1
Изобретение относится к электротехнике, а именно к автоматизированным электроприводам с тиристорными преобразователями частоты и может быть использовано в многоконтурных системах, использующих интегрирующие регуляторы, а также в частотно-регулируемых электроприводах в установках металлургической, бумагоделательной промыщленности, в механизмах подач копировальных станков и станков с программным управлением.
Известно устройство 1, содержащее задатчик интенсивности, выход которого подключен ко входу регулятора скорости (и регулятора напряжения в частотно-регулируемых асинхронных электроприводах), который через ряд промежуточных регуляторов (в зависимости от типа привода) воздействует на тиристорный преобразователь того или иного типа. Использование задатчика темпа позволяет в системах с быстродействующими преобразователями снизить перерегулирование и без применения задержанных связей ограничить динамические нагрузки преобразователя и двигателя в процессах пуска, торможения и регулирования скорости. Кроме того, в частотно-регулируемых приводах задатчик интенсивности предотвращает опрокидывание (переход на жесткий частотный пуск) асинхронных двигателей.
Однако применение задатчика с заранее устанавливаемым темпом снижает быстродействие привода, так как даже, когда момент сопротивления и ток постоянны, приходится устанавливать темп ниже предельно допустимого, поскольку постоянство моментов принимается с известным приближе.JJ нием. В реальных же системах всегда существует момент трогания, изменение моментов механических и вентиляционных потерь, не говоря уже о случайных воздействиях. Поэтому задатчик темпа формирует достаточно сложную функцию изменения частоты
15 во времени.
Чаще всего зависимость момента от скорости, частоты скольжения не поддается строгой аппроксимации, а если это удается сделать необходим запас по моменту, так как всех возможных изменений моментов в
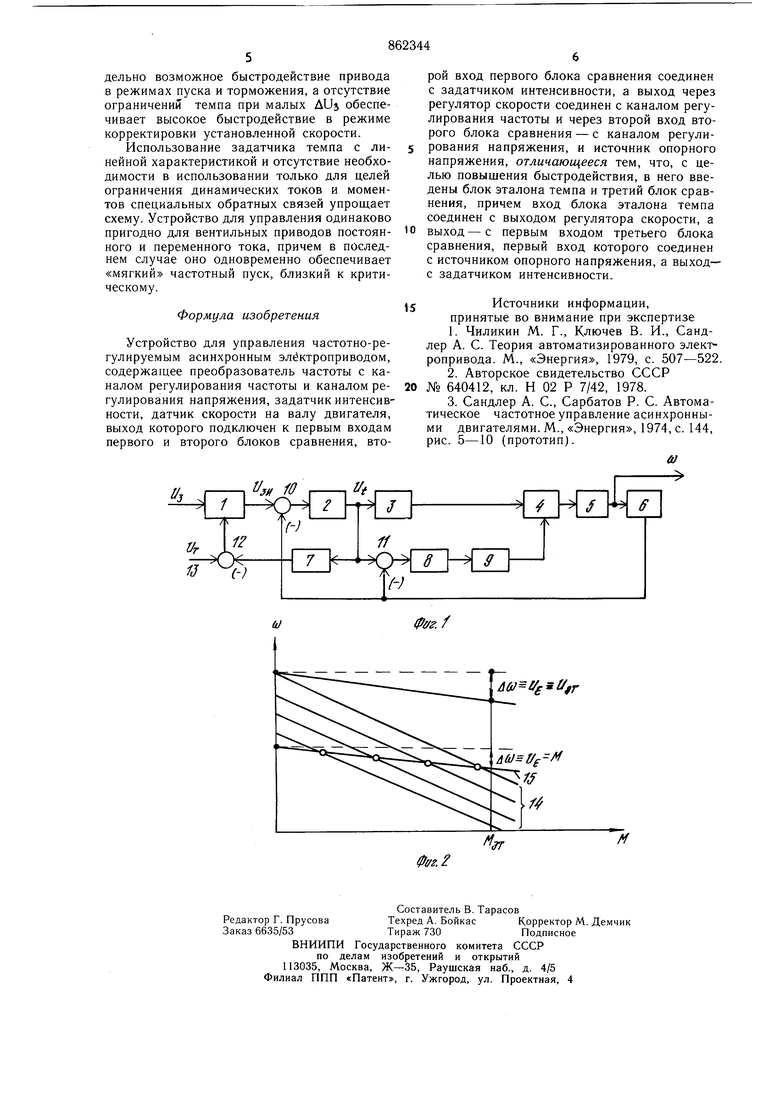
20 реальных системах в процессе пуска учесть невозможно. Перевод задатчика интенсивности в режим автоматического регулятора темпа разгона частотно-регулируемого электропривода в функции тока 2 позволяет исключить опрокидывание асинхронного двигателя, но приводит к еще большему снижению быстродействия, так как за счет снижения темпа уменьшается форсировка в канале регулирования амплитуды. Наиболее близким к изобретению техническим решением является устройство для частотного управления асинхронным двигателем 3, содержаш,ее преобразователь частоты с каналом регулирования частоты и каналом регулирования напряжения, задатчик интенсивности, датчик скорости на валу двигателя, выход которого подсоединен к первым входам первого и второго блоков сравнения, второй вход первого блока сравнения соединен с задатчиком интенсивности, а выход через регулятор скорости соединен с каналом регулирования частоты и через второй вход второго блока сравнения - с каналом регулирования напряжения, и источник опорного напряжения. В данном приводе задатчик интенсивности также должен быть настроен с учетом возможных изменений момента нагрузки, т.е. задавать темп ниже, предельно допустимого, что, как указывалось, снижает быстродействие. Цель изобретения - повышение быстродействия. Поставленная цель достигается тем, что введен блок эталона темпа и третий блок сравнения, при этом вход блока эталона темпа соединен с выходом регулятора скорости, а выход - с первым входом третьего блока сравнения, первый вход которого соединен с источником опорного напряжения, а выходс задатчиком интенсивности. На фиг. 1 приведена функциональная схе ма частотно-регулируемого привода; на фиг. 2 показаны механические характеристики приводов с обратными связями. Привод состоит из задатчика 1 интенсивности, регулятора 2 скорости, канала 3 регулирования частоты, преобразователя 4, двигателя 5 с датчиком 6 скорости, блока 7 эталона темпа, регулятора 8 напряжения в канале 9 регулирования напряжения, первого 10, второго 11 и третьего 12 блоков сравнения, источника 13 опорного напряжения. Устройство работает следующим образом. С помощью опорного напряжения 0 устанавливается темп изменения задаюшего напряжения LJj., заведомо больший предельно допустимого. Тогда при подаче на вход задатчика 1 интенсивности скачка напряжения задания AUs система,благодаря наличию контуров обратных связей и регуляторов, форсированно переходит в точку с эталонной ошибкой по скорости , соответствующую моменту Mjnt. (см. фиг. 2). При этом открывается блок 7 эталона темпа, который в простейшем случае может представлять собой стабилитрон с напряжением изй, и начинает работать отрицательная обратная связь по ошибке воспроизведения скорости Ug, (см. фиг. 1), снижая темп изменения сигнала до допустимого уровня. Если сигнал задания в процессе работы меняется на небольшую величину, приводящую к ошибке Ug , то происходит форсированное изменение скорости без ограничения темпа. При использовании такого устройства в системах частотного регулирования, посколь ку контур регулирования темпа и контур регулирования потока (см. фиг. 1) непосредственно не связаны друг с другом, за счет контура и регулятора 8 напряжения обеспечивается форсированное нарастание потока и затем его стабилизация, причем это непосредственно не влияет на снижение темпа и уменьшение форсировки в контуре регулирования потока. Контур регулирования потока может строиться также с применением датчиком ЭДС, потока, либо падения напряжения в статорных цепях. Поскольку время разгона t р до установившейся скорости WUCA. определяется как CJytm А- а. момент двигателя можно выразить как М KnttUg., где Кок - коэффициент передачи звеньев прямого канала (см. фиг. 1), то . Так как задатчик интенсивности в устройстве стабилизирует U на уровне, соответствующем предельно допустимой Ашавл. (см. фиг. 2), то это соответствует предельно допустимому моменту двигателя, а следовательно, и предельно допустимому избыточному моменту, при любом законе изменения момента сопротивления Мс- и момента инерции J. Поэтому в такой системе задатчик интенсивности выполняет функции регулятора минимального времени разгона. В частотно-регулируемых электроприводах контур стабилизации потока приводит механические характеристики привода в зоне рабочих моментов к характеристикам типа 14, соответствующим приводам постоянного тока без обратных связей (см. фиг. 2). А тогда контур регулирования частоты (скорости) совместно с задатчиком регулируемой интенсивности решает те же задачи, что и в приводах постоянного тока, формирует жесткие механические характеристики типа 15 (см. фиг. 2) и обеспечивает предельное быстродействие. Таким образом, поддержание предельного избыточного м-омента обеспечивает предельно возможное быстродействие привода в режимах пуска и торможения, а отсутствие ограничений темпа при малых AUj обеспечивает высокое быстродействие в режиме корректировки установленной скорости.
Использование задатчика темпа с линейной характеристикой и отсутствие необходимости в использовании только для целей ограничения динамических токов и моментов специальных обратных связей упрощает схему. Устройство для управления одинаково пригодно для вентильных приводов постоянного и переменного тока, причем в последнем случае оно одновременно обеспечивает «мягкий частотный пуск, близкий к критическому.
Формула изобретения
Устройство для управления частотно-регулируемым асинхронным электроприводом, содержащее преобразователь частоты с каналом регулирования частоты и каналом регулирования напряжения, задатчик интенсивности, датчик скорости на валу двигателя, выход которого подключен к первым входам первого и второго блоков сравнения, второй вход первого блока сравнения соединен с задатчиком интенсивности, а выход через регулятор скорости соединен с каналом регулирования частоты и через второй вход второго блока сравнения - с каналом регулирования напряжения, и источник опорного напряжения, отличающееся тем, что, с целью повышения быстродействия, в него введены блок эталона темпа и третий блок сравнения, причем вход блока эталона темпа соединен с выходом регулятора скорости, а
выход-с первым входом третьего блока сравнения, первый вход которого соединен с источником опорного напряжения, а выход- с задатчиком интенсивности.
Источники информации,
принятые во внимание при экспертизе
1.Чиликин М. Г., Ключев В. И., Сандлер А. С. Теория автоматизированного электропривода. М., «Энергия, 1979, с. 507-522.
2.Авторское свидетельство СССР № 640412, кл. Н 02 Р 7/42, 1978.
3.Сандлер А. С., Сарбатов Р. С. Автоматическое частотное управление асинхронными двигателями. М., «Энергия, 1974, с. 144, рис. 5-10 (прототип).
V
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотно-регулируемый электропривод с экскаваторной характеристикой | 1979 |
|
SU904176A2 |
| Частотно-регулируемый электропривод | 1978 |
|
SU744886A1 |
| Устройство для управления торможением частотно-регулируемого электропривода | 1984 |
|
SU1236593A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Устройство для автоматического управления асинхронным двигателем в режиме частотного торможения | 1988 |
|
SU1552322A1 |
| Электропривод | 1991 |
|
SU1837379A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Устройство для управления частотно-регулируемым электроприводом | 1988 |
|
SU1601728A1 |
