В ОСНОВНОМ авт. ез. .Y 106938 описан способ гибки труб ма трубогибочном станке с нажимным роликом, двигающимся в направлении, перпендикулярном )ав.лению подачи трубы, с r pи eI CHИcм нагрева ТВЧ п охлаждением участков, прилегаюН1их к зоне ;агрева.
В предлагаемом устройстве усовершенствовЕН указанный способ. В нем прил енена Н тан1а, шаркирно связанная одним концом с концом изгибаемо трубы, а другим концом со стрелкой индикатора, индуктивно;Ч1 датч-:1ка и т. н.. нозоротпого вокруг оси, -расноложсннон в плоскости иидуктора ТРЗЧ в дептре вращения изогнутой часта трубы.
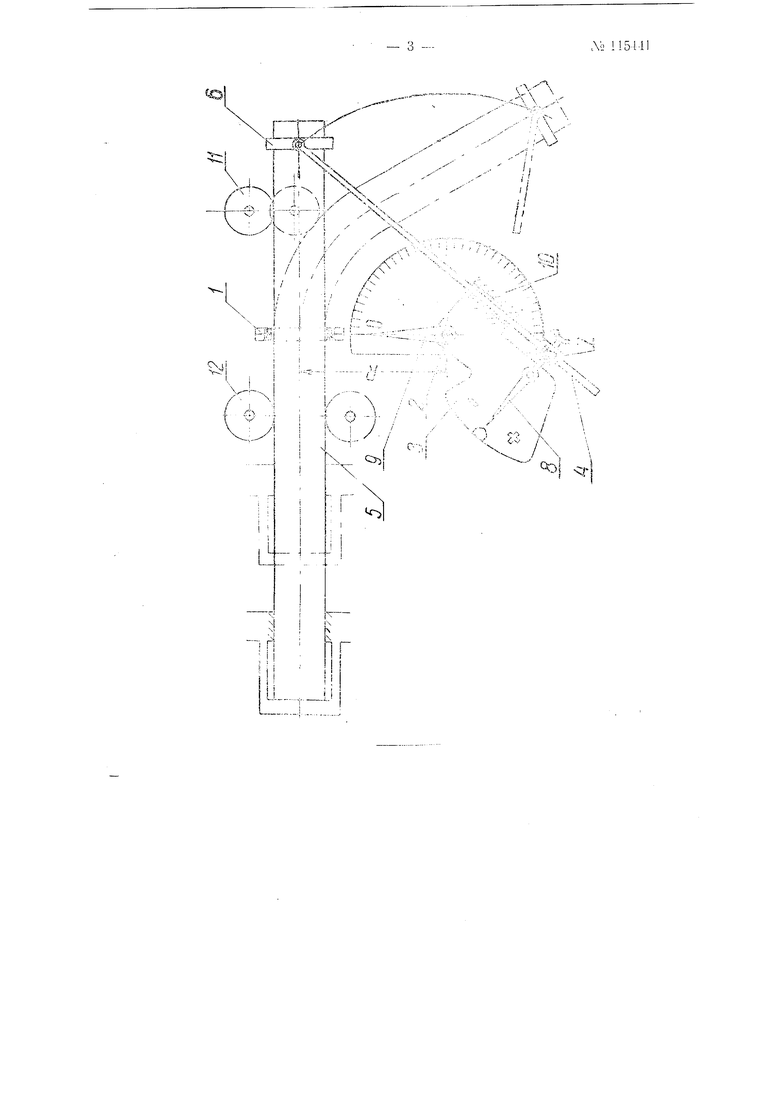
На чертеже схем атически показано н;)eдлaiac oc устройство.
В плоскости индуктора / на расстоянин, равном заданному мертеЛхом изделия радиусу гпбки ), устанавливают валлк 2 устройства, кото 1ы,й может поворачиваться в поднилнике (подшипник на чертеже не изображен). С паликом 2 связано плато 3, во втулке которого может
свободно перемещаться штанга 4. Конец ее крепСГгся к прямому концу Tpy6b.j 5 втсреди зонт изгиба в любг;м .месте npii помопли хомутиюа б . Ма штанге 4 может б1)1ть закоеплена втулка 7. име;О1цая па.тец, при по.люии которого штанга 4 связывается со стрс.тко 8. На залике 2 крепится стрелка 9, указывающая угол загиба трубы по шкале, нанесенной на тпанспОГгиое 10. Yloc:i& того как ва,т;ть: 2 установ.лен з необходимом месте на расстоянии R от середины трубы, а коней, штанги 4 закреплен при ИОМОП1И хомутика 6 на свобод1Ц1М конце трубы 5. стрелки 8 и 9 .я в .Сходные положения. Затем включают трубогибочный
осн. п;м)ходит через зону нагрев а, сэзлйваелпло и};дyктopo ; /. и в каждом последовательно получает погиб на элементарный угол. Прп этом все точки трубы, расположе;Н мС впереди индуктора /, должнь но окружностей,
концентричных валику 2. Если радиус гибки уменьшается, то штанга 4 передвигается относительно плата 3 так, что стрелка 8 отклоняется в сторону, обозначенную анаком минус. При увеличении радиуса r:-i6iiH стрелка 8 отклоняется в сторону энака плюс.
Штанга 4, новорач.иваясь вместе со свободным -концом трзбы, ведет с собой .плато 5 и скрепленный с ннм валлк 2. Угол цоворота валика 2 может быть .измерен по .показ1аниям стрелки 9 на шкале тр.анспортира 10. Так как угол поворота штанги 4 раВен углу загиба , то стрелка 9 показывает на какой угол погнута труба.
Таким образам рабочий-гибшик имеет .воаможНостъ по показ:аниям стрелки 8 корр1ектировать положение нажИМного ролика , добиваясь получения гиба с заданным радиусом, а по показаниям стрелки 9 следить Sia углом загиба трубы и своевременно выключить станок, нри достижении чертежного размера.
Перемеш;ение штанги 4 относительно валика 2 или плато 3 .могут фиксироваться не только МеханичеciH.M индикатором в стрелки 8, но и конечньши выключателями, аспо,чоженны:.ми на плате 3, или индуктивным датчиком. Цифрой 12 обозначены .направляющие ролики.
П 5 е д м е т изобретен .и я
Устройство для управления процессом изгкбааия трубы на трубогибочном станке, согласно способу по авт. св. Л1 106938, отличаюni.ee-с я применениел штанги, шарнирно связ анной одним концом со свободные концом изгибаем.ой трубы и .вторым канцо.м со, стрелкой индикатора, индуктивного датчика и т. п., поворотного вокруг оси, расположенной в плоскости инд5п тора ТВЧ Б центре врап1ения изогнутой части трубы.
ГТТЛ
Тч Ч
14
/%х /
, i i
,/ N .
-A
| название | год | авторы | номер документа |
|---|---|---|---|
| Трубогибочный станок | 1956 |
|
SU110447A1 |
| Способ гибки труб на трубогибочном станке | 1956 |
|
SU106938A1 |
| Фотоэлектрический тахометр | 1957 |
|
SU115129A1 |
| Способ гибки труб и устройство для осуществления этого способа | 1957 |
|
SU119774A1 |
| СПОСОБ ГИБКИ ТРУБ | 1968 |
|
SU220012A1 |
| Магнитофон для воспроизведения отдельных слов | 1959 |
|
SU126641A1 |
| Головка гибочная трубогибочного станка | 1978 |
|
SU772648A1 |
| Гибочный орган трубогибочного станка | 1973 |
|
SU463497A1 |
| Трубогибочный станок с индукционным нагревом | 1976 |
|
SU676354A2 |
| Способ гибки труб | 1984 |
|
SU1250349A1 |
;: ;-i
I
1
1 xr
