Изобретение относится к силоиз- мерительной технике и может быть , использовано для силомоментного очувствления роботов различного назначения в машиностроении, металлургии и т.п.
Целью настоящего изобретения является повышение Надежности и уменьшение габаритов.
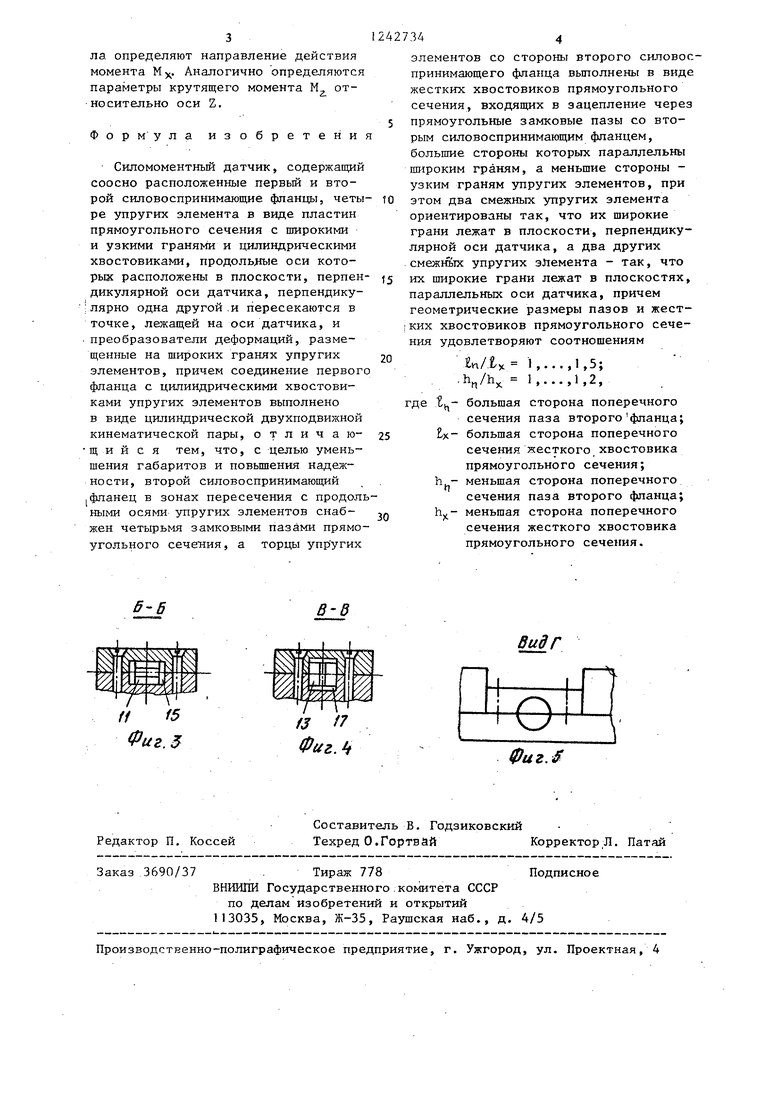
На фиг. 1 изображен силомомент- ный датчик; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 разрез В-В на фиг. 1; на фиг. 5 - вид Г на фиг. 2.
Датчик содержит первьй 1 и второй 2 фланцы, связанные между собой че тырьмя упругими элементами 3-6 в виде удлиненных пластин, и преобразователи 7 деформаций, размещенные на широких гранях упругих элементов 3-6. Продольные оси упругих элементов 3-6 расположены в плоскости, перпендикулярной оси Z датчика, перпендикулярно одна другой и пересекаются в точке, лежащей на оси Z. Соединение фланца 1 с элементами 3-6 выполнено в виде цилиндрической двух подвижной кинематической пары 8 и 9. Элементы 3-6 со сторонь торцов, обращенных к фланцу 2 5 снабжетя. поям- ками 10-13,фиксирующими зацепление с фланцем 2, а посадочные места 14- 17 под пояски 10-13 выполнень с возможностью обеспечения перемещения фланца 2 в плоскостях, образованных широкими гранями элементов 3-6, при этом широкие грани двух смежных упругих элементов 3 и 4 лежат в плоскости, перпендикулярной оси Z датчи ка, а широкие грани двух других смеж ньпс упругих элементов 5 и 6 лежат ортогонально широким граням двух первых элементов 3 и 4, т.е. параллельно оси Z да 171ика.
Пояски 10-13 представляют собой утолщения на торцах упругих элементов 3-6 четырехугольного профиля, ограничивающие перемещение фланца 2 вдоль и вокруг продольных осей элементов 3-6, но допускаюш;ие его пере- мещенне в плоскостях, образованных широкими гранями элементов 3-6, перпендикулярно продольным осям этих элементов. Цилиндрическое сопряже-. ние противоположных торцов упругих элементов 3-6 с фланцем 1, наоборот допускает его смещение вдоль и вок
руг продольных осей упругих элементов 3-6, но ограничивает перемещение фланца 1 в плоскости широких граней элемеи:тов 3-6.
Датчик укрепляют фланцем 2 на место базирования, например к руке робота, а на фланед 1 воздейств тот усилием, например схватом р обота с объектом манипулирования. При дей- ствии силы Р,, направленной по оси Z датчика, деформироваться в одинаковом направлении будут упругие элементы 3 и 4, на преобразователях 7 деформации которых появятся сигналы одного знака с одной стороны упругих Элементов 3, 4 и другого знака - с другой стороны упругих элементов 3 и 4. После суммирования сигналов одного знака -получаем модуль искомой величины F, действующей по оси Z
датчика, а по знаку величины F. определяют направление действия силы F.
При действии силы, направленной по одной из координатных осей,например X , деформироваться будет упругий элемент 5, на преобразователях 7 деформации которого появятся сигна-- лы одного знака на одной стороне, упругого элемента 5 и другого знаКа на противоположной стороне элемента 5. После инверсного суммирования сигналов получаем искомую величину Ту , а по полярности знака сигнала определяют направление действующей силы Fy . А}1алогично определяют па- .раметры силы Fy.
При действии крутящего момента М-, относительно оси датчика деформируются упругие элементы 5 и 6, на преобразователях 7 деформации которых появятся сигналы одного знака с одной стороны упругих элементов 5, 6 и другого знака с противоположной стороны упругих элементов 5 и 6. Посел сЗ(Т Ф1ирования сигналов одного знака получаем модуль величины М-,, . а По знаку сигнала определяют нап- ра,вление действия М,
При действии крутящего момента My деформироваться, будет упругий элемент 3, на преобра-зователях 7 деформации которого появятся сигна- ль одного знака на одной стороне упругого элемента 3 и другого зна- ка - на противоположной стороне уп- pyroi o элемента 3. После инверсного суммирования сигналов получаем модуль величины Mj, а по знаку сигна
ла определяют направление действия момента MX- Аналогично определяются параметры крутящего момента М относительно оси Z.
Форм ула изобретения
Силомоментньй датчик, содержащий соосно расположенные первьш и второй силовоспринимающие фланцы, четыре упругих элемента в виде пластин прямоугольного сечения с широкими и узкими гранями и цилиндрическими хвостовиками, продольные оси которых расположены в плоскости, перпендикулярной оси датчика, перпендику- ;лярно одна другой,и пересекаются в точке, лежащей на оси датчика, и . преобразователи деформаций, размещенные на широких гранях упругих элементов, причем соединение первого фланца с цилиндрическими хвостовиками упругих элементов выполнено в виде цилиндрической двухподвижной кинематической пары, отличаю- щ и и с я тем, что, с целью уменьшения габаритов и повышения надежности, второй силовоспринимагощий фланец в зонах пересечения с продолными осями упругих элементов снабжен четырьмя замковыми пазами прямоугольного сечения, а торцы упр угих
б
В-8
элементов со стороны второго силовос- принимающего фланца выполнены в виде жестких хвостовиков прямоугольного сечения, входящих в зацепление через прямоугольные замковые пазы со вторым силовоспринимающим фланцем, большие стороны которых параллельны широким граням, а меньшие стороны - узким граням упругих элементов, при этом два смежных упругих элемента ориентированы так, что их широкие грани лежат в плоскости, перпендикулярной оси датчика, а два других смеж№1х упругих элемента - так, что их широкие грани лежат в плоскостях, параллельных оси датчика, причем геометрические размеры пазов и жест- 1КИХ хвостовиков прямоугольного сечения удовлетворяют соотношениям
In/ix 1,...,1,5; . 11,2,
где большая сторона поперечного сечения паза второго фпанца;
Е-х- большая сторона поперечного сечения жесткого хвостовика прямоугольного сечения;
h - меньшая сторона поперечного сечения паза второго фланца;
hy- меньшая сторона поперечного сечения жесткого хвостовика прямоугольного сечения.
ВидГ
О
Фиг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Силомоментный датчик | 1984 |
|
SU1216680A1 |
| Силомоментный датчик | 1983 |
|
SU1155878A1 |
| Очувствленный кистевой сустав робота | 1985 |
|
SU1569233A1 |
| Силомоментный датчик | 1984 |
|
SU1210072A1 |
| ДАТЧИК ДЛЯ СИЛОМОМЕНТНОГО ОЧУВСТВЛЕНИЯ РОБОТОВ | 2006 |
|
RU2306536C1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| Динамометрический датчик | 1986 |
|
SU1352262A1 |
| Очувствленное запястье руки робота | 1985 |
|
SU1355486A1 |
| Устройство управления | 1990 |
|
SU1795437A1 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
Изобретение может быть использовано Для силомоментного очувствления роботов различного назначения. Целью изобретения является повьш1е- ние надежности и уменьшение габари тов. Датчик укрепляют фланцем 2 к руке робота, а на фланец 1 воздействуют схватом робота с объектом манипулирования. При действии силы по оси датчика или крутящего момента будут деформироваться соответствующие упругие элементы 4-6 в виде пластин прямоугольного сечения с широкими и узкими гранями и цилиндрическими хвостовиками,.продольные оси которых перпендикулярны одна другой. На широких гранях упругих элементов размещены преобразователи 7 деформаций. Во фланце 2 в зонах пересечения с продольными осями упругих элементов выполнены четыре замковых паза прямоугольного сечения, через которые входят в зацепление с фланцем жесткие хвостовики прямоугольного сечения. Геометрические размеры пазов и хвостовиков удовлетворяют определенным соотношениям. 5 ил. с $ W аг. 1 1ч9 4ib lN9 ч со Фиг. 2
Редактор П. Коссей
Составитель В. Годзиковский
Техред О.ГортваиКорректорЛ. Патай
Заказ 3690/37 Тираж 778Подписное
ВНИИПИ Государственного.комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно
-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Тензорезисторный динамометр осевой силы и крутящего момента | 1974 |
|
SU579548A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Силомоментный датчик | 1983 |
|
SU1155878A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
