1
Изобретение относится к автоматике и может найти широкое применение при проектировании современных систем автоматического управления различными объектами с переменными параметрами.
Известны устройства для идентификации объекта управления, содержащие блок управления, выходы которого подключены к входам объекта управления, к входам блока набора коэффициентов усиления управлений и к основным входам модели объекта управления, выходы которой подключены к входам блока набора коэффициентов усиления оценок и через модели чувствительных элементов - к первым входам блока сумматоров сравнения, вторые входы которых соединены с выходами чувствительных элементов фазовых координат (переменных состояния) объекта управления, первые выходы блока сумматоров сравнения соединены через блок набора коэффициентов усиления ошибок с входами блоками сумматоров ошибок, выходы которого соединены с первыми входами блока множительных устройств, вторые выходы которого соединены с выходами блока набора коэффициентов усиления управлений и с выходами блока набора коэффициентов усиления оценок, а выходы блока множительных устройств соединены через устройства настройки параметров модели с входами .настройки модели объекта управления.
Однако в таких устройствах при наличии помех на входах модели объекта управления появляется смещение оценок параметров объекта управления. Кроме того, при формировании управления объектом по оценкам его фазовых координат (оценкам переменных состояния) система управления оказывается разомкнутого типа. Отсюда возникает невозможность учета ненулевых начальных условий объекта управления и появляются ошибки управления, а также отсутствует возможность управления неустойчивым объектом.
Известны системы оценок фазовых координат объекта управления (оценок переменных состояния). Система оценки фазовых координат объекта управления представляет собой устройство, содержащее чувствительные элементы фазовых координат объекта управления, блок сумматоров сравнения, модели чувствительных элементов и модель объекта управления, основные входы которой подключены к выходам блока управления, выходы модели объекта подключены через модели чувствительных элементов к первым входам блока сумматоров сравнения, вторые входы которого соединены с выходами соответствующих чувствительных элементов, а выходы блока сумматоров сравнения - со вспомогательными входами модели объекта управления для коррекции сигналов оценок фазовых координат.
В таких системах при неизвестном коэффициенте объекта управления возникают погрешности определения оценок фазовых координат объекта управления. Кроме того, система оценки не позволяет определять неизвестные параметры (коэффициенты) объекта управления.
Введение в такие устройства для идентификации объекта управления коррекциоиных связе на модель объекта управления, т. е. подключение вторых выходов блока сумматоров сравнения к вспомогательным входам модели объекта управления, повышает точность оценки параметров объекта управления и точность оценки фазовых координат (переменных состояния) объекта управления. Введение, этих коррекционных связей позволяет сформировать замкнутую систему управления по оценка фазовых координат объекта управления.
Недостаток устройства для идентификации в виде смещения оценок параметров объекта управления из-за наличия помех остается и при введении коррекционных связей на модель.
Цель изобретения - повышение точности определения оценок параметров объекта управления и оценок фазовых координат (переменных состояния) объекта управления и устранение смещения оценок параметров объекта управления из-за наличия помех измерения управляющих воздействий и фазовых координат объекта управления.
Эта цель достигается введением в устройСТ1ВО для идентификации блока сумматоров настройки и блока набора коэффициентов усиления смещений, входы которого соединены с первыми выходами блока сумматоров сравнения, а выходы - с первыми входами блока сумматоров настройки, вторые входы которого соединены с выходами блока набора коэффициентов усиления управлений и третьи входы - с выходами блока набора коэффициентов усиления оценок, причем выходы блока сумматоров настройки подключены ко вторым входам блока умножителей.
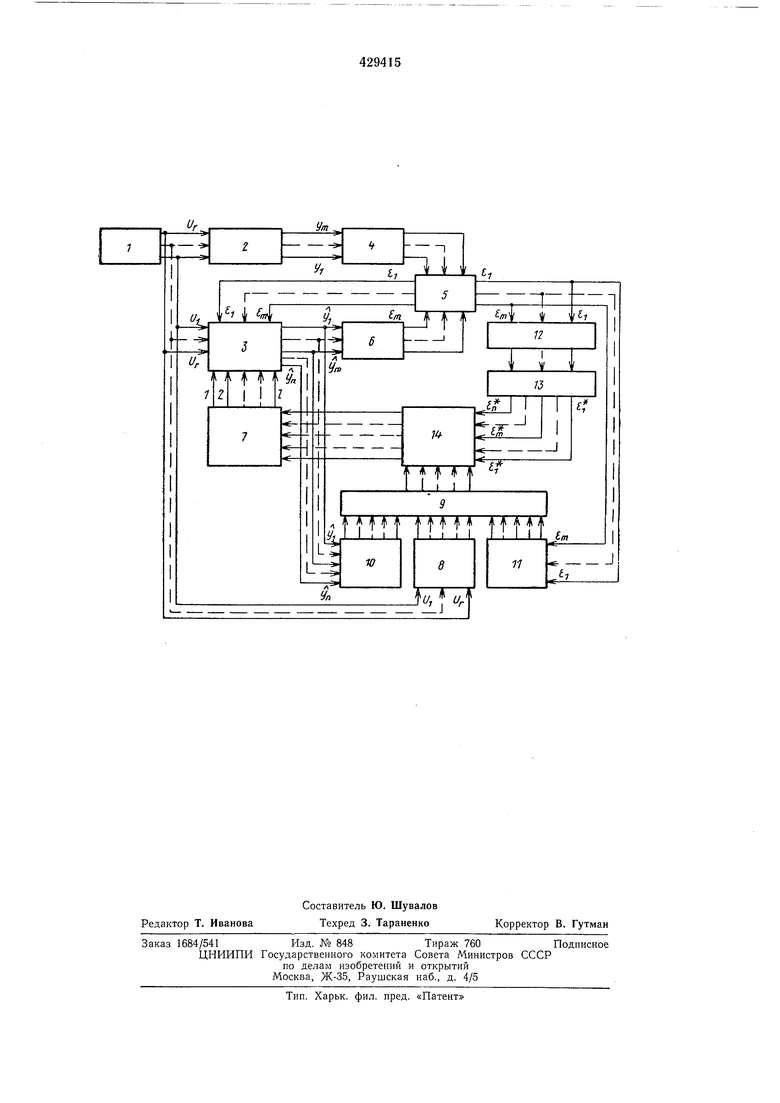
На чертеже изображена блок-схема предлагаемого устройства для идентификации объекта управления для варианта нестационарного объекта п-го порядка с числом управляющих воздействий, равным г, числом переменных коэффициентов объекта, равным /и cm измеряемых фазовых координат (переменных состояний).
С выходов блока управления /, представляющего собой, например, блок операционных усилителей-сумматоров, управляющие воздействия t/i, f/2, .-., LIr поступают на входы нестационарного объекта управления 2 н на основные входы модели 3 объекта управления (включающей модели исполнительных устройств и возмущающих воздействий), выполненной, например, в виде олока операционных усилителей-интеграторов и сумматоров. Выходные фазовые координаты УЬ У, . . .Ут объекта управления 2 измеряют с помощью чувствительных элементов 4 и подают на вторые входы блока 5 сумматоров сравнения, выполненного, например, в виде блока операционных зсилителей-сумматоров. Выходные координаты (оценки.) У, У, ... ,Ут модели объекта управления, соответствующие измеряемым фазовым координатам УЬ У2, .-, Ут объекта управления, подают через модели 6 чувствительных элементов, выполненных, например, в виде блока операционных усилителей-интеграторов и сумматоров, на первые входы блока 5 сумматоров сравнения. Со вторых выходов блока сумматоров сравнения разностные сигналы еь eg, ...,s/« измеренных
фазовых координат объекта управления УЬ У2, ..., Ут и соответствующих им оценок
л лл
УЬ У2,..., Ут фазовых координат объекта управления подают на вспомогательные входы модели 3 объекта управления для коррекции
л ллл
всех фазовых координат УЬ У2. .., .. . , У„ модели объекта, являющихся оценками всех фазовых координат УЬ У2,..., Ут,..-, УП объекта управления. Входы настройки 1,2,...,/ модели 5 объекта управления соединены с выходами устройств 7 настройки параметров модели объекта управления, выполненных, например, в виде блока операционных зсилителсй и сервомеханизмов с потенциометрами
для изменения коэффициентов модели объекla. Управляющие воздействия Ui, Us,..., U,- с выходов блока управления / подают и на входы блока 8 набора коэффициентов усиления управлений, выполненного, например, на
потенциометрах, а с выходов блока 8 - на вторые входы блока 9 сумматоров настройки, выполненного, например, в виде блока операционных усилителей-сумматоров. На третьи входы блока сумматоров .настройки подают
через блок 10 набора коэффициентов усиления оценок, выполненный, например, на пол лл
тенциометрах, сигналы оценок УЬ У2 , Ут,
л
..., УП всех фазовых координат с выходов модели 3 объекта управления. На первые входы блока 9 подают через блок 11 набора коэффициентов усиления смещений, выполненный, например, на потенциометрах, сигналы рассогласований еь 62,..., 6т с первых выходов
блока 5 сумматоров сравнения. С тех же выходов блока сумматоров сравнения разностные сигналы 61, б2,..., Вт подают через блок 12 набора коэффициентов усиления ошибок, выполненный, например, на потенциометрах, на
входы блока i/5 сумматоров ошибок, выполненного, например, в виде блока операционных усилителей-сумматоров.
С выходов блока 13 сумматоров ошибок комбинированные сигналы разностей ej, 62..,
6,n, .-, БП подают на первые входы блока 14 множительных устройств, выполненного, например, на квадраторах или линейных детекторах или схемах сравнения, на вторые входы которого подают сигналы с выходов блока 9 сумматора настройки. Сигналы с выходов блока 14 поступают на входы устройств 7 настройки параметров модели объекта управления. Устройство работает следующим образом. Известная система оценки, состоящая из блока управления 1 нестационарным объектом 2, модели 5 объекта управления (включающей модели исполнительных устройств и возмущающих воздействий), чувствительных элементов 4, блока 5 сумматоров сравнения, моделей 6 чувствительных элементов, представляет собой устройство наблюдения, с помощью которого получают рабочую информацию ,в Виде оцено,к фазовых координат объекта для формирования управления нестационарным объектам. Структура .получения сигналов л ллл оценок У, УЗ, ..., Ут, -, УП всех фазовых координат У, У2,..., Ут, .-., УП объекта управления такова, что, в предположении отсутствия ощибок измерения, выбором соответствующего усиления сигналов разностей еь 82,..., бт интеграторами модели 3 объекта можно приблизить сколь угодно точно все сигналы оцел ллл нок УЬ У2, ..., Ут,.-., УП фазовых координат к соответствующим фазовым координатам У, Уг,..., Ут, ; УП объекта. Однако выбор усиления ошибок еь 82,..., em интеграторами модели объекта при учете «аличия помех в измеренны х сигналах фазовых координат УЬ У2, -, Ут и учете реальных нелинейностей объекта управления, например, в виде ограничений типа насыщения и люфта, приводит к тому, что величины выбранных коэффициентов усиления ошибок оказываются меньше необходимых значений (для случая отсутствия помех). Это приводит к снилсению точности системы оценки и, как следствие, к снижению точности работы системы автоматического управления нестационарным объектом, в состав которой данная система оценки может входить как устройство формирования рабочей информации (устройства наблюдения). Подключением к системе оценки устройств 7 настройки параметров модели объекта управления, блока 8 набора коэффициентов усиления управлений, блока 9 сумматоров настройки, блока 10 набора коэффициентов усиления оценок, блока // набора коэффициентов усиления смещений, блока 2 набора коэффициентов усиления ошибок, блока 13 сумматоров ошибок и блока 14 множительных устройств формируют цепи автоматической несмещенной настройки параметров (коэффициентов) модели 3 объекта управления с повышенной точностью, т. е. цепи приведения в соответствие коэффициентов модели объекта управления с изменяющимися коэффициентами нестационарного объекта управления с учетом устранения смещения оценок параметров из-за наличия помех изме рения и с учетом использования для настройки параметров модели объекта суммы всей полезной информации, которая может быть измерена (управления U, оценки фазовых координат У, ошибки е). Это, в свою очередь, приводит к повышению точности оценки фазовых координат объекта управления. Предлагаемое устройство работает таким образом, что малые рассогласования (ошибки) 8i, 62, ..., Em МеЖДу ИЗмеряемыми фазовыми координатами УЬ У2, ..., У,п и их оценками У, У2, ..., Ут, обусловленные малыми изменениями коэффициентов объекта управления и малыми возмущающими воздействиями на объект управления, устраняются с помощью системы оценки. При больших изменениях коэффициентов объекта управления или достаточно больших возмущающих воздействиях на объект сильно изменяются и измеряемые фазовые координаты У, У2,..., УПГ объекта управления, возрастаюти их отличия от соответствующих сигл л л налов оценок У, У2, -. Ут фазовых координат. При достижении заданных порогов чувствительности по рассогласованиям (ошибкам) еь S2,..., &т в работу включается цепь автоматической настройки параметров модели объекта управления, которая приводит в соответствие коэффициенты модели и коэффициенты объекта и устраняет рассогласования фазовьши координатами У,, у,-., Уш, ...,У« объекта управления и их сол ллл ответствующими оценками УЬ У2,..., Ут, , УПв качестве примера рассматривают нестационарный объект первого порядка с двумя переменными коэффициентами и одной измеряемой фазовой координатой. Чувствительный элемент принимают в виде пропорционального звена с коэффициентом передачи, равным 1. Объект управления описывается дифференциальным уравнением -аУ. где У - измеряемая фазовая координата объекта управления; и - управляющее воздействие, которое поддается измерению; а VI b - переменные коэффициенты объекта управления. Уравнение системы оценки фазовой координаты имеет вид dyл л л аУ+ ьи + К (У - У),(2) где У - оценка измеряемой фазовой координаты объекта управления; а н b - коэффициенты уравнения модели объекта управления; К - коэффициент усиления ошибки. Вычитая из уравнения (1) уравнение (2), получают с учетом добавки в правую урав нения члена (аУ-аУ) и замены У-У е, где 8 - ошибка системы оценки, + (K + a} (b-b}U-(a-a)y. (3) С учетом обозначения е е - /С получают уравнение (3) в виде (Ь-Ь)и-( (4) При /С- 00 уравнение (4) вырождается и принимает вид. е :(Ь-Ь)и - (а--а)У. При минимизации по методу градиента функции / е, получают законы изменения коэффициентов модели в виде §,. -q,y, где 1 и 2 - коэффициенты пропорциональности. При известном коэффициенте а, т. е. а а, уравнение (6) с учетом уравнения (5) примет вид, db ., . ..„1 dt -rr + b b. (8) Так как член q U положительный, уравнение (8) представляет устойчивую систему подстройки коэффициента Ь модели объекта к коэффициенту b объекта управления. Проделав аналогичную операцию для случая известного коэффициента Ь, т. е. b b, получают уравнение (7) в виде - q,(a-a)y . + а а.(9) Так как член 2 У всегда положителен, то система (9) устойчива и коэффициент а модели стремится к коэффициенту а объекта управления. Часто у реальных объектов существует корреляция коэффициентов а и Ь. Если справедливо соотношение .b,(10) где / - коэффициент пропорциональности, то с учетом уравнения (10) получают общий вид законов настройки коэффициентов b и а модели объекта q,UB-+q,,ye- q,,Ue- + q,,y, где qn, qi2, qz, 22 - коэффициенты пропорциональности, например постоянные. При наличии помехи g в измеренном сигнале У, как правило высокочастотной, т. е. когда (e+g), может иметь место корреляции помехи I с оценкой У н управляющим воздействием U (если управляющее воздействие и формируют в фунКции оценки У фазовой координаты). Это приводит к некоторому смещению в процессе настройки коэффициентов Ь И а модели объекта управления. Для устранения смешения в законы (И) и (12) настройки коэффициентов модели необходимо ввести поправки, пропорциональные )фовню .помехи |. Уровень помехи можно оценить ,в виде сигнала, пропорционального s, либо при известном и неизменном уровне помехи взять в виде постоянной величины. При учете помехи законы (11) и (12) настройки коэффициентов модели объекта управления примут обобщенный вид dhл (Zii + д,,У + flis S) + const,; (13) ( + 9,2 + 923 e) . s + consts, (14) где 9ib , Qiz, , qzz, 23 - коэффициенты пропорциональности, например постоянные. В предлагаемом устройстве реализуются законы настройки коэффициентов модели объекта для случая consti 0 и const2 0. Реализация обобщенных законов (13) и (14) настройки .коэффициентов в /полном виде практически не усложняет задачи и приводит лишь к введению дополнительных постоянных сигналов на устройства 7. Достоинством обобщенных законов (13) и (14) настройки коэфф.ициентов модели объекта является то, что их реализация требует для настройки одного коэффициента наличия лишь одного множительного устройства. При объекте управления более высокого порядка замером нескольких фазовых координат объекта управления можно повысить точность настройки коэффициентов без усложнения закона настройки. Для упрощения реализации предлагаемого
устройства :можно в оооощенлых законах настройки (13) и (14) iBiBecTH умножение на зна« ошибки е вл1ест.о умножения «а ошибку е. Упрощенный вид обобщенных законов настройки коэффициентов модели объекта при1ни:мает вдад
db
г- (Qn + Я12 }51ёпг + (7,3 И,
dt
л
da
---г (q.U + q,,Y) signs + зз 1 . dt
При реализации упрощенных обобщенных законов (15) и (16) поправки (в) на смещение по помехе с чувствительного элемента мо,гут быть получены с помощью выпрямителя.
Таким образом, предлагаемое устройство идентификации объекта управления повыщает точность определения оценок параметров объекта управления и оценок фазовых координат (переменных состояния) объекта управления и устраняет смещение оценок параметров объекта управления из-за наличия помех измерения управляющих воздействий и фазовых координат объекта управления.
Достоинством предлагаемого устройства является простота его реализации при максимальном использовании информации, которая циркулирует в устройстве и может быть получена непосредственным измерением без дополнительных сложных преобразований. При настройке каждого неизвестного коэффициента устройство выполняет простейшие операции усиления, суммирования и может содержать лишь одну операцию умножения. Предлагаемое устройство может быть упрощено при использовании операции умножения на знак одного из сигналов сомножителей (практически без особого снижения точности).
Предлагаемое устройство позволяет получить уточ.не1нные оценки всех п фазовых координат нестационарного объекта п-го порядка и при этом избежать дифференцирования в яв.ном виде сигналов измеренных фазовых координат объекта управления, что повышает помехозащищенность устройства.
Кроме того, предлагаемое устройство иожпо реализовать в виде набора идентичных блоков, выполненных на современных унифицированных аналоговых или цифровых элементах, например на операционных усилителях и квадраторах.
Предлагаемое устройство является реализацией идей создания современной системы управления, в которой выполняются задачи изучения объекта и приведения объекта к требуемому режиму. Оно выполняет первую задачу - задачу изучения объекта. При использозэнии предлагаемого устройства в системе автол атического управления нестационарным объектом в качестве устройства оценки фазовых координат и устройства идентификации
параметров объекта можно существенно повысить точность работы системы управления и обеспечить условия инвариантности (независимости) качественных показателей системы управления относительно возмущающих
воздействий и переменных параметров объекта управления при выполнении требования помехозащищенности.
5
Предмет изобретения
Устройство для идентификации объекта управления, содержащее блок управления,
выходы Которого подключены.к входам объекта управления, к входам блока набора коэффициентов усиления управлений и к основным входам модели объекта управления, выходы которой подключены к входам блока набора коэффициентов усиления оценок и через модели чувствительных элементов - к первым входам блока сумматоров сравнения, вторые входы которых соединены с выходами чувствительных элементов фазовых координат
объекта управления, а первые выходы блока сумматоров сравнения соединены через блок набора коэффициентов усиления ошибок с входами блока сумматоров ошибок, выходы которого соединены с первыми входами блока
умножителей, выходы которого подключены через блоки настройки параметров модели объекта управления к входам настройки модели объекта управления, а вторые выходы блока сумматоров сравнения соединены со
вспомогательными входами модели объекта управления, отличающееся тем, что, с целью повышения точности определения оценок параметров объекта управления и оценок фазовых координат объекта управления, а также
устранения смещения оценок параметров объекта управления из-за наличия помех измерения управляющих воздействий и фазовых координат объекта управления в устройство введены блок сумматоров настройки и блок
набора коэффициентов усиления смещений, входы которого соединены с первыми выходами блока сумматоров сравнения, а выходы - с первыми входами блока сумматоров настройки, вторые входы которого соединены
с выходами блока набора коэффициентов усиления управлений, а третьи входы - с выходами блока набора коэффициентов усиления оценок, причем выходы блока сумматоров настройки подключены ко вторым входам блока
умнолсителей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МНОГОМЕРНЫМ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ1^ГНЛ"ФОВД | 1972 |
|
SU429642A1 |
| МНОГОМЕРНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1974 |
|
SU429640A1 |
| Адаптивное устройство для идентификацииОб'ЕКТА упРАВлЕНия | 1978 |
|
SU798701A1 |
| Адантивное устройство для идентификации объекта управления | 1987 |
|
SU1478190A1 |
| Устройство управления весовым порционным дозатором | 1981 |
|
SU1008625A1 |
| Адаптивная система для идентификации объекта управления | 1980 |
|
SU875337A1 |
| СПОСОБ АДАПТИВНОГО СОПРОВОЖДЕНИЯ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2679598C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2586399C2 |
| Адаптивный идентификатор | 1989 |
|
SU1670674A1 |
| Система управления | 1991 |
|
SU1792539A3 |