ot
00 Об
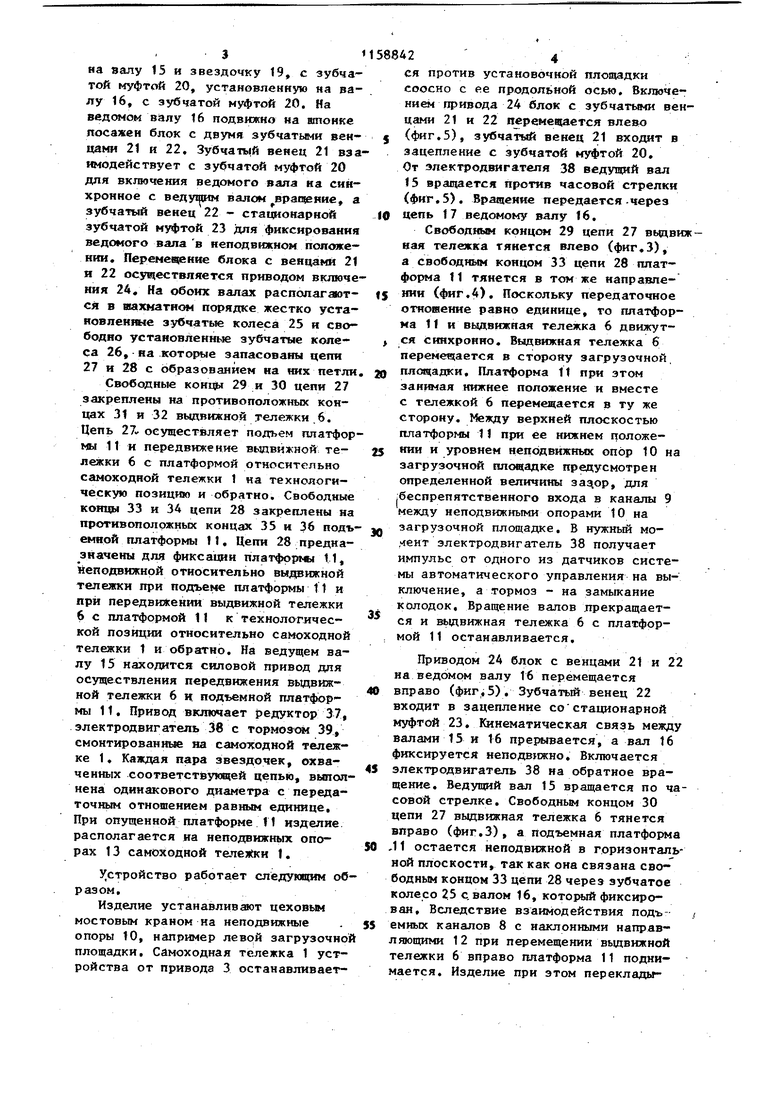
4 IS Изобретение относится к металлур гии и может быть использовано при загрузочно-разгрузочных операциях в камерных печах, а также в других областях народного хозяйства для загрузки-выгрузки крупногабаритных тяжельк изделий на технологические позиции и обратно. Известно загрузочно-разгрузочное устройство для камерных печей, выполненное в виде перемещающейся от привода тележки с подъемными при помощи другого привода консолькымя штангами для загрузки-выгрузки изделий из п&чи El Однако данное устройство пригодно только для загрузки-выгрузки не бол ыпих по весу и габаритам изделий. Наиболее близким по технической сухости и достигаемому результату является загрузочно-разгрузочное устройство ДГ1Я камерных печей, содержащее самоходную телеяйку, устано ленку на ней 9 1даижную тележку с Ьод%ем«ой платформой, которая опирается свшюет каткдаш на направлятойейе) Устр :йство мсякет осуществлять сшёрш)1ии загруэки-выгрузки крупногабафиятйш; тяжешах изделий в камериле печи и обратно, заиилает относи тельно иебольаую площадь в цеху t2 Однако вьщвижная тележка с подьемяой платфеормой мЪжет передвигаться только в одну сторояу от самоход ной тележки, поэтому камвркые печи Или яйые технологические позиции расставлякя-ея в один ряд, а занимаемую) в цеху для передвижения самоходжай теяежки нельзя исполоьзовать для дру1Ч1« технологических уящ, и она оказывается суй есtвенной ito срашежт с площадью, заш€tta&№o& вечами с Цель иэо15| €1рёйия - у версалькость устройсттза, Йвстгдалевиая цель достигается те что в загрузочйо-разгрузочиом устро стве, соде1 «и ем самоходную тележку установленшё на ней вь вижную тележку с подъемдами катками и с приводом, дяатфо1 |у с Приводом и с наклотшми направляющими, взаимодейст вующими с подъемны катками выдвиж ной тележки, платформа соединена с приводом вьщвигной тележки посред ством кинематической связи в виде установленньвс на самоходной тележке ведущего и ведомого валов с жестко закрепленными на каждом валу зубчатыми колесами, механизма фиксации ведомого Вала и свободно установленньк на валах зубчатых колес, при этом каждая пара разноименных колес охвачена цепью, одна ветвь цепи замкнута и взаимодействует с механизмом фиксации, а каждая последующая ветвь вьтолнена разомкнутой, свободные концы ее закреплены соответственно на торцах платформы и выдвижной тележки и расположены в разных плоскостях, а передаточное отношение пары- колес с замкнутой ветви цепи равно единице. На фиг,t изображено устройство; вид в плане; на фиг.2 - разрез А-А на фиг,1} на фиг,3 - разрез Б-Б на фиг,2} на фиг,4 - разрез В-В на фиг,2; на фиг,5 - кинематическая схема механизма для передвижения тележки и подъема платформы, Загрузочно-разгрузочное устройство содержит самоходную тележку 1, перемещаемую вдоль ряда технологиг ческого оборудования по рельсам 2 от привода 3,. ТелёЛжа t возможность пере,мещаться вдоль фронтов технологичес1ких позиций, расположенных в плане в дв:а Р9да, На самоходной тележке 1 закреплены поперечные рельсы 4, KOTOi i6 располагаются параллельно продольной оси каждой камерной печи или другой технологической позиции, в которых . уложены аналогичные рельсам 4 рельсы 5, На самоходной тележке 1 устанавливаются выдвижные тележки 6 с колесами 7 и подъемными катками 8, Рельсы 5 расположенные в каналах 9 между неподвижными опорами 10 на тпобой технологической . Подъемные катки 8 вьщвижной тележки 6 имеют подъемную платформу 11 с прикрепленньа и к ней наклонными направляющими 12, которые имеют горизонтальные участки. Кроме того, на самоходной тележке 1 смонтированы неподвижные опоры 13 для установки изделий, а также приводной механизм14 дпя передвижения выдвижной тележки 6 и подъема платформы 11, Механизм 14 вк/иочает закрепленные в опорах-ведущий 15 и ведомый 16 валы. Валы 15 и 16 связаны между собой посредством бесконечной цепи 17 охватывающей звездочку 18, жестко установленную 3 на валу 15 и звездочку 19, с зубчатой муфтой 20, установленную на валу 16, с зубчатой муфтой 20. На ведомом валу 16 подвижно на атонке посажен блок с двумя зубчатыми венцами 21 и 22. Зубцать1й венец 21 вза имодействует с зубчатой муфтой 20 для включения ведомого вала на синхронное с ведущим валом , а зубчатый венец 22 - стационарной зубчатой муфтой 23 для фиксирования ведомого валав неподвижном положении. Перемев ение блока с венцами 21 и 22 осуществляется приводом включе ния 2А, На обоих валах располагаются в шахматном порядке жестко установлен|&1е зубчатые колеса 25 и свободно установленные зубчатые колеса 26, на которые запасованы цепи 27 и 28 с образованием на них петли Свободные концы 29 и 30 цепи 27 закреплены на противоположных концах 31 и 32 выдвижной тележки.6. Цепь 27- осуществляет подъем платфор мы 11 и передвижение вьщвйжной тележки 6 с платформой относительно самоходной тележки 1 на технологическую позицию и обратно. Свободные концы 33 и ЗА цепи 28 закреплены на противоположных концах 35 и 36 подъ емной платформы 11. Цепи 28 преднадначены для фиксации платформы 11, Неподвижной относительно выдвижной тележки при подъеме платформы 11 и при передвижении выдвижной тележки б с платформой 11 к технологической позиции относительно самоходной тележки 1 и обратно. На ведущем валу 15 нахо; 1тся силовой привод для осуществления передвижения вьздвижной тележки 6 к подъемной плат юрмы 11. Привод включает редуктор 37, злектродвигатель 38 с тормозе 39, смонтированные на самоходной тележке 1. Каждая пара звездочек, охваченнь х соответствующей цепью, выполнена одинакового диаметра с передаточным отношением равным единице. При опущенной платформе 11 изделие, располагается иа неподвижных опорах 13 самоходной телеяеки 1. Устройство работает следующим образом. Изделие устанавливают цеховьм мостовым краном на неподвижные опоры 10, например левой загрузочно площадки. Самоходная тележка 1 устройства от привода 3 остакавливает24ся против установочной площадки соосно с ее продольной осью. Включением привода 24 блок с зубчатыми венцами 21 и 22 перемещается влево (фиг.5), зубчатый венец 21 входит в зацепление с зубчатой муфтой 20. От электродвигателя 38 ведутосий вал 15 вращается против часовой стрелки (фиг.5). Вращение передается-через цепь 17 ведомому валу 16. Свобод1а 1м концом 29 цепи 27 вьдвижная тележка тянется влево (фиг.З), а свободным концом 33 цепи 28 платформа 11 тянется в том же направлеНИИ (фиг.А). Поскольку передаточное отношение равно единице, то платформа 11 и выдвижная тележка 6 движутся синхронно. Выдвижная тележка 6 перемещается в сторону загрузочной, площадки. Платформа 11 при этом занимая нижнее положение и вместе с тележкой 6 перемещается в ту же сторону. Между верхней плоскостью платформы 11 при ее нижнем положеНИИ и уровнем неподвижных опор 10 на загрузочной площадке предусмотрен определенной величины , для .беспрепятственного входа в каналы 9 между неподвижными опорами 10 на загрузочной площадке. В нужный момент злектродвигатель 38 получает импульс от одного из датчиков системы автоматического управления на выключение, а .тормоз - на замыкание колодок. Вращение валов лрекращается и вь|движная тележка 6 с платформой 11 останавливается. Приводом 2А бдок с венцами 21 и 22 на ведомом валу 16 перемещается вправо (фиг,5). Зубчатый венец 22 входит в зацепление состационарной муфтой 23. Кинематическая связь между валами 15 и 16 прерывается, а вал 16 фиксируется неподвижно. Включается электродвигатель 38 на обратное вращение. Ведущий вал 15 вращается по часовой стрелке. Свободньм концом 30 цепи 27 выдвижная тележка 6 тянется вправо (фиг.З), а подъемная платформа 11 остается неподвижной в горизонтальной плоскости, так как она связана свободным концом 33 цепи 28 через зубчатое колесо 25 с. валом 16, который фиксирован. Вследствие взаимодействия подъ . емных каналов 8 с наклонными направляющими 12 при перемещении выдвижной тележки 6 вправо платформа 11 поднимается. Изделие при этом переклады.вается с неподвижтпс опор ТО на пдйтформу 11. В крайнем верхнем положении платформа останавливается вьшлючением электродвигателя 38;, В поднятом положении платформы 11 катки 8 находятся под горизонтальным участкаtm направлякищпс 12, что исключает самопроизвольное перемйцение плат формы 11 относительно вьщвижной тележки 6 при освобождении вала 16 от устройства фиксации. Далее происходит загрузка изделия в печь. Приводом 24 блок с венцами 21 и 22 перемещается влево. Зубчатый венец 21 входит в зацепление с зубчатой муфтой 20, Ведокый вал 16 освобождается от устройства фиксации и устанавливается на кинематическую связь с ведущим валом 15. Затем включается электродвигатель 38 на враще- 4в ние по часовой стрелке Вращение его передается на вал. 15 и последний вращается в том же направлении, т,ё, по часовой стрелке. Своббдным концом 30 цепи 27 выдвижная т влeжкa тянется вправо, а свободным концом 34 цепи 28 платформа 11 тянется в том же направлении, С приподнятой йлат-г формой и размещенным на ней изделит бм выдвижная тележка 6 выезжает из каналов 9 на загрузочной площадке на самоходную тележку Самоходная тележка 1 с вьщвижной тележкой 6 и платформой 11 от привода 3, передвигаясь по рельсам, останавливает-, ся против одной из кзмер11ь6 печей сооено с ее продольной, осью Включением элekтpoдвиItaтeля 33 нд обратное : вращение ведущий рил 15 вращ аётся против часовой сфрелки, и выдвижная тележка 6 пере щается по репьсай 4 и 5 влево:в сторону камерирй печи. Платформа 11 с изделием, сохраняя При этом верхнее ноложенйе неремевдается вместе с вьщвижной f &sKoA В крайнем лев мпрлоокен-ии выдв1Шная тележка 6 рстанав тавается, Вклю чением привода 24 перемещается вправр бйрк с венцаш 21 и 22 до зацепления венца b 23, чем фиксирУf- : : ;,- , 11 26 ется ведомый вал 16, Платформа 11 также фиксируется, так как она имеет связь с валом 16, Включением ведущего вала 15 от электродвигателя 38 на вращение прет тйа часовой стрелки платформа 11 опускается, оставаясь неподвижной в горнзонтальной плоскости, а выдвижная тележка пербмёщается влево. Изделие при этом перекладьюается с платформы 11 на неподвижные; опоры 10 в печи и устанаготивается на них. При опуска НИИ платформы 11 подъемные катки 8 переходят с наклонного участка направлякяцйх 12 на их горизонтальный участок. Приводом 24 блок с венцами 21 и 22 п1еремещается влево до зацепления с зубчатой муфтой 20, Кинематическая связь между обоими валаМИ 15 И 16 восстанавливается и вал 16 вращается. Затем включением электродвигателя 38ведущий вал вращается пр часовой стрелке. Вращение его передается валу 16 и последний вращается в том же направлений. Выдвижная тележка 6 перемещается вместе с oityще.ннрй платформой 11 на самоходную тележку 1, т,е. возвращается в первРначальное положение, Предпагаеьаш устррйством можно транспортировать изделие также из одного ряда технологических позиций на другой, Этр осуществляется за несколько шагов, для чего на самоходной тележке смонтированы неподвижные опоры 13, Подъемная платформа 11 совершает путь по нескольким прямоугольным траектрриям с перекладыванием изделия из одногр ряда печей на неподвижные рпрры 13 самоходной тележки, а. оттуда на одну из технологических позиций второго ряда, Предпоженное загрузочно-разгрузочное устройство позволяет брлее рационально использовать производственные площади путем одновременного обслуживания двух рядов технологического оборудования,
yxxxxxj
ъ :э
В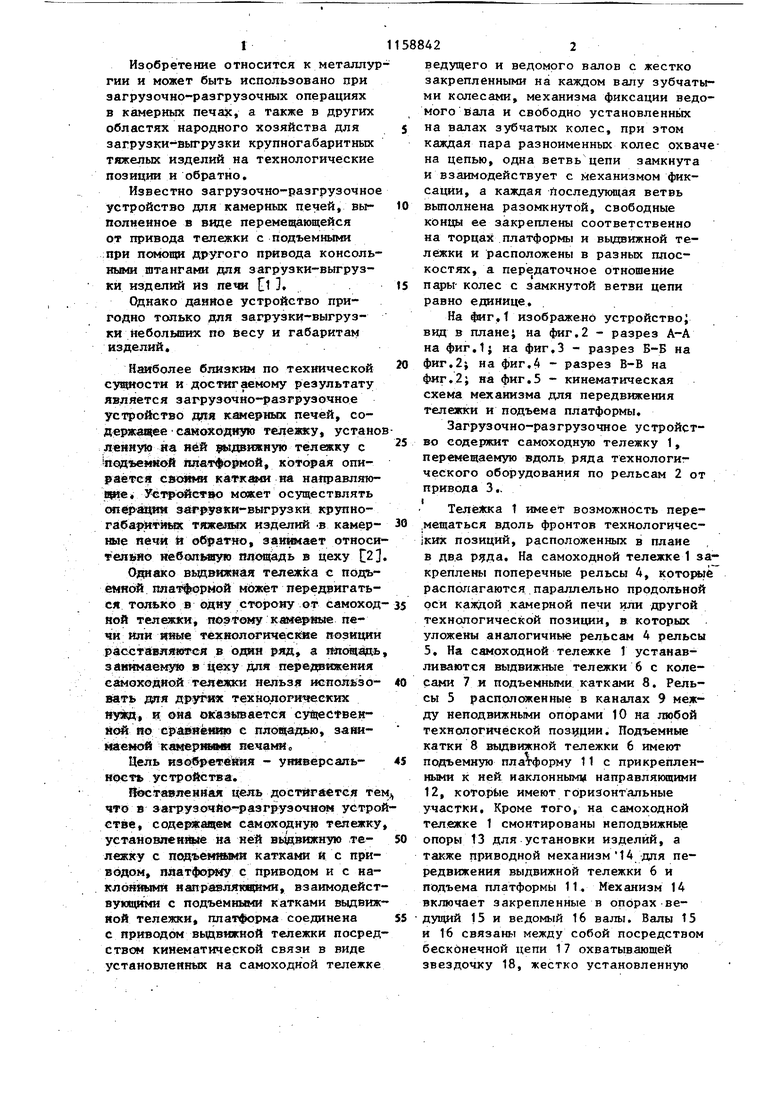

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки-выгрузки | 1981 |
|
SU960515A1 |
| Агрегат для термообработки изделий | 1981 |
|
SU1074910A1 |
| Передвижной рельсовый путь | 1976 |
|
SU699074A1 |
| МАНЕВРОВОЕ УСТРОЙСТВО ДЛЯ ВАГОНОВ | 2009 |
|
RU2405697C1 |
| Многоосное длиннобазное шасси | 2020 |
|
RU2743769C1 |
| Установка для формования изделий из арболита | 1981 |
|
SU1009771A1 |
| КРУГЛАЯ ВЯЗАЛЬНАЯ МАШИНА ДЛЯ ИЗГОТОВЛЕНИЯ ИЗДЕЛИЙ С НЕПРОВЯЗАННОЙ ОСНОВОЙ И С ПЕТЛЕОБРАЗУЮЩИМИ НИТЯМИ ПО ОБЕИМ СТОРОНАМ ОСНОВЫ | 1932 |
|
SU35104A1 |
| Устройство монтажа и демонтажа дискового питателя | 1983 |
|
SU1157335A1 |
| Шаговый конвейер | 1990 |
|
SU1787880A1 |
| МОБИЛЬНАЯ ЛЕБЕДКА | 2014 |
|
RU2552785C1 |




ЗАГРУЗОЧНО-РАЗГРУЗОЧНОЕ УСТРОЙСТВО, содержащее самоходную тележку, установленные на ней выдвижную тележку с подъемныьда катками и приводом, платформу с приводом подъема с наклонными направляющими, взаимодействующими с подъемньми катками выдвижной тележки, отличающееся тем, что, -. целью универсальности устройства. платформа соединена с приводом вьщвижной тележки посредством кинематической связи в виде установленных на самоходной тележке ведомого и ведущего валов с жестко закрепленными на каждом валу зубчг1тыми колесами, механизма фиксации ведомого вала и свободно установленных на валах зубчатых колес, при этом каждая пара разноименных колес охвачена цепью, одна ветвь цепи замкнута и взаимодействует с механизмом фиксации, а каждая последующая ветвь выполнена разомкнутой, свободные концы ее закреплены соответственно на торцах платформы и вьщвижной телеязси и расположены W в разнь1Х плоскостях, а передаточG ное отношение пары колес в замкнутой ветви цепи равно единице.
сриг. S
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Гаситель колебаний вращающегосяВАлА | 1979 |
|
SU815350A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для загрузки-выгрузки | 1981 |
|
SU960515A1 |
| Прибор с двумя призмами | 1917 |
|
SU27A1 |
