Изобретение относится к автоматизации производственных процессов на открытых горных разработках, а именно к автоматизации рабочего процесса роторных экскаваторов,.работающих в условиях сложноструктурных забоев.
Цель изобретения - повышение производительности роторного экскаватора путем повышения точности и устойчивости управления при обеспечении работы экскаватора в заданных пределах режимов нагру- жения агрегатов и металлоконструкций.л
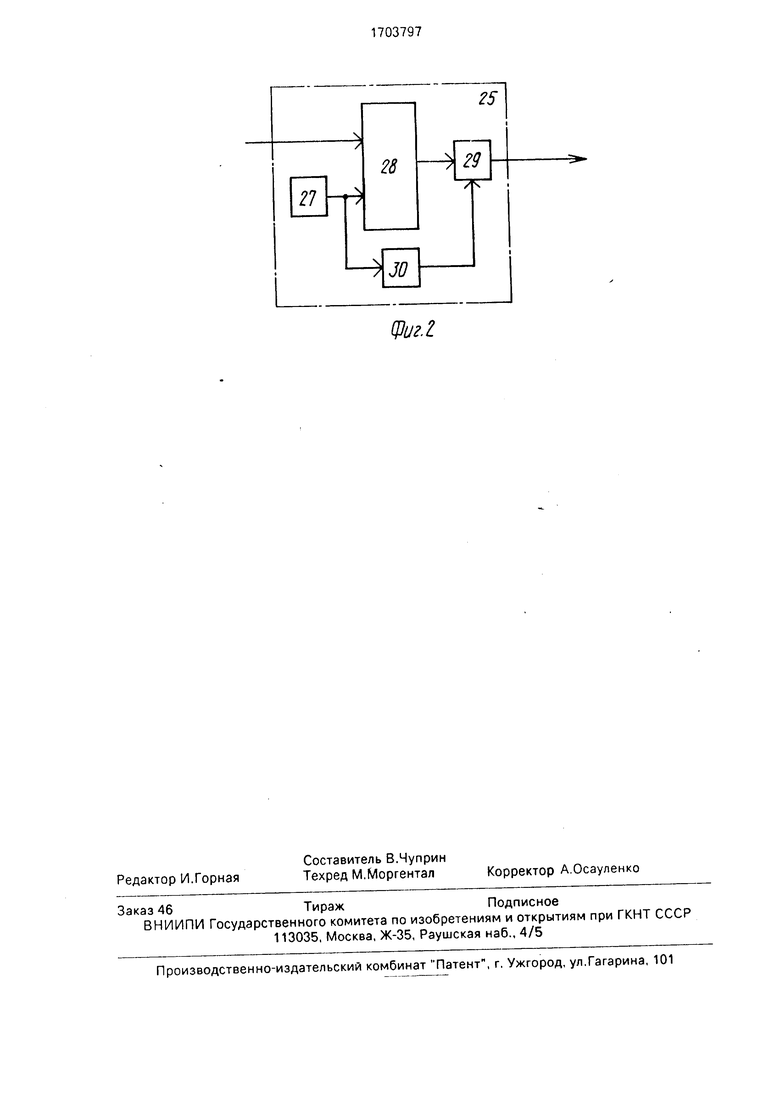
На фиг. 1 изображена структурная схема автоматизированной системы управления рабочим процессом роторного экскаватора; на фиг. 2 - пример выполнения блока определения косинуса угла поворота.
Автоматизированная система управления рабочим процессом роторного экскаватора включает датчик 1 высоты подуступа, датчик 2 толщины стружки, измерители нагрузки привода ротора 3, уровня вибраций металлоконструкции 4, производительности по массе 5, и нагрузки привода поворота 6, первый блок 7 умножения, первый 8, второй 9, третий 10 и четвертый 11 блоки установки масштабов, задатчик 12 объемной производительности, первый блок 13 деле-, ния, селектор 14 максимального сигнала, сглаживающий фильтр 15, датчик 16 скорости поворота, второй блок 17 деления, второй блок 18 умножения, эадатчик 19 максимального сигнала задания скорости поворота, пятый блок 20 установки масштаба, пороговый элемент 21, коммутатор 22, селектор 23 минимального сигнала, датчик 24 угла поворота, блок 25 определения косинуса угла поворота и третий блок 26 деления. Вход блока 25 определения косинуса угла поворота соединен с выходом датчика 24 угла поворота и выход соединен с первым входом третьего блока 26 деления, выход которого является выходом системы, и с первым входом второго блока 18 умножения, второй вход которого соединен с выходом датчика 16 скорости поворота и выход соединен с вторым входом второго блока 17 деления, первый вход которого соединен с выходом сглаживающего фильтра 15 и входом порогового элемента 21, а выход - с входом пятого блока 20 установки масштаба, выход которого соединен с первым информационным входом коммутатора 22, вход управления которого соединен с выходом порогового элемента 21 и выход соединен с первым входом селектора 23 минимального сигнала, второй вход которого с вторым информационным входом коммутатора 22 и выходом задатчика 19 максимального сигнала задания скорости
поворота, третий вход соединен с выходом первого блока 13 деления, второй вход которого соединен с выходом задатчика 12 объемной производительности и первый
вход соединен с выходом первого блока 7 умножения, первый вход которого соединен с выходом датчика 1 высоты подступа и второй вход соединен с выходом датчика 2 толщины стружки, выход селектора 23 мини- мального сигнала соединен с вторым входом третьего блока 26 деления, а выходы измерителей 3-6 соответственно нагрузки привода ротора, уровня вибраций, производительности по массе и нагрузки привода
поворота через блоки 8-11 установки масштабов соединены соответственно с первым- четвертым входами селектора 14 максимального сигнала, выход которого соединен с входом сглаживающего фильтра
15.
Блок 25 определения косинуса угла поворота включает генератор 27 импульсов, модуль 28 постоянной памяти, выходной запоминающий элемент 29 и элемент 30 задержки. Адресный вход модуля 28 постоянной памяти является входом блока, вход считывания соединен с выходом генератора 27 импульсов и входом элемента 30 задержки, выход которого соединен с входом записи выходного запоминающего элемента 29, информационный вход которогс соединен с выходом модуля 28 постоянное памяти и выход является выходом блока. Автоматизированная система управле
ния рабочим процессом роторного экскава тора работает следующим образом.
Сигналы с выходов датчиков 1 и 2. прс порциональные соответственно высоте по; уступа hny и толщине стружки Ьс, поступаю
на входы блока 7 умножения, с выхода коте рого сигнал, пропорциональный произвел нию hny be, поступает на первый вход бло 13 деления, на второй вход которого пост пает сигнал с выхода задатчика 12 объемнс
производительности. На выходе блока деления формируется сигнал, пропорци нальный значению скорости поворота, о ределяемой выражением
чЗ
Vn
q3
ny
Кг
(D
q$
где Vn - значение скорости поворо при котором обеспечивается номинала объемная производительность;
QVH - номинальное значение объем1 производительности роторного экскава ра;
Кр- коэффициент разрыхления экскг руемого ископаемого (КрЈ 1).
Таким образом, величина сигнала задания с выхода задатчика 12 объемной производительности должна быть такой, чтобы
н
qv сигнал Xvn задания скорости поворота с
выхода блока 13 деления обеспечивал номинальное значение объемной производительности при любых hny и be в заданных диапазонах их изменения.
Сигналы с выходов измерителей 3-6 через блоки 8-11 установки масштабов в масштабах, выбранных по критерию равноинтенсивного воздействия на оборудование в соответствии с выражением
Ki ХГР К2 Н2 Кз xqm К4 Х,нп Хн , (2) где KL «2, Кз, К4 - масштабные коэффициенты;н н н
Xip.XB ,Xqm , Х|П -сигналы на выходах измерителей 3-6 соответственно нагрузки привода ротора, уровня вибраций, производительности по массе и нагрузки привода поворота,
(соответствующие номинальным значениям измеряемых параметров, поступают соответственно на первый-четвертый входы селектора 14 максимального сигнала, на выходе которого формируется сигнал, определяемый выражением, , XmaxW - MAX KiXip(t), K2XB(t), «3 Xq,.
K«Xin(t)J,(3) который затем поступает на вход сглаживающего фильтра 15, с выхода которого сигнал, определяемый выражением
Xmax(t) 4 / ХМАХ (t ) Jt ,
t-r
(4)
где Т - скользящий интервал сглаживания, поступает на первый вход блока 17 деления, на второй вход которого поступает сигнал с выхода блока 18 умножения, на первый вход KOToporoJ поступает сигнал с выхода блока 25 определения косинуса угла поворота, на вход которого поступает сигнал с выхода датчика 24 угла поворота, и на второй вход блока 18 умножения поступает сигнал
Xvn(t) с выхода датчика 16 скорости поворота. На выходе блока 18 умножения формируется сигнал Xvn (t) , определяемый
выражением ,
Xvn( t) Xvn (t) cos , где f)n - угол поворота.
На выходе блока 17 деления ется сигнал
(6)
который масштабируется в блоке 20 в соответствии с выражением
(7)
10
(8)
(«).
где Ks - масштабный коэффициент;
Хмахн - номинальное значение сигнала на выходе сглаживающего фильтра 15, равное Хн.
Такое масштабирование осуществляется для того, чтобы при номинальной величине сигнала на выходе блока 15 сигнал задания скорости привода поворота с выхода блока 20 установки масштаба, сформированный в функции параметров Х|р (t), XB(t),Xqm (t) и Xin(t), был равен текущему значению сигна- 15 ла задания скорости поворота. Коэффициент Ks из формулы (7) равен Хн.
При работе роторного экскаватора по экскавации полезного ископаемого требуе треб-. мый сигнал Хуп (t) задания скорости
поворота в функциии параметров Xip (t) , Xs(t), Xqm(t)n Xin(t) определяется в соответствии с выражением
требYV (О
Xv «-К5Й|г
т.е. при XMax(t) XH сигнал Xvn (t) уменьшается относительно Xvn(t) на необходи- 30 МУЮ S. текущий момент времени величину, а при ХМах(т.)Хн увеличивается. Таким образом обеспечивается адаптация формируе треб
мого сигнала Xvn (t) к текущему
35 значению сигнала (0 задания скорости поворота.
Сигнал с выхода блока 20 установки масштаба поступает на первый информационный вход коммутатора 22, на второй ин40 формационный вход которого поступает сигнал Хупмах - соответствующий максимально допустимому сигналу задания скорости поворота, с выхода задатчика 19. На вход управления коммутатора 22 поступает
45 сигнал с выхода порогового элемента 21, порог срабатывания которого равен Хн. Если величина сигнала XMax(t), поступающего на вход порогового элемента 21 с выхода сглаживающего фильтра 15, меньше Хн, то
50 сигнал на его выходе равен О, и на выход коммутатора 22 проходит сигнал ХуПМах При Хмах(т) Хн срабатывает пороговый элемент 21, и сигнал Г с его выхода, поступающий на вход управления коммутатора 22, обеспечивает прохождение на его выход
треб
сигнала Xvn (t) с выхода блока 20 установки масштаба.
QVH
Сигналы Xvn с выхода блока 13 деления, Xvnmax с выхода задатчика 19 и
нал I Xvnmax или Xvn (t)j с выхода коммутатора 22 поступают на соответствующие входы селектора 23 минимального сигнала, с выхода которого сигнал, определяемый выражением
н
mmqv Xvn (t) т Л Xvn , Xvn мах При
Хмах ( t) Хн(9)
или выражением
mlnqf
Xvn (t) min Xvn , Xvn max ,
тре6- XVn , ПриХмах ( t ) XH t (Ю)
01)
поступает на второй вход третьего блока 26 деления, на первый вход которого поступает сигнал, соответствующий косинусу угла поворота п, с выхода блока 25 определения косинуса угла поворота. На выходе блока 26 деления формируется итоговый сигнал задания скорости поворота, определяемый выражением
min
итог
XVn W COSpn скорректированный по косинусу угла поворота для компенсации серповидности реза. Если ни один из параметров Х|р (t) , Xe(t), Xqm (t) и Xin (t) не является критичным в текущий момент времени, т.е. в качестве сигнала задания скорости поворота использунqv4v
ется сигнал Xvn при Xvn max Xvn обеспечивается номинальная объемная производительность. Как только ХМах(т) ста- новится больше Хн, в качестве сигнала задания скорости поворота используется сигнал
треб
Xvn . Сигнал Xvn мах является ограничивающим и величина его равна максималь- но возможному сигналу задания скорости поворота для автоматизируемого типа экскаватора.
Таким образом, система позволяет автоматически формировать наиболее рацио- нальный сигнал задания скорости поворота.
Блок 25 определения косинуса угла поворота работает следующим образом.
На вход блока поступает двоичный код, пропорциональный текущему значению уг- ла поворота, являющийся кодом адреса ячейки памяти модуля 28 постоянной памяти, в которой записано значение косинуса , яо угла. При поступлении импульсов с выхода генератора 27 импульсов на вход
5Ю
15
г 25
3Q 3540
4550
55
считывания модуля 28 постоянной памяти код, пропорциональный косинусу угла поворота, с выхода модуля 28 поступает на вход выходного запоминающего элемента 29 и записывается в него импульсом с выхода элемента 30 задержки, на вход которого поступают импульсы с выхода генератора 27 импульсов. Время задержки равно приблизительно 2 мкс (время необходимое для ус- тановления на выходе модуля 28 считываемого кода). Элемент задержки задержки задерживает только фронт поступа- ющего на его вход импульса. Срезы входного и выходного импульсов совпадают во времени.
Если система реализована на цифровых блоках, то выходной запоминающий элемент 29 представляет собой регистр с параллельной записью информации. Если система реализована на аналоговых блоках, то выходной запоминающий элемент представляет собой последовательно соединенные регистр с параллельной записью информации и цифроаналоговый преобразователь.
Аналоговый вариант системы может быть реализован на базе субблоков комплекса КМ2201 (СУПС), серийно выпускаемого ПО Точэлектроприбор (г. Киев) (блоки установки масштабов - Ф5173, селекторы максимального и минимального сигнала - Ф5196, блоки деления и умножения - Ф5178, сглаживающий фильтр - Ф5197). В качестве коммутатора можно использовать микросхему К561КП1, представляющую собой мультиплексор аналоговых сигналов,
В качестве модуля постоянной памяти, входящего в состав блока 25 определения косинуса угла поворота, можно использо вать микросхемы К573РФ2 или К1601РР1 с организацией 2КХ8, т.е. содержащих по 2048 8-разрядных ячеек памяти и являющихся энергонезависимыми (сохранение информации при отсутствии питающего напряжения).
Использование автоматизированной системы управления рабочим процессом роторного экскаватора обеспечит повышение производительности роторного экскаватора путем повышения точности и устойчивости управления при обеспечении работы экскаватора в заданных пределах режимов нагружения агрегатов и металлоконструкций в конкретных горно-геологиче- ских условиях с часто меняющимися физико-механическими свойствами забоя по ходу отработки реза, повышение надежности и долговечности основных узлов экскаватора, увеличение коэффициента технического использования роторного экскаватора во времени за счет уменьшения простоев, связанных с авариями или выходом за строя отдельных наиболее важных узлов экскаватора, вызванных частыми отклонениями параметров, характеризующих интенсивность нагружения оборудования, за допустимые пределы, исключение субъективного влияния оператора-машиниста роторного экскаватора на процесс экскавации.
Формула изобретения Автоматизированная система управления рабочим процессом роторного экскаватора, содержащая измерители нагрузки привода ротора, уровня вибраций металлоконструкций и производительности по массе, выходы которых соответственно через первый, второй и третий блоки установки масштабов подключены соответственно к первому, второму и третьему входам селектора максимального сигнала, выход которого соединен с входом сглаживающего фильтра, отличающаяся тем, что, с целью повышения производительности роторного экскаватора путем повышения точности и устойчивости управления при обеспечении работы экскаватора в заданных пределах режимов нагружения агрегатов и металлоконструкций, она дополнительно снабжена датчиком высоты подуступа, датчиком толщины стружки, датчиком скорости поворота, датчиком угла поворота, задатчиком объемной производительности, измерителем нагрузки привода поворота, первым и вторым блоками умножения, первым, вторым и третьим блоками деления, четвертым и пятым узлами установки масштабов, коммутатором, задатчиком максимального сигнала задания скорости поворота, селектором минимального сигнала, блоком определения косинуса угла поворота, вход которого соединен с выходом датчика угла поворота, а выход соединен с первым входом третьего блока деления и с первым входом второго блока умножения, второй вход которого соединен с выходом датчика скорости поворота, а выход соединен с вторым входом второго блока деления, первый вход которого соединен с выходом сглаживающего фильтра и с входом порогового элемента, выход второго блока деления соединен с
входом пятого блока установки масштаба, выход которого соединен с первым информационным входом коммутатора, вход управления которого соединен с выходом порогового элемента и выход соединен с
первым входом селектора минимального сигнала, второй вход последнего соединен с вторым информационным входом коммутатора и с выходом задатчика максимального сигнала задания скорости поворота.
причем выход датчика высоты подуступа соединен с первым входом первого блока умножения, второй вход которого соединен с выходом датчика толщины стружки, а выход первого блока умножения соединен с первым входом первого блока деления, второй вход которого соединен с выходом задатчика объемной производительности, а выход -с входом третьего блока деления, выход которого является выходом системы, а выход измерителя нагрузки привода поворота через четвертый блок установки масштаба соединен с четвертым входом селектора максимального сигнала.
28
-
29
-
74 .
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| Способ задания скорости поворотного механизма роторного экскаватора | 1979 |
|
SU910942A1 |
| Устройство для автоматического управления роторным экскаватором | 1981 |
|
SU988987A1 |
| Устройство для автоматического управления роторным экскаватором | 1987 |
|
SU1434039A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU876867A1 |
| Способ управления процессом копания экскаватора-драглайна и устройство для его осуществления | 1989 |
|
SU1819949A1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| Траншейный роторный экскаватор | 2021 |
|
RU2772810C1 |
| Система автоматизированного управления роторным экскаватором | 1985 |
|
SU1266942A2 |
Изобретение относится к автоматизации производственных процессов на открытых горных разработках. Цель изобретения - повышение произ-сти роторного экскаватора путем повышения точности и устойчивости управления при обеспечении работы экскаватора в заданных пределах режимов нагружения агрегатов и металлоконструкций. Система содержит измерители нагрузки привода 3 ротора, уровня 4 вибраций металлоконструкций и произв-сти 5 по массе, выходы которых через блоки установки масштабов (БУМ) 8-10 подключены к входам селектора 14 максимального сигнала. Выход селектора 14 подключен к входу сглаживающего фильтра 15. Дополнительно система снабжена датчиками (Д) высоты 1 подуступа, толщины 2 стружки, скорости 16 поворота и угла 24 поворота, задатчиком 12 произв-сти, измерителем 6 нагрузки привода поворота, блоками 7, 18 умножения, блоками 13, 17, 26 деления, двумя БУМ 11, 20, коммутатором 22, задатчиком 19 максимального сигнала задания скорости поворота, селектором 23 минимального сигнала, блоком 25 определения косинуса угла поворота и пороговым элементом 21. Сигналы с Д 1 и 2 поступают на блок 7. с выхода которого сигнал, пропорциональный произведению, поступает на вход блока 13, на второй вход которого поступает сигнал с задатчика 12. Выходной сигнал блока 13, пропорциональный скорости поворота, поступает на один из входов селектора 23, на другой вход которого поступает сигнал с задатчика 19. С выхода селектора 23 сигнал поступает на один вход блока 26. Сигналы с выходов измерителей 3-6 через БУМ 8-11 поступают на входы селектора 14, а его выхода через фильтр 15 - на входы порогового элемента 21 и блока 17. 2 ил. VI О Сд XI чэ XI 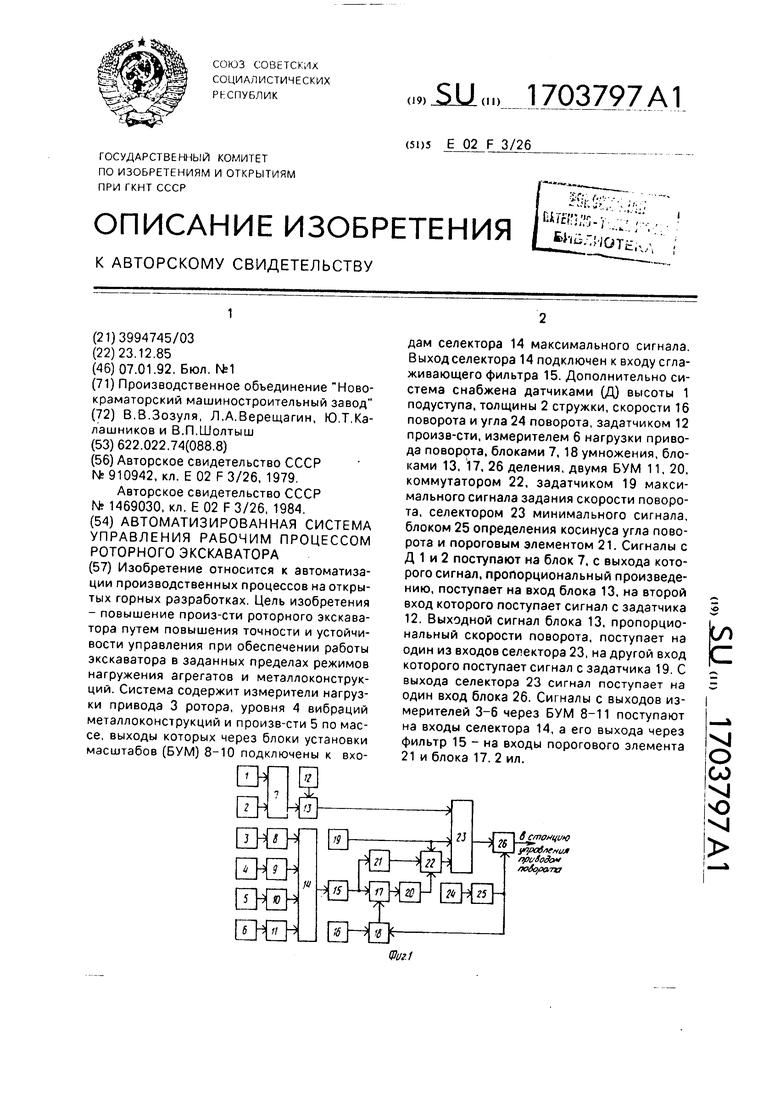
fcZ
| Способ задания скорости поворотного механизма роторного экскаватора | 1979 |
|
SU910942A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ формирования управляющего воздействия на привод поворота роторной стрелы роторного экскаватора и устройство для его осуществления | 1984 |
|
SU1469030A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
