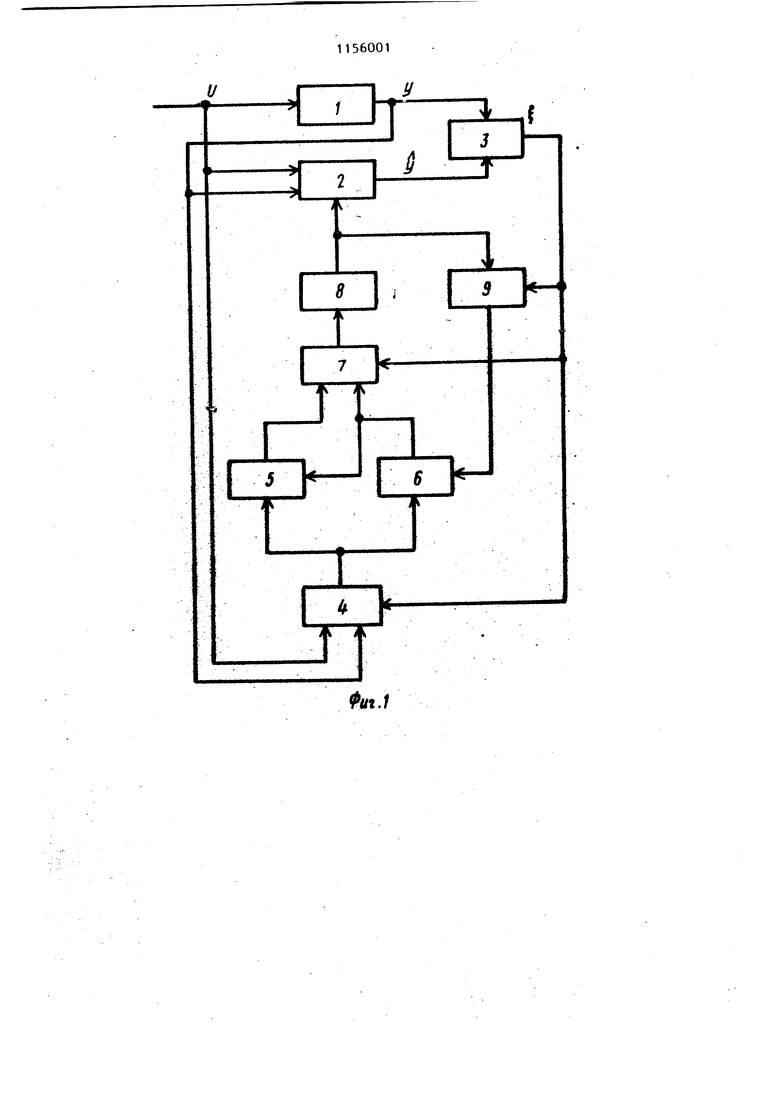
Изобретение относится к системам автоматического управления, а именно к адаптивньм системам управления. Известны системы идентификации параметров объекта, в которых подстраивается под объект его динамическая модель с целью минимизации сигнала, характеризующего степень несовпадения выходных переменных модели и объейта, в частности систе:ма идентификации параметров объекта содержащая блок реализации алгоритмов идентификации и последовательно соединенные блок управления, модель объекта, модель блока датчиков состояния объекта и блок сравнения, выходы которого соединены с вторыми входами модели объекта и первьми вхо дами блока реалиэа)щн алгоритмов идентификацни, выходы блока управления соединены с входами объекта, выходы которого соединены через блок датчиков состояния объекта с вторыми входами блока сравнения, выходы моде ли объекта через блок реализации алгоритмов идентификации соединены с третьими входами модели объекта, выходы которой соединены с вторыми входами блока реализации алгоритмов идентификации СО Недо гтаток таких систем - ограниченные функциональные возможности, .обусловленные тем, что они не могут удовлетворительно решать задачи параметрической идентификации, которые часто встречаются при построении адаптивных систем управления. Особен ность таких задач состоит в том, что из-за недостатка информации об идентифицируемом объекте существует не одна, а множество оценок парамет;ров модели, позволяющих минимизировать сигнал невязки реакций модели и объекта. Наиболее близкой по технической сущности к изобретемио является сиетема, содержащая модель, блок сравнения, первый и второй блоки реализа 1ИИИ алгоритмом идентификации Г2 . Недостатком известной системы является малое быстродействие, обус, лавленное тем, что оценки параметров полученные ранее системой, не исполь зуются при выработке новых оценок параметров в канале долговременной идентификации; .оценки параметров, получе нные в канале долговременной нденти мкации, не используются при выработке новых оценок параметров в 1 12 канале оперативной идентификации; при вычислении выходных переменных в модели приходится интегрировать уравнения, описывающие динамику объекта идентификации. Цель изобретения - повьппение быстродействия системы идентификации параметров объекта. Указанная цель достигается тем, что в систему идентификации параметров объекта, содержащую модель объекта идентификации, блок сравнения, блок памяти, блок запрета, первый и второй блоки реализации алгоритмов идентификации, коммутатор, первый вход модели объекта идентификации соединен с входом объекта идентификации, а ее выход и выход объекта идентификации соединены с первым и вторым входами блока сравнения, вход и выход объекта идентификации соединены с первым и вторым входами блока запрета, выход которого через первый блок реализации алгоритмов иденти(}ткации соединен с первым входом коммутатора, выход второго блока реализации алгоритмов идентификации соединен с аторым входом коммутатора, а выход блока сравнения соединен с управляющими входами коммутатора и блока запрета, введено реле времени, выход коммутатора через блок памяти соединен с вторья входом модели объекта ндентификации и входом реле времени, подключенньм выходом к второму входу второго блока реализации алгоритмов идентификации, первый вход которого соединен с выходом блока запрета, а выход подключен к второму входу первого блока реализации алгоритмов иденти4 1 кации, выход блока сравнения соединен с управляющим входом реле времени, а выход объекта идентификации соединен с TpetbHM входом модели объекта идентификации. Благодаря указанному вьтолненшо системы создается обратная связь, проходящая через коммутатор, блок na-i мяти, реле времени с выхода на вход второго блока реализации алгоритмов идентификации, с помощью которой полученные ранее в системе оценки nafmметров используются для получения новых оценок; образуется перекрестная связь с выхода второго блока peaJBtsaхдш алгоритмов идентификации на вход первого блока реализации алгоритмов вденти мхации, которая обеспечивает передачу оценок параметров из канала долговременной идентификации в канал оперативной идентификации; вводится связь между выходом объекта идентификации и третьим входом модели, KOTopaiB позволяет вычислять оценки фазовых скоростей объекта в зависимости от его текущего состояния без интегрирования уравнений движения. Совокупность указанных признаков приводит к повышению быстродействия , системы идентификации без ущерба для ее функциональных возможностей. На 4nir. 1 приведена функциональна схема предлагаемой системы; на фиг.2 пример реализации системы идентифика ции параметров на случай объекта, описьюаемого дифференциальным уравне нием второго порядкам X а X sij X где а - управляющее воздействие; х,х,х - компоненты выхода объекта у. Система содержит объект идентификации 1, модель 2 объекта ндентифика |ции, блок сравнения 3, блок запрета 4, первый блок реализации алгоритмов идентификации 5, второй блок реализа ции алгоритмов идентификации 6, коммутатор 7, блок памяти 8, реле времени 9, электронные умножители 10 аналоговых сигналов, трехвходовый сумматор 11, двухвходовый вычитатепь 12, прецизионный выпрямитель 13, пер вые электронные ключи 1А, компаратор 15, микро-ЭВМ 16, цифроаналоговые преобразователи 17, аналого-цифровые преобразователи 18, буферный регистр 19, двухпозиционные электронные ключи 20, электронные устройства выборк и запоминания 21, ждущий мультивибратор 22, вторые электронные ключи 23 На фигурах также обозначено: и управлякицее воздействие; у - реакция объекта идентификаций; у - реакция его модели; х,х.х - компоненты реакции объекта у; х - компонента реакции модели у; f - невязка выходных сигналов объекта 1 и модел1 1 2. Реализация предпагаемой системы не вызывает принципиальных затруднений и может быть осуществлена на . серийно выпускаемых устройствах. Модель 2 объекта идентификации может быть реализована на аналоговых умножителях и сумматорах. Трехвходовый сумматор 11 выполняется на базе операционного усилителя. Блок запрета 4 состоит из электронных ключей 14 и компаратора 15. Электронные ключи 14, а также реле времени 9 реализуются одинаково по схеме последовательного ключа на полевом транзисторе КП 201Л. Компаратор 15 может быть выполнен на базе интегрального компаратора 521СА2. Первый 5 и второй б блоки реализации алгоритмов идентификации реализуются на базе отечественных микроЗВМ Электроника-60. Исходные данные о состоянии рбъекта вдентификации 1 через блок запрета 4 поступают на вход аналого-цифровых преобразователей 18, а информация о выработанных ранее .оценках параметров 4 а st через электронные кттчи реле времени 9 - на аналого-цифровых преобразователей 18, где они преобразуются в цифровой код и вводятся а микро-ЭВМ в режиме прямого доступа в память. Передача оценок параметров из блока 6 в блок 5 канала оперативной идентификации ведется побайтно через буферный регистр 19, который реализуется на ИС К589ЙР12 и подключается между выходом микро ЭВМ 16i и входом микро-ЭВМ 16. Буферный регистр (К589ИР12) имеет в своем составе все необходимые устройства для подключения внешней микро-ЭВМ к единой магистрали данных. Новые оценки параметров , вырабатываемые микро-ЭВМ 16 и le, преобразуются из цифровой формы .. . . в аналоговую при помо1ци цифроаналоговь1х преобразователей 17. Алгоритмы параметрической идентификации на основе метода яаименьвшх квадратов, дающего систему линейных алгебраических уравнений относительно оцениваемых параметров, в общей внд« приведены в (3), а методы рещения линейных уравнений, в том чнсле и вырожденных, изложены Bi (4). Расчетные . формулы, к которым сводятся эти метода при реализации их на микро-ЭВМ приведены далее. Блок памяти 8 coctoHT иэ электронHtdX устройств выборки и запоминания аналоговьЬс сигналов 21, которые могут быть выполне ш на базе операционных усилителей, например К140УД7. Систем работает следующим обраом.
Процесс оценивания параметров в системе идентификации разделен по двум каналам: оперативному и долговременному. Оперативный канал (блок 5) используется для оценки параметров 5 по текущей выборке исходных данных, долговременный канал (блок 6) уточняет оценку на основании вновь поступающих данных и данных, накопленных ранее.
В каждом канале могут использовать-О ся различные алгоритмы параметрической идентификации (поисковые и беспоисковые).
Рассмотрим работу системы в случае, когда оба канала реализуют метод наи- И меньших квадратов. Структура объекта предполагается заданной, например, в виде Z AZ Ви, где zeR - вектор фазовых координат; ueR - вектор управления; А, В - подлежащие определению матрицы искомых коэффициентов . Например, для объекта идентификации (О матрицы А и В имеют вид причем Z (х ,Xj), X, X|j X. Согласно методу оценки параметров в виде расширенной матрицы параметров С в (|Ю являются решением системы линейных алгебраических уравнений/ёр R(4 где Р и R - матрищл, вычисленные на основании результатов измерений на ,входе и выходе системы: ;,г1и m ii4(i)4zi,u/f, zpiUj), . Поскольку в рассматриваемом приме ре часть параметров матриц А и В из вёстна, можно считать («, . а Вне зависимости от способа получения оценок параметров и объема вы.борки задача идентификации имеет неединственное решение, если переходные процессы на входе-выходе объекта недостаточно информативны (в этом случае матрица Р получается вьфожденной).
Для объекта идентификации 1 это справедливо, если объект, замкнут линейньми обратными связями по состоянию
4 ejXj
U - ,
Общее решение системы линейных алгебраических уравнений (4) можно получить из постановки дополнительной экстремальной задачи: на уравнениях связи (4), Как известно из (4), оно имеет вид б Со(Е - РР), (7) где + - символ псевдообращения; Е единичная матрица; Со - матрица притяжения. В качестве матрицы притяжения С, используют априорны оценки параметров, полученные на предыдущих этапах идентификации. Если такая информация отсутствует, то матрица выбирается произвольно, в частности нулевой, что и имеет место в системе-протот(1пе. Если матрица Р невырождена, то Р Р и задача идентификации будет иметь единственное решение: С « 9Р если матрица Р не содержит информации об объекте Р О, то Р « О и оценка параметров будет равна матрице притяжения, что следует из формулы (7). Фо1тулы (3) и (7) являются основой для алгоритмического обеспечения микро-ЭВМ 16 , 162 . Алгоритм псевдо обращения матрицы Р любого порядка изложен в (4). В предлагаемой системе матрица „ритяжения поступает на вход блока 16f канала оперативной иденти4я1кацин по {Перекрестной связи через бу ферный регистр 19 с выхода блока 16 какала долговременной идентификации. Для последнего канала априорная информация (матрица притяжения) поступавт с выхода аналогового блока памяти 8 через электронные ключи 23, ; 23j, 23 реле времени 9. Перед началом работы содержимое блока памяти 8 неопределенно, поэтому исходная матрица притяжения либо полагается произвольной либо вносится пользователем в микро-ЭВМ 16t на основании предварительного теоретического исследования, объекта.
По перекрестной связи эта оценка поступает в микро-ЭВМ 16 , посредйтвом блоков преобразуется в форму аналоговых сигналов и через электронные ключи 20 поступает в блок памяти 8. Устройство выборки и запоминания 21 блока памяти 8 переводится в режим запоминания одновременно с пуском цифроаналоговых преобразователей по сигналу управления, поступающему с четвертого выхода мик ро-ЭВМ 16 через коммутатор 7 на вторые входы устройства 21. Система идентификации готова к работе.
С выходов блока памяти 8 оценки праметров поступают на второй вход модели 2, где вычисляется оценка фазовой скорости объекта (в данном случае это :с, х) согласно уравнению (1) нли (3) объекта 1.
В блоке сравнения 3 вычисляется сигнал невязки фазовых скоростей объекта 1 и модели 2, который может формироваться различным образом в частности как геометрическая сумма невязок всех или части наиболее существенных фазовых скоростей модели 2 и объекта идентифика1ши 1. В данно случае с помощью вычитателя 12 и прецизионного выпрямителя 13 формируется сигнал
f
k - X . ,
Если сигнад рассогласования превьввает пороги срабатывания компараторов 15, то блок запрета открывается и пропускает аналоговые сигналы с входа и выхода объекта 1 через электронные ключи каналов оперативной и долговременной идентификации (блоки 5 и6) гкоммутатор 7 подключает анало-. говые входы блока памяти в через Двухпозиционные клочи 20, 20« , , 20 20 к выходам блоков 17, канала оперативной идентификации, а ждуций мультивибратор 22 реле времеИИ 9 подает сигнал на размыкание электронных ключей 23, Тем самым разрывая цейь обратной связи с выходов блока памяти 8 на входы блоков 18 канала долговременной идентификации на заданный промежуток времени, Если в течение этого промежутка сигнал рассогласования с вывода блока сравнения превысит пороговое значени компаратора 15j реле времени 9 вновь то выдержка времени устанавливается снова. Следовательно, обратная связь не будет -функционировать до тех пор, пока система идентификации не перейдет на дпительное время в устойчивое состояние, при котором сигнал рассогласования мал.
В микро-ЭВМ 16i канала оперативной идентификации вырабатывается новая оценка параметров по первой выборке исходных данных согласно формулам (5) и (7) и через коммутатор 7 передается в блок памяти 8. Задание исходной матрицы притяжения было оговорено.
Согласно методу, каковы бы не были условия идентификации, в тон числе и при условии недостатка информации об объекте, оперативная оценка параметров, поступакмцая с блока памяти В в модель 2, будет минимизировать величину рассогласования реакций модели 2 и объекта 1. При этом соблюдение условия (6) придает этой оценке устойчивый характер и при наличии шумов измерений, искажающсх область возможных решений уравнения идентификации (4),
Величина невязки уменьщается до пороговой величины, вследствие чего срабатьшают блок запрета 4,коммутатор 7 и реле времени 9.
Электронные ключи 14 блока запрета 4 размыкаются по сигналу компаратора 15 и прекращают доступ исходных данных в систему идентификации. Ключи коммутатора 7 перекидываются в положение, при котором входы блока памяг ти 8 подключены к выходам блоков 17 канала долговременной идентификации.
В канале долговременной идентификации происходят процессы выработки более точной оценки параметров, что проявляется после нескольких повторных срабатываний cиcтe aa идентификации по превышениюсигналом невязки порогового значения. В отличие от канала оперативной идеити осации в блоке 6 выработка оценки параметров происходит не только по текущей выг борке исходных данных, но и по (К-t) предыдущим. Для этого реализуется дополнительное cy миpoвaниe согласно (5) по текущей и по (К-1) предьздущим выборкам исходных данных. В микро-ЭВМ 16 можно хранить только. суммарные массивы Р ...,PX-I , R, , R ,...,Rj{,., где индекс обозначает номер выборки. Суьмарные массивы образуются,как PI Ц Rf-SRnRv (8 Оценивание должно происходить по суьшарным массивам: ё СО(Е - ) Так как объем хранящихся исходных данных конечен, происходит нх постепенное обновление, что позволяет отслеживать дрейф параметров объекта идентификации 1. В силу большого объема суммарной выборки с нескольки участков идентификации задача параметрической нденти4мкации становится 25 лучше обусловленной что овеспечивает хорошую точность нахождения долговрю4ен«ой оценки параметров. Через коммутатор 7 эта оценка .ноступает в блок памяти 8 и далее на входы модели, 2. По перекрестной связи эта оценка передается через буферный регистр 19 в м1асро-Э1Ш 16 канала оперативной 1 0110 идентификации, где она запоминается и используется в качестве матрицы притяжения. Если длительное время не происходит уточнение оценки параметров и сигнал блока сравнения 3 мал, то ждущий мультивибратор 22 реле времени 9 заканчивает свою работу и переходит в состояние, при котором управляемые им электронные клаочи 23 соединяют выходы блока памяти 8 и входы блоков 18;:. канала долговременной идентификации. По петле обратной связи происходит коррекция матриф притяжения в памяти микро-ЭВМ 16 для канала долговременной идентификации. По перекрестной связи через буферный регистр 19 эта матрица переписывается также в память микро-ЭВМ 16у канала оперативной идент}|фикации. Таким образом, предлагаемая система идентификации позволяет сократить время, в течение которого оцениваются параметры объекта и вычисляется его реакция на управляющее воэдействие, что связано с отсутствием операции интегрирования, и число итераций-циклов срабатывания блоке сравнения, в течение которых уточняются оценки параметров объекта, что связано с более полньм исаользоват ем априорной инфо Я4ацииоб объекте,т.е. возрастает быстродействие сие темы в целдм.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система идентификации параметров объекта | 1986 |
|
SU1413597A1 |
| Система идентификации параметров объекта | 1980 |
|
SU949635A1 |
| СИСТЕМА ДИСТАНЦИОННОГО РАДИАЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ ОБЪЕКТА | 1999 |
|
RU2182343C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ СОСТОЯНИЯ БИООБЪЕКТА | 1994 |
|
RU2153844C2 |
| УСТРОЙСТВО ЗАЩИТЫ ИНФОРМАЦИИ ОТ НЕСАНКЦИОНИРОВАННОГО ДОСТУПА ДЛЯ КОМПЬЮТЕРОВ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНЫХ СИСТЕМ | 2006 |
|
RU2321055C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ, НЕЙРОСЕТЕВЫМ РАСПОЗНАВАНИЕМ ОБЪЕКТОВ И ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2011 |
|
RU2439611C1 |
| УСТРОЙСТВО СОЗДАНИЯ ДОВЕРЕННОЙ СРЕДЫ ДЛЯ КОМПЬЮТЕРОВ СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ | 2014 |
|
RU2569577C1 |
| УСТРОЙСТВО СОЗДАНИЯ ДОВЕРЕННОЙ СРЕДЫ ДЛЯ КОМПЬЮТЕРОВ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНЫХ СИСТЕМ | 2013 |
|
RU2538329C1 |
| УСТРОЙСТВО МНОГОКАНАЛЬНОЙ АДАПТИВНОЙ КОМПЕНСАЦИИ ЭХО-СИГНАЛОВ | 2019 |
|
RU2722220C1 |
| Адаптивный идентификатор | 1989 |
|
SU1647515A1 |

СИСТЕМА ВДБ№Ш 1«КАЩМ ПАРАМЕТРОВ , содержащая модель .ндентифика11
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ОБЪЕКТАУПРАВЛЕНИЯ | 1972 |
|
SU429415A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система идентификации параметров объекта | 1980 |
|
SU949635A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| (прототип). | |||
