Изобретение относится к автоматизации производственных процессов на открытых горных разработках и в строительстве и может найти применение на вскрышных и добычных роторных экскаваторах. Известен способ управления процессом копания роторного экскаватора с невыдвижной стрелой, заключающийся в стабилизации одного из показателей процесса - нагрузки рабочего органа экскаватора, весовой или объемной производительности. Выбор выходного показателя и уровня, на котором стабилизируется процесс, выполняется при этом оператором на основе анализа работы всех звеньев горнотранспортного комплекса 1. Однако при работе экскаватора в забое, имеющем переменные физико-химические свойства, любой из этих показателей может быть ограничивающим и задача выбора того или иного выходного показателя, а также его уровня становится трудноразрешимой. Вследствие этого фактическая производительность экскаватора оказывается, как правило, или меньше той, которая может быть достигнута для данных физикопмеханических свойств забоя, или превосходит то ее значение, которое соответствует расчетным нагрузкам на рабочее оборудование и экскаватор в целом. Таким образом, происходит или недоиспользование силовых характеристик экскаватора, или превышение расчетных значений его нагрузки, что является причиной аварийных простоев. В обоих случаях происходит снижение эксплуатационной производительности Экскаватора. Известен способ управления роторным экскаватором, согласно которому задают уровень производительности и вычисляют начальное установочное значение скорости как частное от деления заданного уровня производительности на произведение толщины стружки и высоты подступа, и с целью компенсации уменьшения толщины стружки на резе изменяют расчетное значение скорости поворота по закону seci|), где i|3 - угол поворота роторной стрелы 2. Однако согласно данному способу производительность задают без учета изменения свойств экскавируемой горной массы (крепость, удельный вес), а также состояния оборудования, что может привести к недогрузке экскаватора (недоиспользованию по производительности) или к его перегрузке. Кроме того, регулирование скорости поворота по закону seci|3 неприемлемо для сложноструктурных забоев, так как не учитывает изменение крепости горных пород при отработке реза. Известен также способ автоматического управления роторным экскаватором, основанный на задании допустимой нагрузки привода роторного колес, измерении ее фактического значения, вычислении относительного уровня нагрузки привода роторного колеса и определения скорости привода поворота. При этом производительность для последуюшего реза задают как частное от деления производительности на предыдущем резе на относительный уровень нагрузки. Затем вычисляют начальное значение скорости поворота как частное от деления заданного .уровня производительности на произведение толщины стружки и высоты подступа и изменяют скорость поворота по закону seca|) 3. Однако при реализации известного способа контролируют только один выходной показатель и его уровень, по которому выбирается установочное значение скорости боковой подачи - нагрузку привода рабочего органа. Но при работе в сложноструктурном забое ограничивающими параметрами могут оказаться выходные показатели других механизмов, участвующих в экскавации и транспортировании горной массы, например нагрузка механизма поворота или пропускная способность конвейера экскаватора. При этом возможны перегрузки указанных механизмов, приводящие к аварийным простоям экскаватора и снижению его эксплуатационной производительности. Известный способ не позволяет управлять уровнем нагружения роторного экскаватора в процессе отработки реза при изменении горно-механических свойств забоя вдоль реза, что может привести как, к перегрузкам и аварийным отказам механизмов экскаватора на прочных участках реза, так и к недоиспользованию экскаватора по производительности на слабых участках. Целью изобретения является повышение точности управления путем ограничения нагрузок приводов экскаватора. Поставленная ц«ль достигается тем, что согласно способу автоматического управления роторным экскаватором, основанному на задании допустимой нагрузки привода роторного колеса иа каждом реле, измерении ее фактического значения и вычислении относительного уровня иагрузки привода роторного колеса и определения скорости привода поворота, дополнительно задают допустимые уровни нагрузки привода поворота и конвейера иа каждом резе экскаватора, разбивают рез интервалов, на каждом интервалеизмеряют фактические значения нагрузок приводов роторного колеса, поворота и конвейера, а фактическое значение нагрузок на каждом резе определяют как их среднее значение, вычисляют относительные уровни нагрузок приводов как частное от деления средиего значения нагрузок на их допустимые значения и запоминают их, затем на каждом интервале сравиивают относительиые уровни нагрузок всех контролируемых приводов между собой, выделяют из них наибрль
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ задания скорости поворотного механизма роторного экскаватора | 1979 |
|
SU910942A1 |
| Устройство для контроля и учета работы добычного роторного экскаватора | 1983 |
|
SU1145089A1 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 2023 |
|
RU2817340C1 |
| Автоматизированная система управления рабочим процессом роторного экскаватора | 1985 |
|
SU1703797A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
| Устройство для автоматического управления роторным экскаватором | 1987 |
|
SU1434039A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU876867A1 |
| Устройство управления роторным экскаватором | 1978 |
|
SU723045A1 |
| Способ управления роторным комплексом и устройство для его осуществления | 1987 |
|
SU1537776A1 |
СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ, основанный на задании на каждом резе допустимой нагрузки привода роторного колеса, измерении ее фактического значения, вычислении относительного уровня нагрузки привода роторного колеса и определении скорости привода поворота, отличающийся тем, что, с целью повышения точности управления путем ограничения нагрузок приводов экскаваторов, дополнительно на каждом резе экскаватора задают допустимые нагрузки привода поворота и конвейера, разбивают рез на п интервалов, на каждом интервале измеряют фактические значения нагрузок приводов роторного колеса, поворота и конвейера, а фактическое значение нагрузок на каждом резе определяют как их среднее значение, вычисляют относительные уровни нагрузок приводов как частное от деления среднего значения нагрузок на их допустимые значения и запоминают их, затем на каждом интервале сравнивают относительg ные уровни нагрузок всех контролируемых приводов между собой, выделяют из них (Л наибольший и скорость привода поворота определяют для каждого /г-го интервала последуюшего реза как частное от деления значения скорости привода поворота на значение наибольшего относительного уровня нагрузки на fe-ом интервале предыдущего реза. 01 Од сх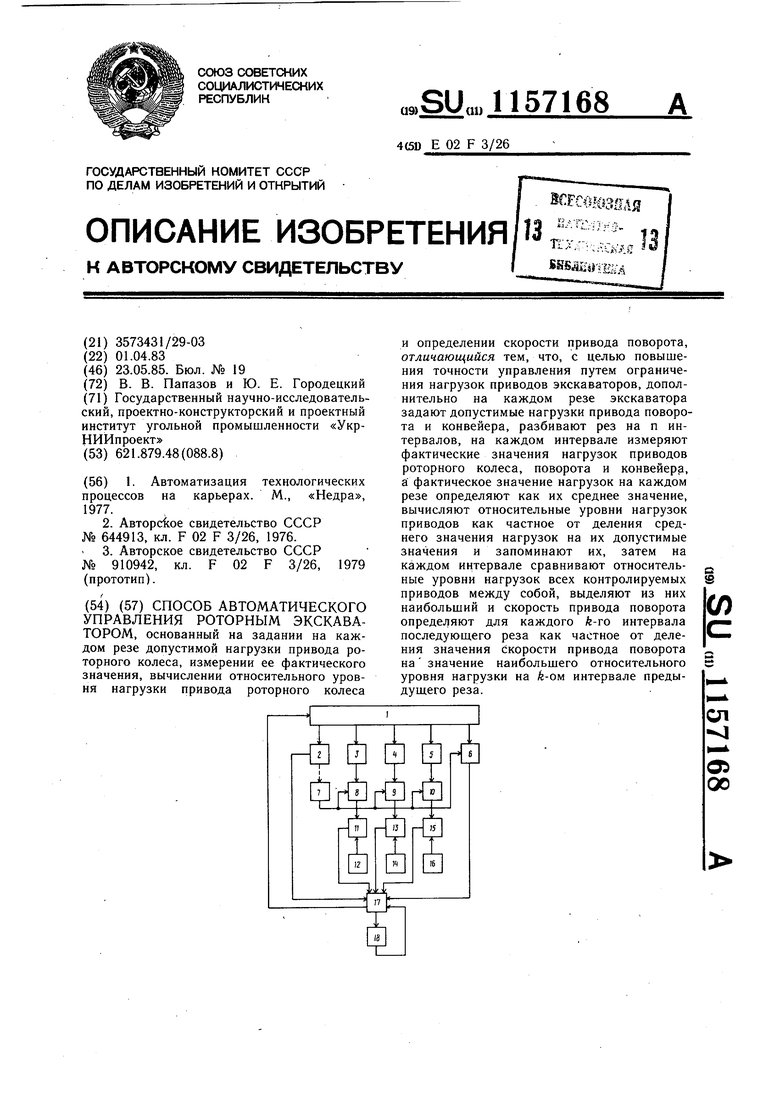
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автоматизация технологических М., «Недра, процессов на карьерах 1977 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
