя, выход которого подключен к первому входу четвертого сумматора, втброй вход которого подключен к выходу пятого умножителя, вход которого соединен с первым входом пятого сумматора (Л и подключен к виходу второго блока элементов задержки, вход которого под ключен к выходу шестого з множителя, вход которого подключен к выходу пятого сумматора, второй вход которого подключен к выходу четвертого умножителя, выход четвертого сумматора подел ключен к входу третьего умножителя, S х а выход первого блока элементов задержки - к (М+1)-му входу третьего сумматора. сх
| Two-Dimensional Digital Filtering S Ervar Analiysis Ming-Duenn, ZK Aggarwal, IEEE, 1974, vol | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Венгеров A.A., Шаренский В.A | |||
| Прикладные вопросы оптимальной линейной фильтрации | |||
| М., Энергоиздат, 1982 | |||
