ка деления, выход второго интегратора соединен с вторым входом четвертого и первым входом пятого блока деления, выход третьего интегратора -соединен с вторым входом седьмого и первым входом восьмого блока деления, выход четвертого интегратора соединен с вторым входом десятого и первым входом одиннадцатого блока деления, первь# выход блока измерени времени работы соединен с первыми входами второго, девятого и десятого блоков деления, а третий вьЬсод блока измерения времени работы соединен с управляющим входом четвёртого коммутатора, причем выходы всех блоков деления соединены с соответствующими индикаторами.
2. Устройство по п. 1, о т л и чающее с я тем, что блок измеренгзл времени работы состоит .из трех элементов HJTli, пятивходового элемента И, трех элементов И, генератора импульсов, двоичного счетчика, индикатора, электромеханического счетчика и цифроаналогового.преобразователя, причем второй вход первого элемента И является первым .входом блока, первый и второй входы первого элемента ИЛИ являются соответственно вторым и третьиьг входами блока, второй, третий, четвертый и пятый входы пятивходового элемента И являются соответственно четвертым, пятым, шестым и седьмьм- входами блока, а первый и второй входы второго элемента ИЛИ являются соответственно восьмым и девятым входами блока измерения времени работы, при этом выход.первого элемента ИЛИ соединен с первым входом пятив.ходового элемента И, выход которого подключен к первому входу первого элемента И и первому входу второго элемента И, второ вход которого соединен с выходом второго элемента ИЛИ, а выход - с вто5089
рым входом третьего элемента ИЛИ, первый вход которого соединен с выходом первого элемента И, а выход соединен с третьим выходом блока и первым входом третьего элемента И, выход генератора импульсов соединен с BTopbiM входом третьего элемента И, вькод которого соединен с вторым выходом блока и входами двоичного и электромеханического счетчиков, выход двоичного счетчика соединен с входом индикатора и через цифроаналого1зый преобразователь соединен с первым выходом блока измерения времени работы. .
; 3. Устройство по п. 1, о т л и.чающееся тем, что каждьй
дополнительный блок измерения вре. мени состоит из индикатора, электромеханического счетчика и последовательно соединенных элемента И, двоичного счетчика и цифроаналогового преобразователя, выход которого соединен с выходом блока, индикатор соединен с выходом двоичного счетчика, а электромеханический счетчик с выходом элемента И, входы которого являются входами дополнительного блока измерения времени работы.
4.Устройство по п. 1, о т л и .4 а ш щ е е с я тем, что блок определения выработки экскаватора выполнен в виде последовательно соединен. ных датчика интенсивности потока горной массы на конвейере роторной стрелы и интегратора, причем выход. датчика является первым выходом блока, а выход интегратора - вторым.
5.Устройство по п. 1, о т л и ..ч а ю щ е е с я тем, что блок контроля изменения скорости поворота верхнего строения экскаватора, вьшолнен В виде последовательно соединенных датчика скорости поворота, дифференцирующего элемента и порогового элемента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| Устройство диагностики состояния рабочего органа роторного экскаватора | 1987 |
|
SU1479574A1 |
| Весодозировочное устройство для роторных экскаваторов | 1991 |
|
SU1816969A1 |
| Тренажер машиниста одноковшового экскаватора | 1986 |
|
SU1350659A1 |
| Устройство для учета времени работы роторного экскаватора | 1981 |
|
SU987051A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU876867A1 |
| УСТРОЙСТВО для КОНТРОЛЯ РЕЖИМА РАБОТЫ МАШИН | 1971 |
|
SU290993A1 |
| Автоматизированная система управления рабочим процессом роторного экскаватора | 1985 |
|
SU1703797A1 |
| Устройство для контроля и учета времени работы оборудования | 1985 |
|
SU1282177A1 |
| Устройство для управления фотоколориметрическим газоанализатором | 1982 |
|
SU1092468A1 |
1. УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И РАБОТЫ ДОБЫЧНОГО РОТОРНОГО : ЭКСКАВАТОРА в комплексе с двухбункерной самоходной погрузочной установкой, содержащее измеритель мощности привода роторного колеса, блок определения выработки экскаватора, блок измерения времени работы, интегратор, два коммутатора и два блока деления с индикаторами на выходе, о т л ич.а ю щ е е с я тем, что, с целью повышения достоверности и полноты контроля, оно снабжено двумя пороговыми элементами, третьим и четвертым коммутаторамиj вторым,третьим и четвертым интеграторами, вторым и третьим блоками измерения времени, третьим - одиннадцатым блоками деления третьим - одиннадцатым индикаторами и подключенными к 1входам блока измерения времени работы датчиком перемещения экскаватора, датчи- выдвижки дозирующих желобов бункеров, датчиками включения при- . водов конвейеров консоли, и стрелы, датчиками включения привода роторного колеса и привода поворота верхнего строения экскаватора и блоком контроля изменения скорости поворота верхнего строения экскаватора, причем выход измерителя мощности привода роторного колеса через второй, третий и четвертый коммутаторы соед1шен с входами соответственно второго, третьего и четвертого инте-: граторов, первый выход блока определения выработки экскаватора соединен с входами первого и второго порого- . вых элементов непосредственно и через первый коммутатор - с входом первого интегратора, а второй его (Л выход подключен к вторым входам шесс того, восьмого, девятого и одинпадцатого блоков деления, выход первого порогового элементе, соединен с управляющими входами первого и.второго ; коммутаторов и вторым входом второго блока измерения времени, первый 1 вход которого соединен С первым , 4 СП входом третьего блока измерения времени и вторым выходом блока измерения времени работы, а выход соеди00 нен с первыми входами первого и чето вертого и вторым входом третьего :блока деления, выход второго порогового элемента соединен с управляющим в ,входом третьего коммутатора и вторым входом третьего блока измерения времени, выход которого соединен с-вторыми входами первого и вдорого и с первыми входа 1и шестого ,седьмо.го блоков деления, выход первого интегратора соединен с первым входом третьего и вторым входом пятого бло
Изобретение, отвисится к автоматизации горнотранспортных машин для открытых горных работ в области KOHT-J роля и учета работы экскаваторов.
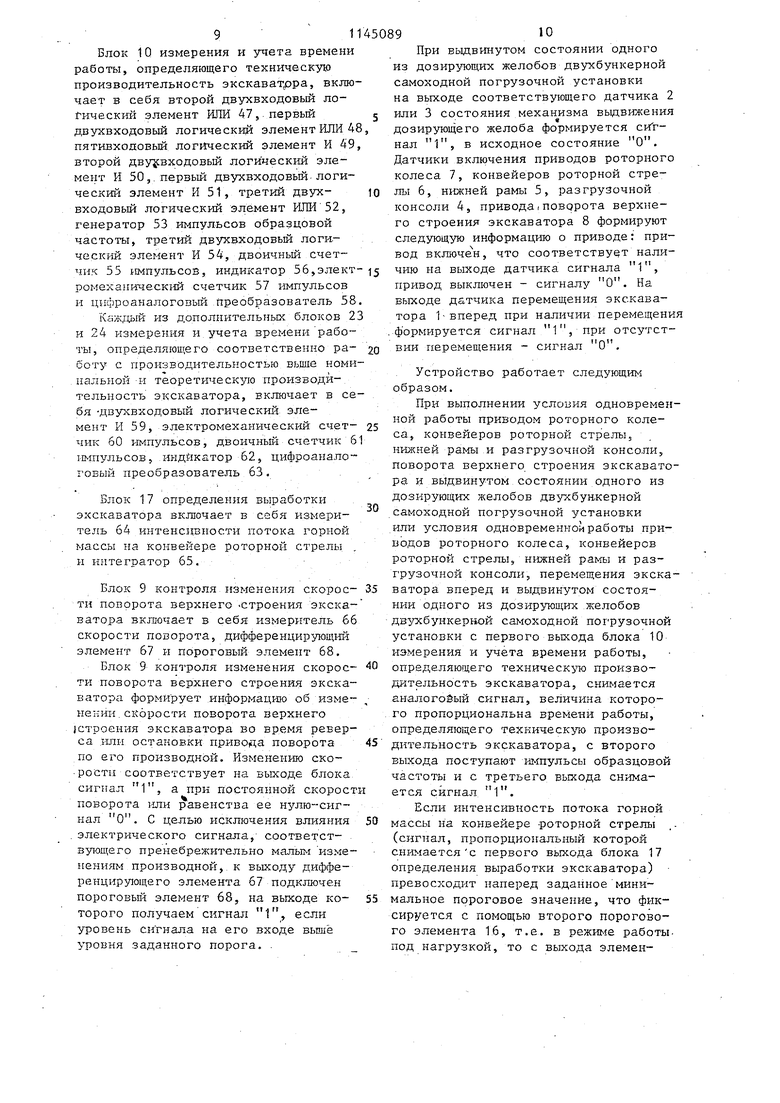
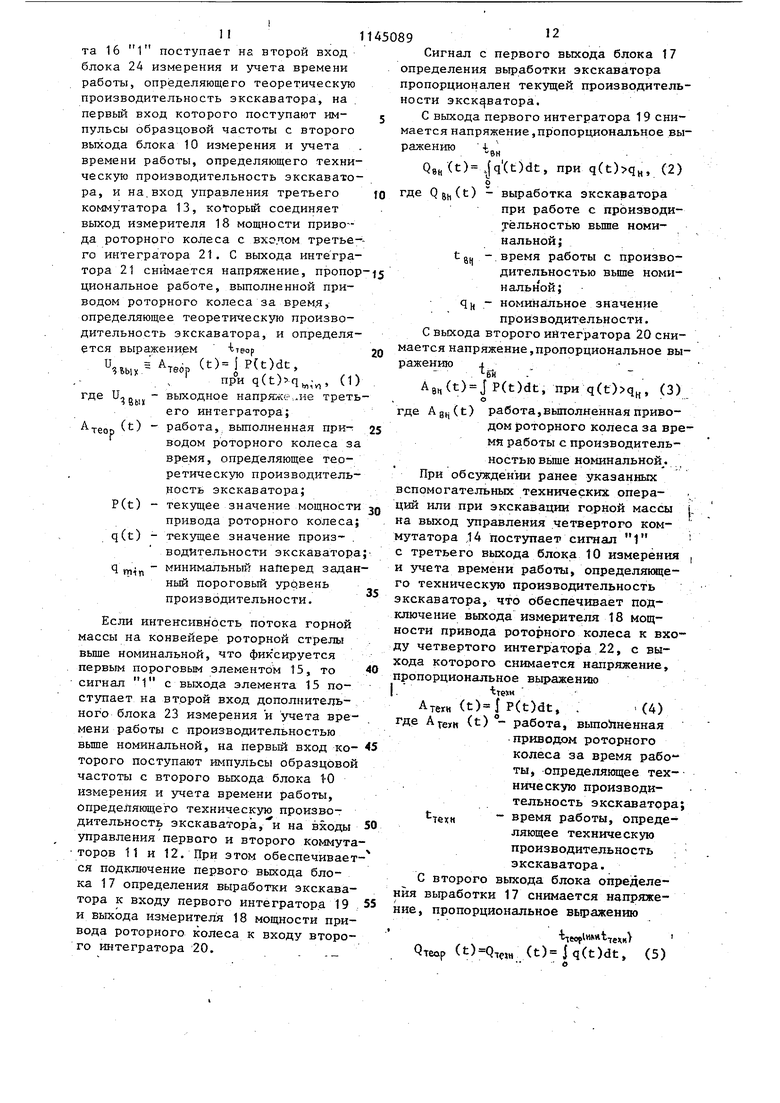
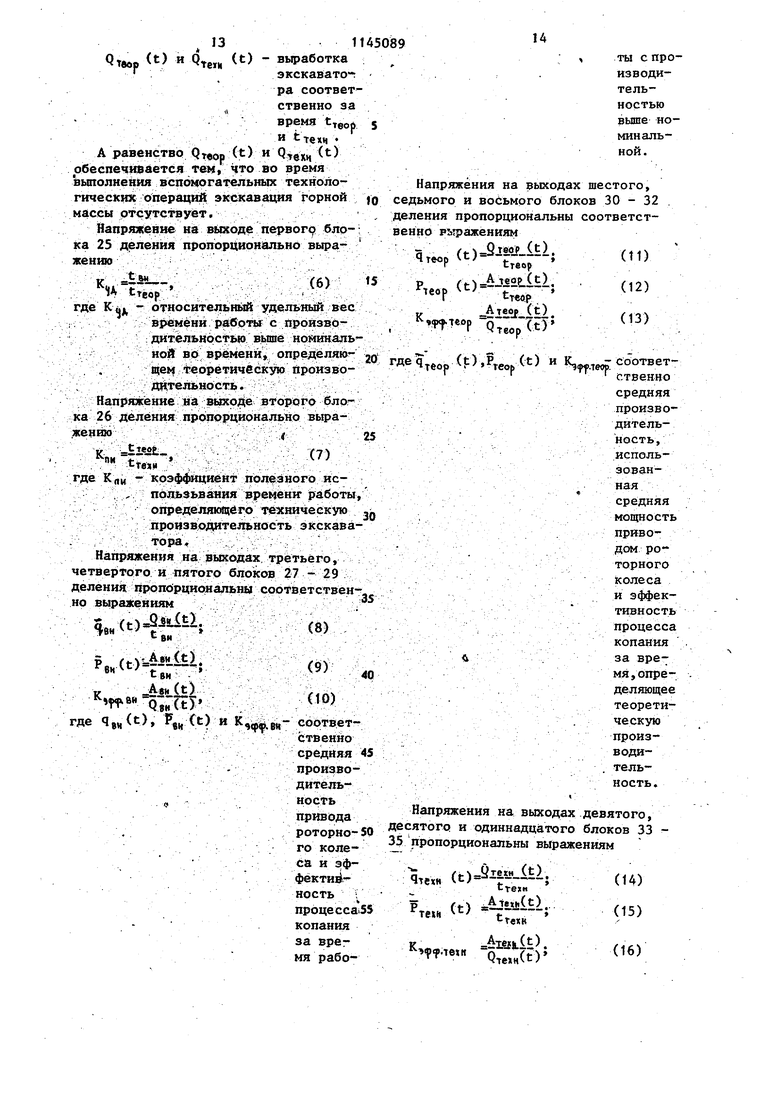
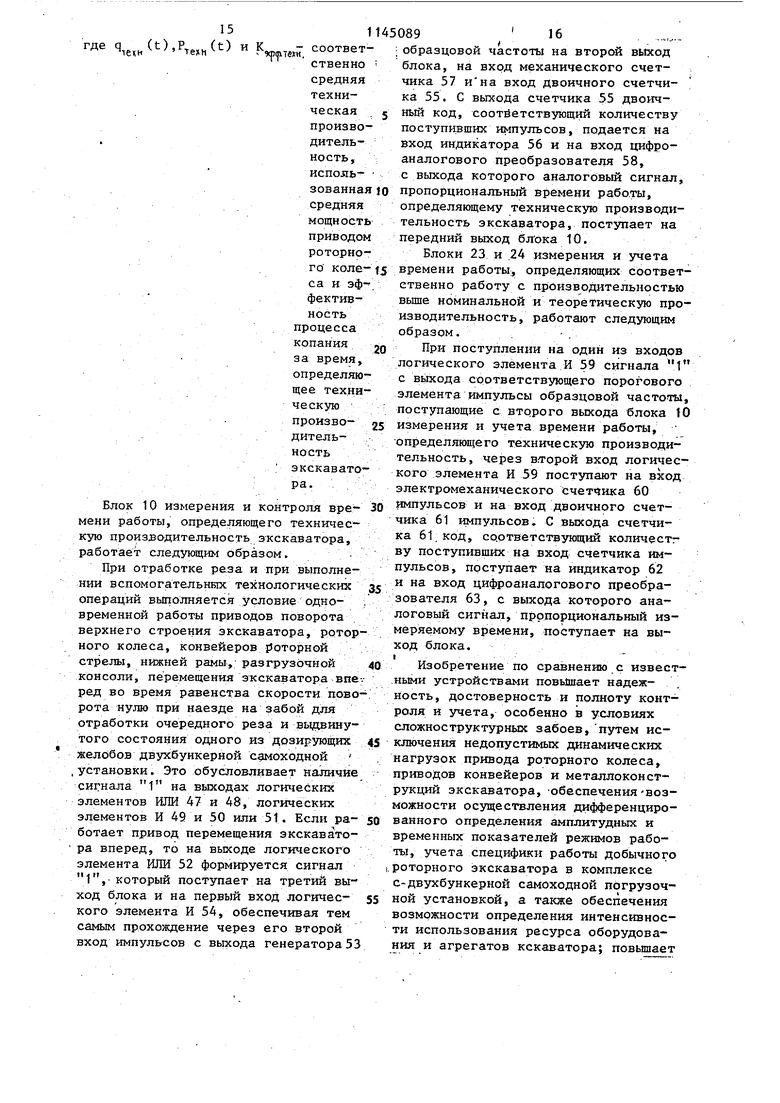
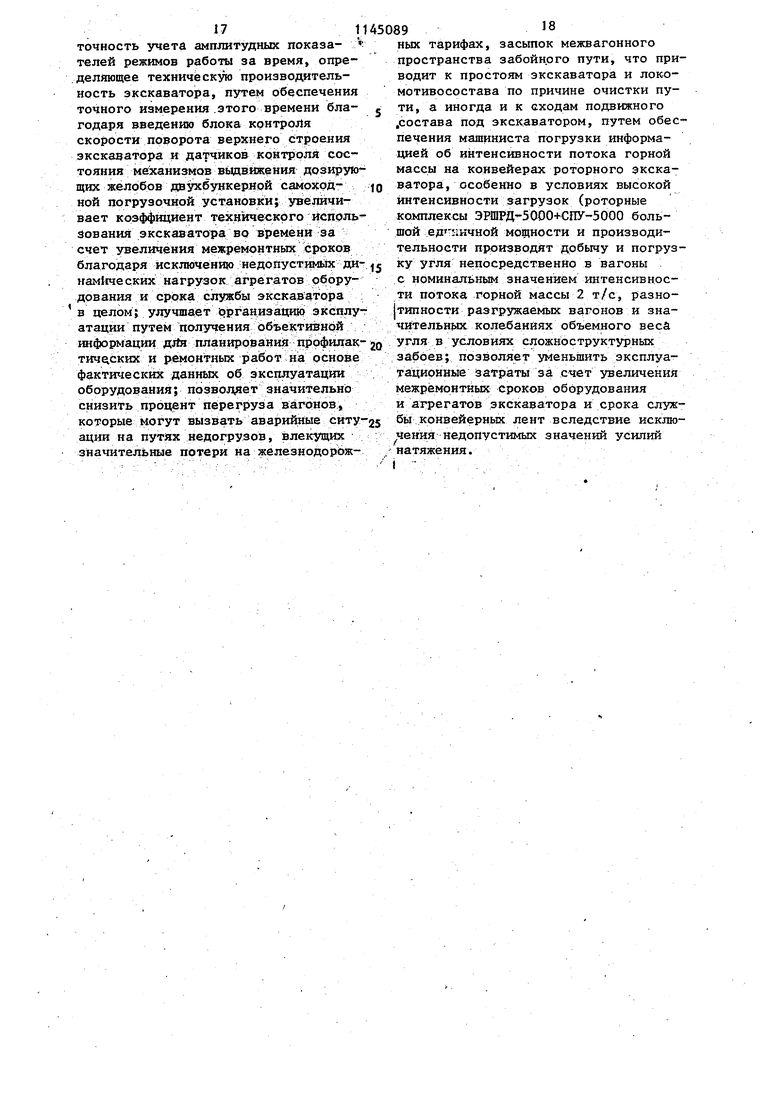
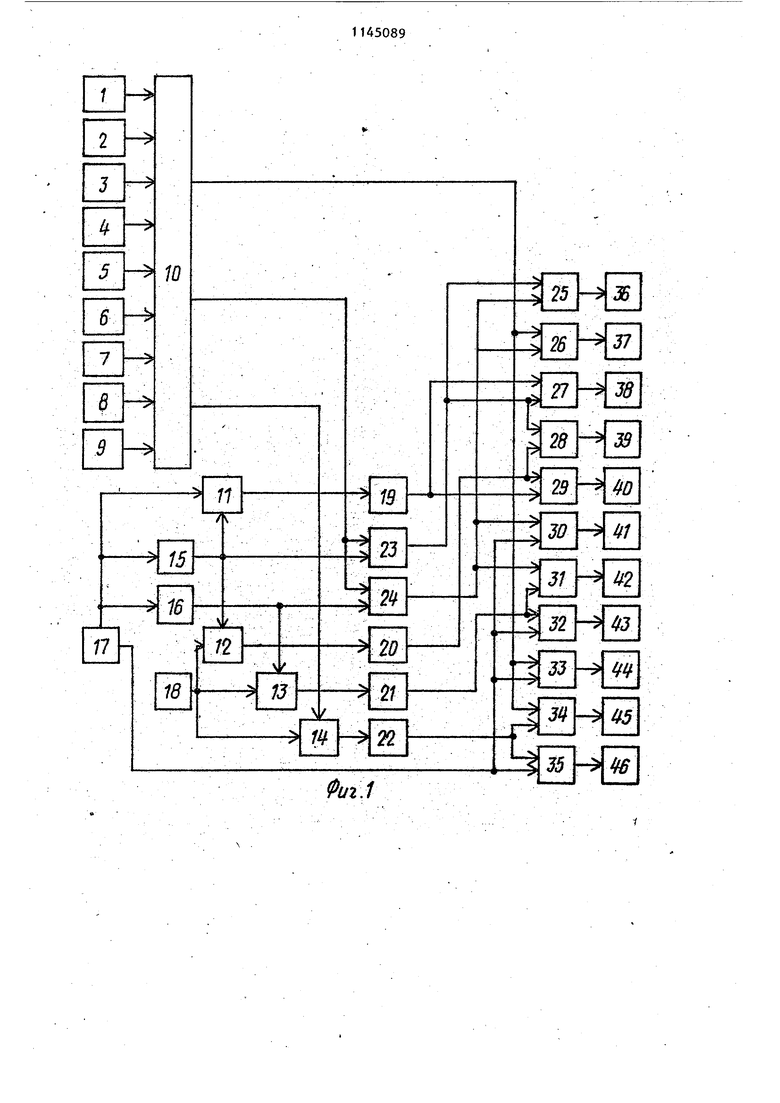
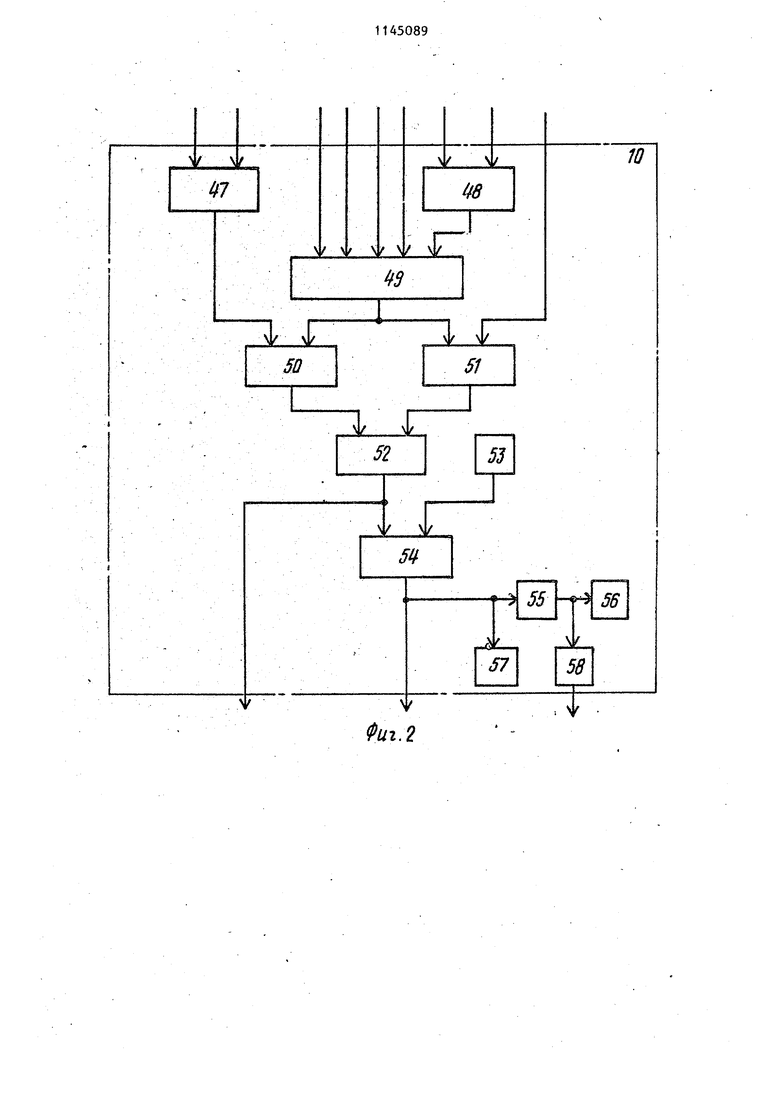
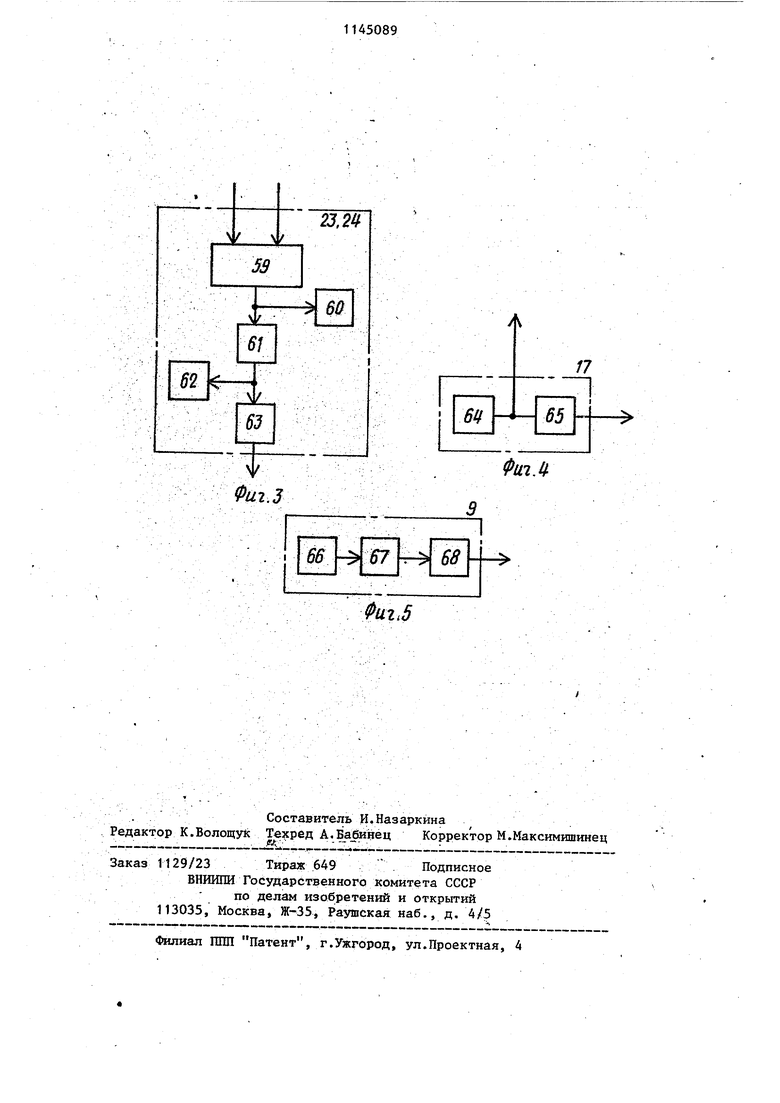
Известно устройство телеавтоматического контроля и учета работы рассредоточенных землеройных машин с одномоторным приводом, содержащее измеритель мощности, усилитель, инвертор, схему совпадения, к одному из входов которой подключен выход триггера, элемент задержки, счетчик, блок кодирования и передачи информации, соединенный с блркрм приема информации, накопители времени работы под нагрузкой и времени холостого хода, накопитель времени простоя, блок анализа информации, блок сравнения, блок задания уровня и датчик поворота, соединенный через элемент задержки и усилитель с вторым входом совпадения, выход которой подклпочен к счетчику, соединённому выхо Дом с входом блока кодирования и передачи информации, а измеритель мощности: через усилитель соединен с одним из входов блока сравнения, второй вход которого подключен тс блоку задания уровня, а выход соединен с входом инвертора и с одним из входов триггера, соединенного вторым входом с выходом инвертора, причем вход блока анализа информации подкл чен к вьрсоду блока приема информации а выход - к входам накопителей време ни работы под нагрузкой, времени холостого хода и времени простоя fQ Данное устройство применительно к добычному роторному экскаватору . в комплексе с двухбункернойсамоходной погрузочной установкой, однако оно не обеспечивает определения амплитудных характеристик различных режимов работы экскаватора. , Известно устройство для контроля работы экскаватора, содержащее измеритель мощности привода роторного колеса, блок определения-выработки экскаватора, блок измерения и учета времени работы, интегратор, два коммутатора и два блока деления с индикаторами на выходе, датчик оборотов, датчик момента на валу двигателя, датчики качения и перемещения грунта, ключевые элементы, сумматор, причем входы второго блока деления соединены с датчиком времени копания и сумматором, к входу которого через два последовательно соединенных клю чевьгх: элемента подключены датчик времени копания и оборотов двигателя 2f. Недостатками известного устройства являются низкая достоверность и малая полнота контроля, так как обес печивается лишь определение испол зованной средней мощности приводом роторного колеса и эффективности процесса копания только за время работы, определяющее техническую производительность экскаватора, и не обеспечивается дифференцированное определение амплитуды и временных характеристик режимов работы экскаватора. Кроме того, не., обеспечивается дифференцированное определение и вообще определение средних производи- тельностей за. время работы с производительностью выше номинальной, за время, определяющее теоретическую . производительность, и за время, определяющее техническую производительность экскаватора. Одни лишь амлитудные и временные-характеристики л режимов работы экскаватора, за время, определяющее техническую производительность, не дают необходимой и достоверной информации о режимах работы экскаватора, так как у штывают работу под нагрузкой и по выполнению вспомогательных технологических операций, а на величину динамических нагрузок, на износ оборудования и на интенсивность использования его ресурса основное влияние оказывает работа под нагрузкой и, кроме того, в информации о средних значениях амплитудных характеристик режимозв работы экскаватора за время, определяющее техническую производительность, не содержится прямой информации о выбросах параметров определяемых характеристик выше их номинальных значений и о длительности этих выбросов, которые Обуславливают возникновение недопустимых динамических нагрузок привода роторного колеса и металлоконструкций роторного экскаватора, приводящих к преждевременному износу основных агрегатов и выходу их из строя.г Цель изобретения - повыщение достоверности и полноты контроля и учета, особенно в условиях сложноструктурных забоев, путем исключения недопустимых дш a ичecк E: нагрузок привода роторного колеса и металло-. конструкций экскаватора, обеспечения возможности дифференцированного опреде-ления амплитудных и временньк показателей режимов работы, учета специ- фики работы добьмного роторного эк- скаватора в коьшлексе с двухбункерной самоходной погрузочной установкой, а также обеспечения возможности определения интенсивности использования ресурса оборудования экскаватораЭта цель достигаете тем, что устройство для контроля и учета рабо ть1 добычного роторного экскаватора в комплексе с двухбункернойсамоходной погрузочной установкой, содержащее измеритель Мощности привода роторного колеса, блок определения выработки экскаватора, блок измерения .времени работы, интегратор, два коммутатора и два блока деления снабжено двумя пороговыми элементами третьим и четвертым коммутаторами, вторым,, третьим и четвертым интегра- торамИз вторым и третьим блоками .измерения времени, третьим - одиннадцатым блоками деления, третьим одиннадцатым индикаторами и подключенными к.входам блока.измерения вр мени, работы датчиком перемещения экскаватора, датчиками, выдвижкй дозирующих желобов бункеров, .датчиками включен.ия приводов, конвейеров консоли, рамы и стрелы, датчиками: включения привода роторного колеса и привода поворота верхнего строения экскаватора и блоком контроля изменения скорости поворота верхнег строения экскаватора, причем выход измерителя мощности привода роторного колеса через второй, третий и четвертый коммутаторы ;соедш1ен: с входами соответственцо второго, третьего и четвертого интеграторов, первый выход определения выра ботки экскаватора соединен с входами первого и второго .пороговых. :Элементов непосредственного и через пе вый коммутатор - .с входом первого . интегратора, а второй.ёг.о выход под ключен: к вторым вх.одам шестого, восьмого, .девятого и одиннадцатого блоков деления,.выход первого порогового элемента соединен с управляю щргми входами первого и второго коммутаторов и вторым входом второго блока измерения времени, первый вход которого соединен с первым - входом. третьего блока измерения времени . и вторым выходом .блока измерения времени работы, а выход соединен с первыми входами Первого и четвертого и вторым входом третьего блока деления, выход второго порогового элемента соединен с управляющш.{ входом третьего коммутатора и вторым входом т ретьего блока измерения времени,, выход которого срединен с вторыми входами первого и второго и с первыми входами щестого и седьмого блоков деления, вькод первого интегратора соединен с первым входом третьего и вторым входом пятого блока деления, выход второго интегратора соединен с вторым входом четвертого и первым входом пятого блока деления, выход третьего интегратора соединел с вторым входом седьмого и первым входом восьмого блока деления, выход четвертого интегратора соединен с вторым входом десятого и первым входом одиннадцатого блока деления, первый выход блока измерения времени работы соединен с первыми-входами второго, девятого и десятого блоков деления, а третий-выход . блока измерения времени работы соединен с управляющим входом четвертого коммутатора, причем выходы всех блоков деления соединены с соответствующими индикаторами. Блок измерения времени работы состоит из трех элементов ИЛИ, пятив.ходового элемента И, трех элементов И, генератора импуль.сов, двоичного счетчика, индикатора, электромеханического счетчика и цифроаналогового преобразователя, причем второй вход первого элемента И является первым .входом блока, первый.и второй входы первого элемента ИЛИ являются соответственно вторым и третьим.входами блока, второй, третий, четвертый и пятый входы пятивходового элемен-, та V являются соответственно четвертым, пятым, пгестым и седьмым входами блока, а первьй и второй входы второго элемента ШШ являются соответст. венно и -девятым входами блока измерения времени работы, при этом вьгход первого элемелта.ИЛИ соединен с первым входом пят1шходового элемента И, вькод которого подключен к первому входу первого элемента И и первому входу второго элемента И, вторрй вход которого соединен с выхо-. дом второго элемента ИЛИ, а вйход с вторым входом третьего элемен- . та ИЛИ, первый вход которого соединен с выходом первого элемента И, а выход соедршен с третьим выходом блока и первым входом третьего элемента И выход генератора импульсов соединен с вторым входом третьего элемента И,, выход которого соединен с вторым выходом блока и входами двоичного и электромеханического счетчиков, выход двоичного счетчика соединен с входом индикатора и через цифроаналоговый преобразователь соединен с первым выходом блока измерения времени работа. Каждый дополнительный блок измерения времени состоит из индикатора;j .электромеханического счетчика и последовательно соёди1ненных элемента И двоичного счетчика и цифроаналогового преобразователя, вьпсод которого соединен с выходом блока, индикатор соединен с выходом двоичного счетчика, а электромеханический счетчик - с выходом элемента И, входы которого являются входами дополнительного блГо ка измерения времени работы. ; Блок определения выработ-си экскаватора выполнен в виде последователь но соедиренных датчика интенсивности потока горной массы на конвейере . роторной стрелы и интегратора, причем выход датчика является первым . выходом блока, а выход интегратора - БЛОК контроля изменения скорости, поворота верхнего строения экскаватора вьшолнен в виде последовательно соединенных датчика скорости пово рота, дифференцирующего элемента и .порогового элемента. На фиг. i приведена структурная схема устройства; на фиг. 2 - структурная схема блока измерения, времени работы, определяющего техническую, производительность экскаватора; на фиг. 3 - структурная дополнительного блока измерения времени, : определяющего соответственно теоретическую производительность или рабо ту с производительностью вьше номинальной: на фиг. 4 - структурная схема блока определения выработки экскаватора; на фиг. 5 - структурная схема блока контроля изменения скорости поворота верхнего строения . экскаватора. Устройство для контроля и учета работы добычного роторного экскавато ра, включает в себя датчик 1 перемедения экскаватора вперед, датчики 2 и 3 ввдвижки дозирующих желобов бун: керов, датчик 4 включения привода конвейера разгрузочной консоли, 5 включения привода конвейера It 98 нижней рамы, датчик 6 включения привода конвейера роторной стрелы, датчик 7 включения привода роторного колеса, датчик 8 включения привода поворота верхнего строения зкскаватора, блок 9 контроля изменения скорости поворота верхнего строения экскаватора, блок 10 измерения вре|4ени работы, определяющий технкческую производительность роторного экскаватора, соответственно с первого по четвертый коммутаторы 11 - 14, первый и второй пороговые элементы 15 и 16, блок 17 определения выработки экскаватора, измеритель 18 мощности привода роторного колеса, соответственно с первого по четвертый интеграторы 19 - 22, второй блок 23 измерения времени работы с производительностью выше номинальной, третий блок 24 измерения времени работы, определяющий теоретическую производительность экскаватора, соответственно с первого по одиннадцатый блоки деления 25-35, первый индикатор: 36 относительного удельного веса времени работы с производительностью выше номинальной во времени рабрты, определяющей теоретическую производительность экскаватора второй индикатор 37 коэффициента полезного использования времени работы, определяющего техническую про.из- ji водительность экскаватора, третий 38 средней производительНости за время работы с. производительностью выше номинальной, четвертый индикатор 39 и спользованной средней мощности приводом роторного колёса и пятый индикатор 40 эффективности процесса копания за время работы с производительностью выше номинальной, шестой индикатор 41 средней теоретической производительности, седьмой индикатор 42 использованной средней мощности-приводом роторного колеса и восьмой индикатор,43 эффекТивности процесса копания за время работы, определяющее теоретическую . производительность экскаватора, девлтый индикатор 44 средней технической производительности, десятый индикатор 45 использованной средней мощно сти приводом роторного колеса и одиннадцатый индикатор 46 зффективности процесса копания за время, определякщее техническую пр.оизводитетаность экскаватора. Блок 10 измерения и учета времени работы, определяющего техническую производительность экскаватрра, вклю чает в себя второй двухвходовьш логический элемент ИЛИ 47,. первый двухвходовый логический элемент ИЛИ 4 пятивхоповый логический элемент И 49 второй двухвходовый логический элемент И 50,, первый двухвходовый. логический элемент И 51, третий двухвходовый логический элемент ИЛИ52, генератор 53 импульсов образцовой частоты, третий двухвходовьш логи.ческий элемент И 54, двоичный счетчик 55 импульсов, индикатор 56,элект ромеханигческий счетчик 57 импульсов и цнфроаналоговый {треобразователь 58 Кажда1й из дополнительных блоков 2 и 24 измерения и учета времениработы, определяющего соответственно работу с производительностью вьцие номи нальной и теоретическую производительность экскаватора, включает в се бя -двухвходовый логический элемент И 59, электромеханический счетчик 60 импульсов, двоичный счетчик 6 импульсов, индикатор 62, цифроанало™ говый преобразователь 63. . Блок 17 определения выработки экскаватора включает в себя измеритель 64 интенсивности потока горной массы на конвейере роторной стрелы и интегратор 65. Блок 9 контроля изменения скороети поворота верхнего -строения экскаватора включает в себя измеритель 66 скорости поворота, дифференцирующий элемент 67 и пороговый элемент 68. Блок 9 контроля изменения скороети поворота верхнего строения экскаватора формирует информацию об изменении, скорости поворота верхнего )строения экскаватора во время реверса или остановки привода поворота по его производной. Изменению ско.рости соответствует на выходе блока сигнал 1, а при постоянной скорост поворота нли равенства ее нулю-сигнал О. С целью исключения влияния , электрического сигнала, соответствующего пренебрежительно малым изменениям производной,, к выходу дифференцирующего элемента 67 подключен пороговый элемент 68, на выходе которого получаем сигнал 1, если уровень сигнала на его входе выше уровня заданного порога. , При выдвинутом состоянии одного из дозирующих желобов двухбункерной самоходной погрузочной установки на выходе соответствующего датчика 2 или 3 состояния механизма выдвижения дозирующего желоба формируется сигнал 1, в исходное состояние О. Датчики включения приводов роторного колеса 7, конвейеров роторной стрелы 6, нижней рамы 5, разгрузочной консоли 4, привода.поворота верхнего строения экскаватора 8 формируют следующую информацию о приводе: привод включе н, что соответствует наличию на выходе датчика сигнала 1, привод выключен - сигналу О. На выходе датчика перемещения экскаватора 1-вперед при наличии перемещения формируется сигнал 1, при отсутствии перемещения - сигнал О. Устройство работает следующим образом. При выполнении условия одновременной работы приводом роторного колеса, конвейеров роторной стрелыj нижней рамы и разгрузочной консоли, поворота верхнего строения экскаватора и выдвинутом состоянии одного из дозирующих желобов двухбункерной самоходной погрузочной установки или условия одновременной работы приводов роторного колеса, конвейеров роторной стрелы, нижней рамы и разгрузочной консоли, перемещения экскаватора вперед и выдвинутом состоянии одного из дозирутощих желобов двухбункерной самоходной погрузочной установки с первого выхода блока 10 измерения и учета времени работы, определяю,щего техническую производительность экскаватора, снимается аналогоёый сигнал, величина которого пропорциональна времени работы, определяющего техническ то производительность экскаватора, с второго выхода поступают импульсы образцовой частоты и с третьего выхода снимается сигнал 1. Если интенсивность потока горной массы на конвейере роторной стрелы . (сигнал, пропорциональный которой снимаетсяс первого выхода блока 17 определения выработки экскаватора) превосходит наперед заданное минимальное пороговое значение, что фиксируется с помощью второго порогового элемента 16, т.е. в peKm-se работыпод нагрузкой, то с выхода элемента 16 1 поступает на второй вход блока 24 измерения и учета времени работы, определяющего теоретическую производительность экскаватора, на . первый вход которого поступают импульсы образцовой частоты с второго выхода блока 10 измерения и учета времени работы, определяющего техническую производительность экскаватора, и на.вход управления третьего коммутатора 13, коТорьй соединяет выход измерителя 18 мощности привода роторного колеса с входом третье-го интегратора 21. С выхода интегратора 21 сн™ается напряжение, пропор-|5 диональное работе, выполненной приводом роторного колеса за время, определяющее теоретическую производительность экскаватора, и определяется выра жением Ьтеор - Атеор (t)IP(t)dt, . q(t)M,-, (1) выходное напряже.ие третьего интегратора; работа, вьтолненная приводом роторного колеса за время, определяющее теоретическую производительность экскаватора; текущее значение мощности привода роторного колеса; текущее значение произ- . водительности экскаватора; fинимaльный наперед заданный пороговый производительности. Если интенсинность потока горной массы на конвейере роторной стрелы вьше номинальной, что фиксируется первым пороговым элементом 15, то 40 сигнал 1 с выхода элемента 15 поступает на второй вход дополнительного блока 23 измерения и учета времени работы с производительностью вьше номинальной, на первый вход ко- 45 торого поступают импульсы образцовой частоты с второго выхода блока ID измерения и учета времени работы, определяющего техническую производительность экскаватора,и на входы 50 управления первого и второго коммутаторов 11 и 12, При этом обеспечивает- ся подключение первого выхода блока 17 определения выработки экскаватора к входу первого интегратора 19 55 и выхода измерителя 18 мощности привода роторного колеса к входу второго интегратора 20. оп пр но ма ра гд ма ра вс ци ка му с и го эк кл но ду хо пр I. гд ни ни Сигнал с первого выхода блока 17 еделения вьфаботки экскаватора порционален текущей производительти экскаватора. С выхода первого интегратора 19 снится напряжение,пропорциональное выению . вн р8„и) .q(t)dt, при q(t)qH, о Qj,,(t) - выработка экскаватора при работе с производительностью вьше номинальной; .время работы с производительностью выше номинальной;номинальное значен 1е производительности. С выхода второго интегратора 20 снится напряжение,пропорциональное выению 4 -Bll . 84(t) Jp(t)dt, при q(t)q, (3) работа,зьтолненная приводом роторного колеса за время работы с производительностью выше номинальной. При обсуждении ранее указанных омогательных технических операили при экскавации горной массы j, выход управления четвертого коматора ,14 поступает сигнал 1 ретьего выхода блока 10 измерения , чета времени работы, определякнцетехническую производительность каватора, что обеспечивает подчение выхода измерителя 18 мощти привода роторного колеса к вхочетвертого интегратора 22, с выа которого снимается напряжение, порциональное выражению Атегн (t)| P(t)dt, . 44) (t) - работа, выпо11ненная приводом роторного колеса за время рабо ты, определяющее тех-ническую производительность экскаватора; время работы, определяющее техническую производительность экскаватора. С второго выхода блока определевьфаботки 17 снимается напряже, пропорциональное вьфажению tteofl« t-,enii Qteop (fc)QTCJH.. (t) jq(t)dt, (5) 131 Qreep t и Qtein выработка экскавато-г pa соответ ственно за время и ttexH А равенство QteopCt) и Q,gx(t) обеспечдаается тем, Что во время выполнеййя вспомогательных технологических операций экскавация горной массы отсутствует. Напряжение на выходе первог блоka 25 деления пропорционально выражению /, . .;.: . . -. V .tto.. ::, .. ЧЛ treop где К ц. - относительный удельный вес Ч времени работы с производительностью вьше номиналь ной во времени определяющем теоретическую производительность . Напряжение на выходе второго блока 26 деления пропорционально выражению, j К ie2t« tTe,H где Кди коэффициент полезного ис. , польэьвания времени работы определяющего техническую производительность экскава тора, . . Напряжения на выходах, третьего, четвертого и пятого блоков 27 - 29 деления пропорциональны соответствен но выражениям S (й)51й1. тв« tgH к (t) где qe«(t). вИ ((Йр. соответ ственно средняя произво дительностьпривода роторного колеса и эффекти,ностьпроцесса копания за врег мя рабо, ты с про. изводительностьювыше номинальной. на выходах шестого, ьмого блоков 30 - 32 . циональны соответстям2S.ltl. treop -во (t) ;;,ob t) и К, - соответ . (Teati LI л с.твенно средняя производительность, использованнаясредняя мощность приводом роторногоколеса и эффективностьпроцесса копания за время, определяющеетеоретическуюпроизводительность. а выходах девятого, надцатого блоков 33 ьны выражениям ; «« ,«K ег.(ь). ei.H(t) и(),Р. J paiT«H. соответ ственно средняя техническаяпроизво дительность, использованнасредняя мощност приводо роторно го коле са и эф фективностьпроцесса копания за время, определяю щее техни ческую производительность экскавато : ра. . ; Блок 10 измерения и контроля вре- мени работы, определяющего техническую цроиззодительность экскаватора, работает следующим образом. При отработке раза и при выполнении вспомогательнгах технологических операций выполняется условие одновременной работы приводов поворота . верхнего строения экскаватора, ротор кого колеса, конвейеров роторной стрелы, нижней рамы,; разгрузочной консоли, перемещения экскаватора впе ред во время равенства скорости пово рота нулю при наезде на забой для отработки очередного реза и выдвинутого состояния одного из дозирующих желобов двухбункерной самоходной .установки. Это обусловливает наличие сигнала 1 на выходах логических элементов ИШ 47 и 48, логических элементов И 49 и 50 или 51. Если работает привод перемещения экскаватора вперед, то на выходе логического элемента ИЛИ 52 формируется сигнал 1,- который поступает на третий выход блока и на первый вход логического элемента И 54, обеспечивая тем самым прохождение через его второй вход импульсов с выхода генератора 53 89 образцовой частоты на второй выход блока, на вход механического счетчика 57 ина вход двоичного счетчика 55. С выхода счетчика 55 двоичный код, соотбетствующий количеству поступивших импульсов, подается на вход индикатора 56 и на вход цифроаналогового преобразователя 58, с выхода которого аналоговый сигнал, пропорциональный времени работы, определяющему техническую производительность экскаватора, поступает на передний выход бЛока 10. Блоки 23 и .24 измерения и учета времени работы, определяющих соответетвенно работу с производительностью выше номинальной и теоретическую производительность, работают следующим образомi , . При поступлении на один из входов логического элемента И 59 сигнала 1 с выхода соответствующего порогового элемента импульсы образцовой частоты, поступающие с второго выхода блока tO измерения и учета времени работы, определяюп его техническую производительность, через вл-орой вход логического элемента И 59 поступают на вход электромеханического счетчика 60 импульсов и на вход двоичного счетчика 61 импульсов. С выхода счетчика 61,код, соответствующий количеств ву поступивших на вход счетчика импульсов, поступает на индикатор 62 и на вход цифроа:налогового преобразователя 63, с выхода которого аналоговый сигнал, пропорциональный измеряемому времени, поступает на выход блока. I Изобретение по сравнению с извест.ными устройствами повышает надеж- . ность, достоверность и полноту контроля и учета, особенно в условиях сложноструктурных забоев,путем исключения недопустимых динамических нагрузок привода роторного колеса, приводов конвейеров и металлоконструкций экскаватора, обеспечения-возможности осуществления дифференцированного определения амплитудных и временных показателей режимов работы, учета специфики работы добычного роторного экскаватора в комплексе с-двз бункерной самоходной погрузочной установкой, а также обеспечения возможности определения интенсивности использования ресурса оборудования и агрегатов кскаватора; повышает
точность учета амплитудных показа- телей режимов работы за время, определяющее техническую производительность экскаватора, путем обеспечения точного измерения .этого времени благодаря введению блока крнтроЛя скорости поворота верхнего строения экскаватора и датчиков контроля состояния механизк1ов вьщвижения дозируЮщих желобов двухбункерной самоходной погрузочной установки; увеличивает коэффициент технического использования экскаватора во времени за счет увеличения межремонтных сроков благодаря йскхпочению недопустимых динам11че ских нагрузок агрегатов рборудрвания и срока службы экскаватора ; в целом; улучшает Ь1рганизации эксплуатации путем получения Ьб-ьективной информации дЛя планиррэанияпррфидактИче ских и ремонтных работ на рснове Фактических данных об эксплуатации оборудования; позвол йет значительно снизить процент перегруза ваг()нов, которые могут вызвать аварийные ситуации на путях недогрузов, влекущщс значительные потери на железнодорЬжных тарифах, засьток межвагонного пространства забойного пути, что приводит к простоям экскаватора и локомотивосостава по причине очистки пути, а иногда и к сходам подвижного .состава под экскаватором, путем обес печения машиниста погрузки информацией об интенсивности потока горной массы на конвейерах роторного экскаватора, особ(енно в условиях высокой интенсивности загрузок (роторные комплексы ЭРШРД-5000Н-СПУ-5000 большой ед:шчной мощности и производительноети производят добычу и погрузку угля непосредственно в вагоны с номинальным значением интенсивности потока горной массы 2 т/с, разно типности разгружаемых вагонов и значительных коле банйях объемного веса угля в условиях сложноструктурных забоев; позволяет уменьшить эксплуатациркные затраты за счет увеличения межрёмрнтнык сроков оборудования и агрегатов экскаватора и срока службы конвейерных лент вследствие исклюЧения недопустимых значений усилий натяжения. ..,-.
f f
W
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство телеавтоматического контроля и учета работы рассредоточенных землеройных машин с одномоторным приводом | 1976 |
|
SU658239A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
