i
J
VJ
О
VJ
vj
Os
00
Изобрегениэ относится к технике корре- ллцио -. призма и может быть использовано при построении устройств прецизионной косреляи онной обработки с малыми частотными искажениями.
Цель изобретения - пооышение точно- г.ги .ции путем минимизациисредне- кзаАРэтим но г о уроьня искажений свернутого си. напэ го отношению к расчетной форме пзглмной корреляционной функции
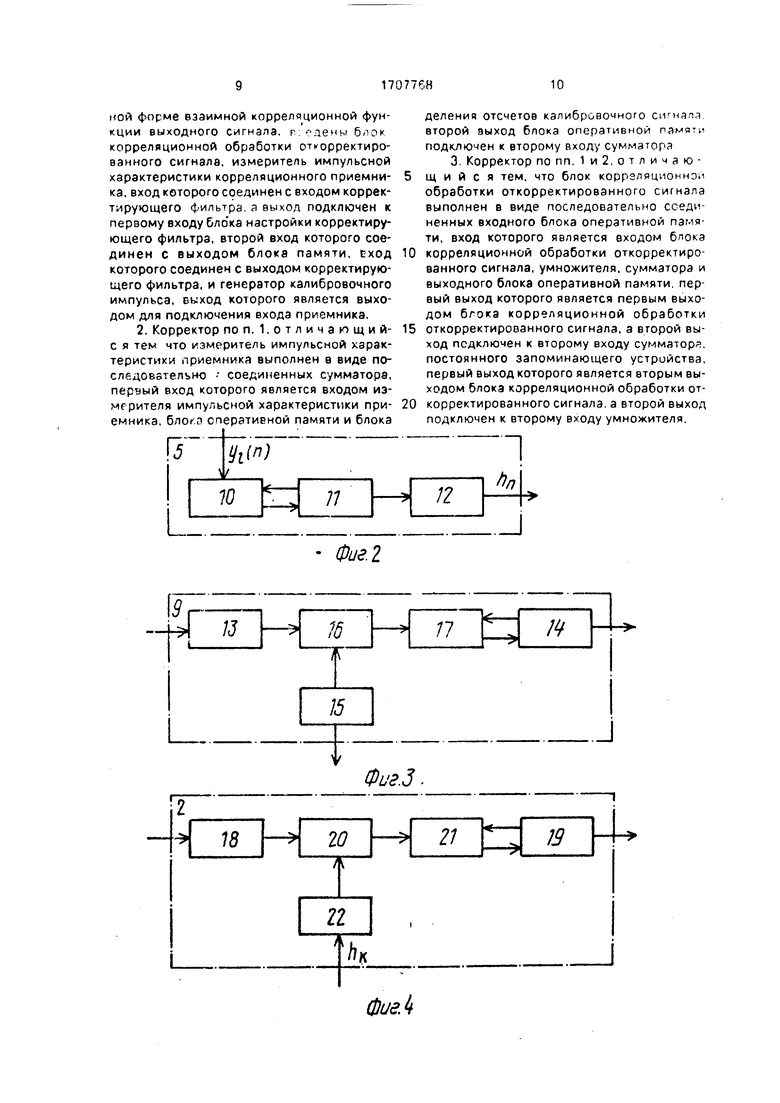
На фиг. 1 представлена структурная электрическая схема корректора частотной характооистики приемчика; на фиг, 2 - пример .пнент - змерител; , импульсной хс-рэ .орпст;м .и лр .-.емникч; на фиг. 3 - пример ьыпо жемия блока корреляционной обработки отче премированного сигнала; на фиг. 4 - пример выполнения корректирующего -фильтра: на фиг. 5 - пример выполнения блока нгстрсйки корректирующего фильтра.
Цифровой корректор 1 частотной характеристики корреляционного приемника содержит корректирующий фильтр 2, генератор 2 кгги5рОЕОиного сигнала,блок 4 настое.. корректирующего фильтра, иэ- -.ер IT ль 5 г.млугьсной характеристики г.орг ..oi.но; с г.измнича, блок 5 ПЗМР- ти, елок 7 г ..ррзл Lu- OHH : ч обработки от- V .. .оектиоо о - ..то С.1ГН :ia.
Npo - t: , .-ч ; ,т Kopper-i,- руемый -.pvz-MrHk С с цифровым выходом, СчОл -Г 1И C jOCTDSHHO риемник 9 и ксм ;гтор pc.fv-.N a ка.иЗровки (HG показан). I .. гитель Е х. чктери т.-хи приемника (ф1:г. 2j и . ато:. VO. ггск опе- рат Р - сй niiM -ти (сСГ). реа/1иэоезннь й зк среоатиьмс .дее устройство ;03V;. piroK 2 деления.
Г; ,.к 7 корр.г дипн - о;/ обработки (фиг. Z, содержит ьхо„юй БОН .3, выходной БОП 11. погтоячнс-5 сэпоминлюшее устройство (ПЗУ) 15, умнохитель 1В. сумматор 17.
Корректирующий фильтр 2 (фиг. 4) содержит входной ЕОП 18, выходной БОП 19, ,множитеяь 2С, сумматор 21. БОП 22.
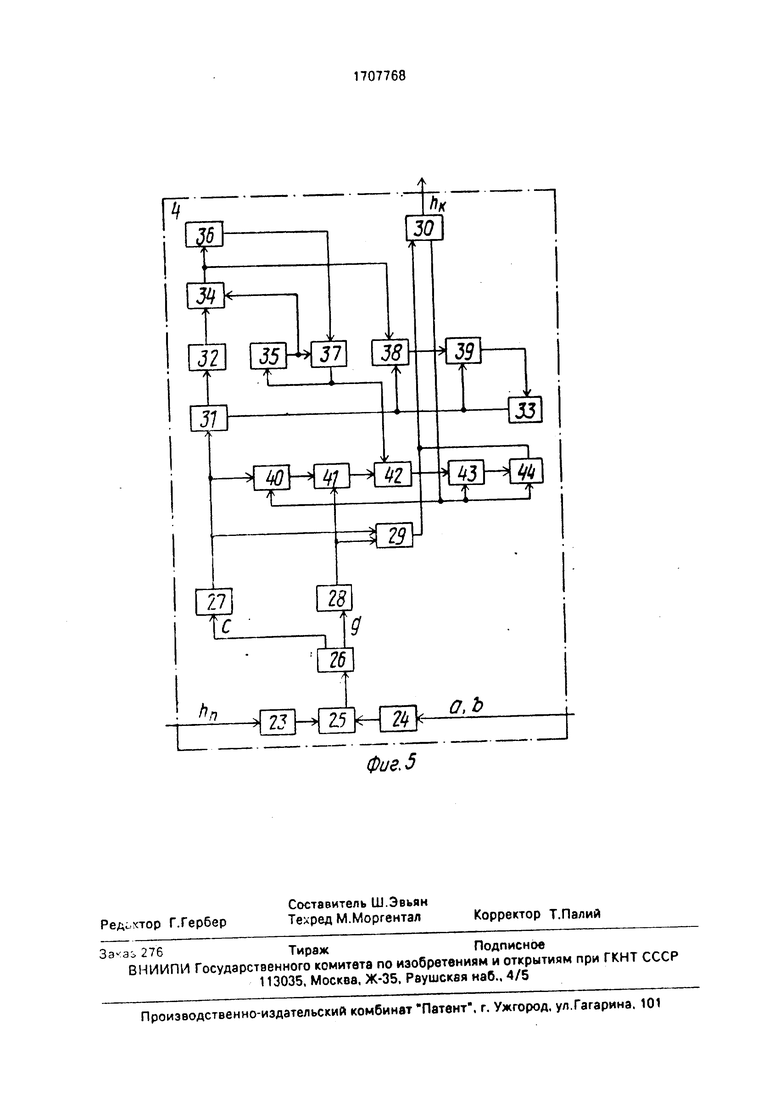
Блок 4 адаптивней настройки (фиг. 5)
-одерж-:т БОП 23, БОП 24, у:/нолитель 25, сумматор 26.БСП 27, БОП 28, делитель 29, БСП 30, умножитель 31. с ммлтор 32, БОП 33, умножитель 34, БОЛ 35, квадратор 35, Је.рчтель 37, умножитель 33, сумматор 39, умно.житель 40, сумматор 41, умножитель 42. умножитель 43, сумматор 44,
У тройство работает следующим образом.
Пассивная помеха представляет собой суперпозицию отдельных составляющих, повторяющих закон модуляции используемого сигнала S(t) с расстройкой по частоте и
задержке. Учитывая, что в подавляющем большинстве случаев расстройка частоты помехи крайне мала по сравнению с величиной, обратной длительности сигнала rs она
может считаться нулевой. Поэтому мощность помехи на выходе корреляционного приемника определяется формой взаимной корреляционной функции (ВКФ) используемого сигнала и фильтра корреляционной обработки, имеющего частоту настройки Ф, которая соответствует ожидаемой частоте полезного сигнала. Наличие в приемнике 8 с цифровым выходом полосового фильтра, ограничивающего ширину спектра входных
сигналов переддискретизацией ло времени и дискретной обработки с шагом в блоке 7 корреляционной обработки приводит к искажениям реальной ВКФ г(г) по отношению к расчетной форме г(г), которые проявляются, в конечном счете, в увеличении уровня помех. В случае, если фильтр дискретной корреляционной обработки WT(I) получен дискретизацией фильтра W(t), а сигнал перед корреляционной обработкой пропущен
через фильтр с частотной характеристикой H(f), которая удовлетворяет условиям теоремы Котельникова для дискретизации по времени с и;згзм Т, то искажения ВКФ состоят из двух компонент
-, rv rb Д,ГТЬ д./Т)
-JU
Л(К)-(,й()е)ф ;2;ггШ
-,
-%K);J4w(f)-i) f
;opi;f Sif)WTff.O),)(yr)
(О
1
где fi трр ;
,, ,r W (f + Ф НорНЪ
(i ф оптимальна, фи31 чс:ки не реализуемая фильтром с конечной импульсной характеристикой: частотная характеристика фильтра (черта
сверху означает комплексное сопряжение). Цифровой корректор 1 расчетной характеристики предназначен для приближения сквозной частотной характеристики корреляционного приемника 8 к оптимальной и,
следовательно, уменьшения уровня второй компоненты, мощность которой составляет
55
«t-j UiWllorT f|HW-H.pt(f))wt(f.
-/Ч
(«
Учитывая ортогональность обеих компонент друг к другу - зто следует из отсутстаия пересечений облзстей их интегрирования по частоте в формуле(1) получаем, что уменьшение второй компоненты приводит к уменьшению искажений ВКФ а целом. Представляя H(f) e виде произведения частотных характеристик полосового фильтра приемника 8 с цифровым выходом и коррек- тиру,ощего фильтра 2, импульсные характеристики которых соответственно hn(n)n - 1...Nn и /1к(п)п I...NH. можно преобразовать вырэжение (2) к виду
гц- h,Cn, - g) + р , (3) гд-j - символ эрмитова сопряжения, р- некоторый скаляр.
Компоненты теплицевой матрицы С г- вектора т имеют вид
С(.71,п: - F-EhnMWVlafi + V-m-LO,
), (MS t
t r(4)
гр.г коэффициенты а и b зависят 7олько от параметров корреляционной обработки и могут fvTt вычислены заранее для всех гзр сигнал - фильтр, с которыми может работать . ррсл.пцизнный приемник
-г
,5 . IW, -Т; -: Ic Т id,
f i w, .. :7 Т,- -- 1 - aш
Вектор корректирующего 2 . входящего в состав цифрового корректора частотней характеристики, доставляющий миь мум зыгйжэния (3; является решением истемь/ линейных уравнений
Ch«-g.(О Весь цикл работа блок 1 корреляционной обработки сигнала состоит из реж/мз калибровки и рабочего ре.има. Включение режима калибровки осуществляется автоматически в следующих случаях: для дополнительного улучшения скзозной частотной характеристики; при смепе несущей частоты - ввиду переключения фильтра преселек- тора и изменения его частотной характеристики; при смене параметров кор- ре.чйционмей обработки - ввиду изменения оптимальней частотной характеристики; принудительно с некоторь м темлом, олре- делягмим экспериментальчо - для компенсации дрейфа частотных характеристик аналоговых узлов или при их замене в ре- эультзгс неисправности.
Во время режима калибровки блок. 7 корреляционной обработки не работает Сначала коммутатором (не показан) корректируемый приемник отключается от антемны и принимает от генератора 3 калибровочный сигнал в виде пачки L коротких импульсов со спектром, который в де сять и более раз перекрывает интервал частот в полосе пропускания приемника О
В качестве таких импульсов могут использоваться, например, радиосигналы с амплитудой модуляцией или без нее, на несуще :, равной частоте настройки приемника 9 и с произведением их длительности на полосу
пропускания приемникам, равным 0,1 и ме- нео. Чтобы отклики приемника 9 на каждый импульс не накладывались друг на друо период следования импучьсов в пачке дел жен превышать длительность импульсной
характеристики приемника 9, которая оценивается заранее перед сдачей приемника 9 в эксплуатацию. Тогда же путем оценки уровня собственных шумов приемника 9 экспериментально подбирается количество
импульсов в пачке так. чтобы отношение сигнал/шум при последующем когерентном накоплении в измерителе 5 импульсной характеристики приемника составляло q 60 дБ и более. На выходе приемника 9 образуечся когерентная последовательность сигналов, пропорциональных Эквивалентной импульсной характеристике всех узлов приемника hn(n) с дискретом времени Т Измеритель 5 характеристики приемника произзсдит выделение характеристики hr,(n) на фоне собственных шумоп приемника У у- тем когерентного накопление
г.п (п)
t,i.Yi(n)
f7i
где Yi(n) - отклик приемника на I - и импульс. Измеренный вектор hP выдается в блок
4 нэстройки корректирующего фильтра 2, на второй вход которого из блока 6 памяти подаются параметры оптимизации а и Ь. вызываемые, в свою очередь, командами блока 7 корреляционной обработки в соответствии
с текущим ; параметрами корреляционной обработки В блоке 4 сначала вычисляются компоненты вектора g и первого столбца матрицы С по формулам (4), а затем решается система уравнения (6). Рассчитанный векTOD г;к выдается в корректирующий фильтр 2. ha этом режим калибровки заканчивается.
В рабочем режиме блоки 3-6 не рэбота- Ю. Сигналы с выхода антенны, проходя через гриемник 9 и корректирующий фильтр 2
с установленными в ходе капибровки коэффициентами, поступают в блгк 7 корреляционной обработки откорректированного сигнала.
Измеритель 5 импульсной характеристики приемника 9 работает следующим образом. Внрчале БОП 11 обнуляется. На первый вход сумматора 10 поступают отсчеты отклика приемника Y;(n) для текущего импульса калибровочного сигнала, но второй вход из БОП 11 - накопленные для предыду- щего импульса отсчеты, результаты накопления каждого отсчета записываются е ОЗУ 11 по тем же адресам. После окончания калибровочного сигнала посредством блока 12 деления осуществляется нормировка накопленного отклика на количество импульсоп L.
Ь. Юк 7 корреляционной обработки откорректированного сигнала работает следующим образом. Информация от корректирующего фиг.ьтрз 2 поступает РО входной БОП 13, откуда поочередно считывается е умножите,-1- If Ma второй вход умножителя 15 из ПЗУ 15 поступают коэффициенты текущего фильтра короеля- ционно обработки, а номер текущей пэры сиг;-.;1 - фильтр выдается в ка-естве адреса о-з ни с -. J ПЗУ 15 в блох 6 памяти. Посредством сумма:орэ 17 осуществляется су.ми- .:-ие ь.с,.ной . нАгоадзции с гег.зми, лаемыми коз.ф: ,.,и-: иэм: 4 илы р корреляционной сбр«5 : гк:;-.. О Гг.зл1..; с вы- .дэ сумматора 17 гт, ;исываютс. в Г.ЫАОД- нгй 5СП 14.
i- Орректи;.. /ц- .„ И С ГР 2 f:Ј ;JOTSev
следуй. u .Hfv- опрьгом
Бь -- и: 1гннь.1. Р .-с,-,-э ..-, сро°г.. гектор h гч туп--с- в БОП Г . --г-г- ся там до нзча.. след-ю-цего i-. .-ЛР кг ибрсзги Ин- форма-.|.ич от 9 во
. Й ЬОП , ОТ Јri 10СДНО СчИТЬиа:псч в ум.нсжи 20. ь сучч.отор. ссущсст г Яется суммиссван/.ь входной ин- Формиации с весами, определяемыми коэффициентами корректирующего фильтра Ьк(п), поступаюсцими гз 50П 22 н.-i второй вход умнож.пелч 20, а результат записывается ь ьиходчой БОН i9.
Блок 4 настройки корректирующего Фильтра 2 работает следующим образом.
БОП 2 заносятся компоненты изме- ptr мого вектора из .змерителя 5 импульсной характеристики приемника, а в БОП 24 -- пз- рам- ipbJ оптимизации а и Ь з блока б памяти. И ос ре дет зс - у мно.теля 25 и сумматора 25 осущестзг.яется расчет первого столбца матрица С и велюра g г.оформу- лз (4). Результаты записываются в БОП 27 и 28.
Блоки 29-44 обеспечивают решение системы уравнений (6). Сначала БОП 23 обнуляется, первые элементы столбца матрицы С и вектора g поступают на вход делителя 29. а частное заносится в БОП 30 в качестве начального значения. Затем циклично (N 1) раз (Nx - порядок системы уравнений, равный порядку корректирующего фильтра
2) повторяются следующие операции, С помощью умножителя 31 и сумматора 32 вычисляется величина F. Вектор х 1, полученный ь предыдущем цикле, поступает в умножитель 31 из БОП 33. В умножителе 34 вычисляется величина S. Величина Р - i,
полученная в предыдущем цикле, поступает в умножитель 34 из ОЗУ 35. Квадратор 36 вычисляет величину 5к2 и выдает ее в делитель 37, вычисляющий величину Рк, которая записывается е СЗУ 35 взамен величины Рк 1
Величина S поступает из умножителя 34 в умножитель 38. ьз второй вход которого из БОП 33 выдается ьактср X . полученный в предыдущем цикг.е, После суммирования в Олоке ЗЭ вектор X записывается в ОЗУ 33
гзамен X 1 Умножитель 40 совместно с сумматором 41 вычисляет величину Јк. На второй вход сумматора 41 из БОП 28 подают.) xi/.-vnohSHTbi вектора правой части си- стсмы у г) Е. оний . В , м ножи е л е 42
рыии;л стся bc/in-i .tia ft, которая далее ис- ,. .зует :(; ь у:-можите/.г; 43. Сум.-, этор 44 вьг . спргт ,;..:.-с Г сс-шгниь системы ...;я те-V- . - -,., ; /- точ ре -:-н.я на предыду,,пм цикле. ..:. ; -щегсся з БЗП 30 и
гс j.:ero г сторые вхгдь блоксп 40,
- и ЛА. на пес.; еднем цикле ре.м)Јние системы из БС1 Зи выдастся в блек корректи- rwc L4sro фи нтоа 2.
Егск 5 г огдстзплр т собой ПЗУ с нгг --ором оэссчитз- н&х по формуле (5 ксЭ ИЦИЙНТС 5. СПТИМИ -.аЦ . 1 3 И Ь. Номер ИС
Г: л:суемой С| оос- - ционном приемнике г. гч сигнал - .. ль с, пс.с утающий из бло- .а 7 у.ороеляц-поннс й обработки, является
адресом чтения для этих коэффициентов. о р м / ,. э изобретения 1 Цифровой корректор частотней характеристики корреляционного преемника, содержащий корректирующий фильтр,
которого является входом длв подключения оыхсд.э nrr. L-f- H .iK3. блок настройки корректи- рующегс фильтра, выход которого подключен к управляющему входу корректирующего фильтра, б . к памяти, отличающийся
тем, что, с целью повышения точности коррекции частотной характеристики корреляционного приемника путем минимизации среднеквадратичного уровня искажений сеерн/юго сигнала по отношению к расчетной форме взаимной корреляционной функции выходного сигнала, п. едены блок корреляционной обработки откорректированного сигнала, измеритель импульсной характеристики корреляционного приемни- ка. вход которого соединен с входом корректирующего фильтра, а выход подключен к первому входу бло ка настройки корректирующего фильтра, второй вход которого соединен с выходом блока памяти, сход которого соединен с выходом корректирующего фильтра, и генератор калибровочного импульса, выход которого является выходом для подключения входа приемника.
2. Корректор по п. 1,отличающий- с я тем что измеритель импульсной характеристики приемника выполнен в виде последовательно ; соединенных сумматора, первый вход которого является входом измерителя импульсной характеристики при- емника, блока оперативной памяти и блока
деления отсчетов калибровочного сигнала. второй выход блока оперативной памяти подключен к второму входу сумматора
3. Корректор по пп. 1и 2, отличающий с я тем, что блок корреляционной обработки откорректированного сигнала выполнен в виде последовательно соединенных входного блока оперативной памяти, вход которого является входом блока корреляционной обработки откорректированного сигнала, умножителя, сумматора и выходного блока оперативной памяти, первый выход которого является первым выходом блока корреляционной обработки откорректированного сигнала, а второй выход подключен к второму входу сумматора, постоянного запоминающего устройства, первый выход которого является вторым выходом блока корреляционной обработки откорректированного сигнала, а второй выход подключен к второму входу умножителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный корректор межсимвольной интерференции | 1987 |
|
SU1540009A1 |
| Адаптивный корректор канала связи | 1983 |
|
SU1166318A1 |
| Интерферометрическая система приема и цифровой обработки сигналов | 1983 |
|
SU1141434A1 |
| Приемник сигналов с парциальным откликом | 1983 |
|
SU1117854A1 |
| ПРИЕМНОЕ УСТРОЙСТВО ШИРОКОПОЛОСНЫХ СИГНАЛОВ | 2013 |
|
RU2548660C2 |
| Система передачи данных | 1986 |
|
SU1462507A1 |
| СИСТЕМА ПЕРЕДАЧИ ДАННЫХ | 1991 |
|
RU2019049C1 |
| Система передачи данных | 1989 |
|
SU1728976A2 |
| ДУПЛЕКСНЫЙ МОДЕМ | 1998 |
|
RU2147791C1 |
| Устройство адаптивного приема дискретных сигналов | 1982 |
|
SU1113891A1 |
Изобретение относится к технике корреляционного приема и может быть исполь- зовано при построении устройств прецизионной корреляционной обработки с малыми частотными искажениями.Цель изобретения - повышение точности коррекции путем минимизации среднеквадратичного уровня искажений свернутого сигнала пс отношению к расчетной форме взаимной корреляционной функции. Цифровой корpe qop 1 частотной характеристики корреляционного приемника содержит корректирующий фильтр 2, генератор 3 калибровочного сигнала, блок 4 настройки корректирующего фильтра, измеритель 5 импульсной характеристики корреляционного приемника, блок 6 памя и, блок 7 корреляционной обработки откорректированного сигнала. Поставленная цель достигается путем введения в устройство измерителя 5 импульсной характеристики корректируемого корреляционного приемника, генератора калибровочного сигнала блока 7 корреляционной обработки откорректированного сигнала и соответствующих связей, за счет чего осуществляется минимизация среднеквадратичного уровня искажений взаимной коореляционной функции по отношению к расчетной форме. 2 з.п. ф-лы, 5 ил. fe
Фиг.З
фиг А
| Электрический выключатель | 1928 |
|
SU10833A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
