Описываемый способ копирования с помощью трех следящих роликов по одному копиру, по сравнению с известными способамИ того же назначения, позволяет повысить производительность труда за счет обеспечения обработки поверхности при наименьшем БОЗЛЮЖНОМ количестве проходов - строчек.
Это достигается тем, что один ролик при движен-ии но копиру обеспечивает качание детали и копира, другой- одачу «па инструмент и «от инструмента, третий-синхронный поворот детали и копира. Таким образом, движение детали нод зшстру.ментом определяется одновременно тремя профилями одноло копира, а центры трех следящих (ощупывающих) роликов лежат на одтюи прямой, параллельной оси инструмента.
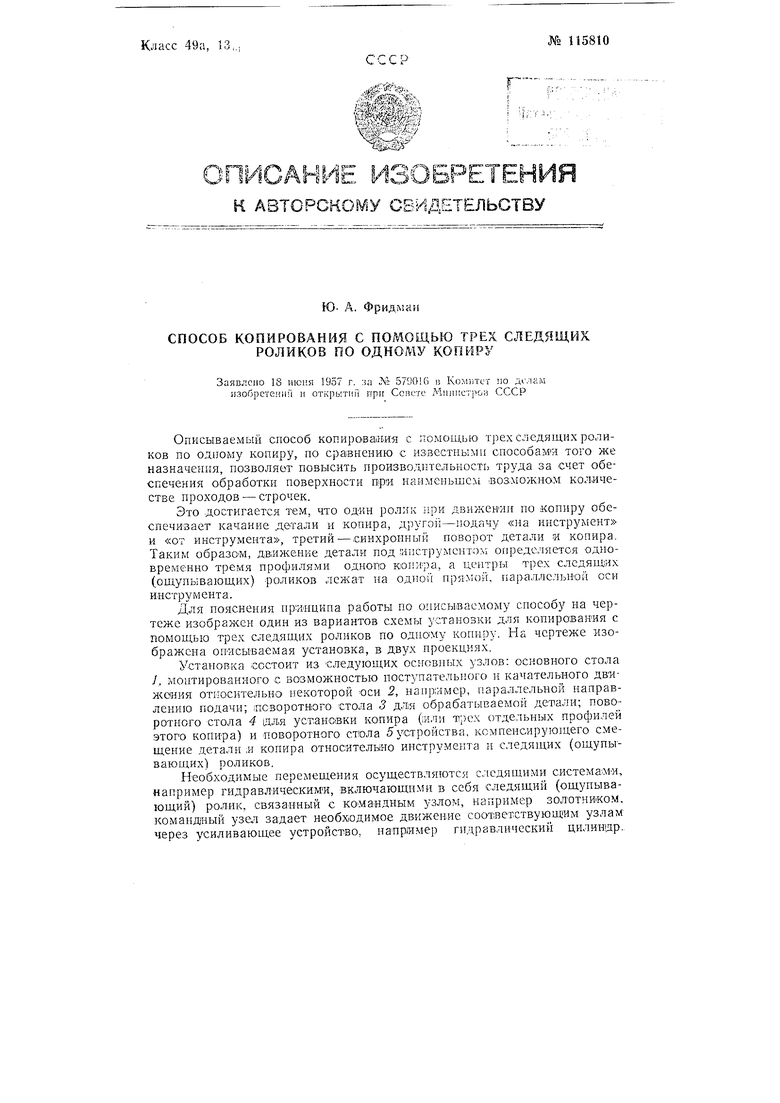
Для пояснения принципа работы но описываемому способу на чертеже изображен однн из вариантов схемы установки для копирования с помощью трех следящих роликов но одному копиру. На чертеже изображена описываемая установка, в двух проекциях.
Установка состоит из следующих основных узлов: основного стола 1, монтированного с возможностью поступательного н качательного двт жония относительно некоторой оси 2, напр; 1мер, параллельной направлению подачн; 1поворотного стола 3 для обрабатываемой детали; поворотного стола 4 ил,я установки копира (гили т:)ех отдельных профилей этого копира) и новоротного стола 5устройства, компенсирующего смещение детали .и копира относительно инструмента и следящих (ощупывающих) роликов.
Необходимые перемещения осуществляются следящими система;м-и, например гидравлическими, включающими в себя следящий (ощупывающий) ролик, связанный с командным узлом, например золотником, командный узел задает необХ|Одимое движение соответствую ниим узлам через усиливающее устройство, например гидравлический цилиндр.
№ 115810- 2 -
jla чертеже евязь е этими с.1едя1 шм;и еистемями хсловио обозначена стр-елка.ми.
Стрелка Б обознаЧх1ет евяз1 к следящей еистеме качания летали ;; копИра, стрелка В-- связь от уеиливаюшего уст 1онства этом системы; стрелка Г - к с.тедян ей С1мстеме подачи «на инструмеит и «от инст|)умента, стре.тка Д - от уси,:4иваюн1, устронства этоГ системы; Е - к следящей системе синх)о11|Ного поворота детали и копира; стрелка Ж - от усиливающего устройства этой системы.
Наиравление движений, комиенсирующих смещение детали и конир а, показано стрелкой И, а связь есисте. компеисании cMeiucHiiii----CTpe, Л .
Столы /1 4 и 5 монти ЮБаи1з1 на сто.ле /.
Поворотньн стол 4 копира 6 i-i ово)отный стол 5 ycTpoiicTBa, ком)енсн)уюи1.его смен1ен;ия, связи - ы со CTO.;IOM 3 об1)абатываем()Г| детали 7 так, что нрн повороте стола j на некоторый угол, столы 4 и 5 поворачиваются на тот же уго.л.
Поворот 1. сто. 3 С дета.)О 7 устанав.(г.гся под обрабатывающим ИМСтруме1ггом 8, поворотный стол 4 с К( 6 нод тремя с.чеДЯИ1ИМИ роликами Р. В П0, ожони:и командН1з1. устройствиент)ы 5ОЛИКОВ 9 .чежат на одной нрямой, 1ара.глельиой ocii обрабаты-ваюHJ.ero иистру.. В таком гюлс;Кеннн ролики являются как бы сечениями тела в)аи.е -1;;я (с.тсдящ; телол). Все три имеют ) диаметры, соответсапдоньме сечеии я инструмента |ДО.) иметь так1-1е же диамет|)ы. Крайние -из ро.1иков 9 евязамы ео следя иим; системами Б и / а средниГг ролик со следян1,ей еистемой Е.
Прел 1вкл 0чении подачи еледян1ие )олики 9 обкатываются io кониру. причем одни из крайних ро, нрн дн;ижении по копиру обеспечивает кача11ие детали н копира, другой крайний ролик - гюда у инструмент н «от Н1гтрумента, а среднип ролик---поворот дета.ти и коннра до тех по), пока , в-сех po. ;окажутс:5 на , нара.т.ле.пьиой инетрумепта. «С.тедящее тело сзюими тремя точками ие11рер шпо касается копира 6, а инструмент (S соответствую1 Шми 1местами об забатывает с()ответетвуюни:е места дета.л.и 7. Одновременно ново)ачИВается сто.т 5, на котором }ста и)в.1сна стойка с направ.1яюп;ей ыаикОЙ 10.
П р е д е т и з о б р е т е i и я
Снособ ко ГИрова Ия с OMonU)0 трех с.тедяигих J)O, -IKOB по одному коннру, от л и ч а ю HI и йс я тем, что, с целью повы нен:ия П1)оизводительности за счет обеснечения обработки -поверх ности при нанл1еньи ем возможном количеетве 1роходов-ет|1очек, один ролик нри движении но обеснеч:ивает качание дета.:п1 и копи)а, - подачу «на инструмент н «от ииструме 1та, третий-синхронный поворот детали и копира, благодаря чему дв-ижение детали под инструментом определяется одновременно тремя ггрофил чмя одного копира, а центры трех щунываю них 1оликов лежат па одно/ п 1ямой, нараллелг ной оси ипетрумента.