Изобретение относится к области измерений при сравнительных испытаниях транспортных средств.
Известноустройство для измерения буксования трактора, содержащее датчики оборотов ведущего и.ведомого колес, связанные со счетчиками оборотов, работающими в противофазе и связанными с регистратором l.
Недостатком этого устройства является то, что оно не позволяет производить измерение с достаточной точностью, поскольку ведомое колесо трактора деформируется и само может проскальзывать относительно грунта, попав в колею. ;
Известно также устройство для измерения буксования трактора, содер- жащее д атчик оборотов двигателя, датчик импульсов путеизмерительного колеса, связанные через преобразователи сигналов с регистратором и схемой управления Г23.
Однако в таком устройстве также не достигается достаточной .точности измерений параметров буксования, измерение и регистрация буксования производятся только на холостом ходу трактора без учета его рабочей загрузки.
.Цель изобретения - повьпиение точности измерения средних значений буксования.
Поставленная цель достигается тем, что в устройство для измерения буксования трактора,, содержащее датчик оборотов двигателя, датчик импульсов путеизмерительного колеса, связанные через преобразователи сигналов с регистратором и схемой управления, введены схема умножения частоты, к входу которой подключен датчик оборотов двигателя, реверсивный счетчик оборотов двигателя, счетный вход которого соединен с выходом схемы умножения частоты, а управляющий вход - с одним из выходовсхемы управления, и реверсивный счетчик импульсов путеизмерительного колеса, к счетному входу которого подключен датчик импульсов путеизмерительного колеса, к первому управляющему входу - второй выход схемы управления, к второму управляющему входу - выход счетчика оборотов двигателя, а выход реверсивного счетчика импульсов путеизмерительнбго колеса соединен с входом схемы управления.
На чертеже изображена блок-схема устройства для измерения буксования трактора.
Устройство для измерения буксования трактора содержит датчик 1 оборотов двигателя, схему 2 умножения частоты, реверсивный счетчик 3 импульсов оборотов двигателя, датчик 4 импульсов путеизмерительного колеса, реверсивный счетчик 5 импульсов путеизмерительного колеса, схему 6 управления .
Датчик 1 оборотов двигателя подключен к счетному входу реверсивного счетчика 3 через схему 2 умножения частоты, а датчик 4 импульсов путеизмерительного колеса - непосредст-. венно к счетчику 5. Схема 6 управления связана с управляющими входами счетчиков 3 и 5. Счетчик 3 подключен к второму управляющему входу счетчика 5, а выход счетчика связан со схемой 6 управления.
Измерение буксования производится на двух режимах работы трактора: |Под нагрузкой и на холостом ходу. При движении трактора под нагрузкой на зачетном участке (рекомендуемая длина 100 м) информация от датчика 1 оборотов двигателя через схему 2 умножения частоты поступает на )ревер сивный счетчик 3 импульсрв оборотов двигателя, который работает в режиме накопления. Одновременно с началом счетаимпульсов счетчиком 3 схема 6 управления дает разрешение реверсивному счетчику 5 импульсов путеизмерительного колеса на счет импульсов от датчика 4 импульсрв путеизмерительного колеса. При наборе реверсивным счетчиком 3 импульсов оборотов двигателя числа 10000 от него поступает сигнгщ запрета счета реверсивному счетчику 5 импульсрв измерительного колеса, который через схему 6 управления запрещает счет импульсов счетчиком 3. При этом счетчиком 5 зафиксируется произвольное число импульсов пути, пройденное трактором под нагрузкой (с наличием буксования) за 10000 импульсов оборотов двигателя..
При движении трактора на холостом ходу схема 6 управления включает счетчики 3 и 5 е режим вычитания чисел импульсов оборотов двигателя от датчика 1 и путеизмерительного колеса от датчика 4. Как только п счет31
чике 5 наступает разница, равная нулю j между произвольным числом импульсов пути трактора, зафиксированного в режиме работы трактора под нагрузкой, и количеством импульсов пути, зафиксированном в режиме работы на холостом ходу (длина зачетных участков для определения бусования трактора равна), то реверсивный счетчик 5 через схему 6 управления вьщает сигнал запрета счетчику 3 на вычитание импульсов оборотов двигателя при холостом ходе трактора из числа 10000 импульсов оборотов двигателя, зафиксированного в режиме работы трактора под нагрузкой. $аким образом, разностное число в счетчике 3 соответствует, буксованию трактора в цифровой форме, а при съеме этого числа оператором необходимо отделить две значащих цифры справа, что отражает буксование трактора непосредственно в процентрах без иромейсуточных вычислений.
Работу устройства поясняют на еледукяцем примере:
tr 2H::Ss.t.,79%, п„
где п„ 10000 - число импульсо в обороутов двигателя, зафиксированное в режиме
158935
. работы трактора под нагрузкой на произвольное число импульсов пути;
- число импульсов оборотов двигателя, зафиксированное в режиме работы трактора на холосЧ том ходу за то же произвольное число импульсов пути;
,79 - разностное число импульсов , пропорциональное буксованию, зафиксированное реверсивным счетчиком импульсов оборотов двигателя в режиме работы трактора на холостом ходу. Схема 2 умножения частоты предназначена для обеспечения накопления информации об оборотах двигателя в объеме 10000 единиц при проходе трактором под нагрузкой рекомендованной длины зачетного участка 100 м при различных рабочих скоростях.
Предлагаемое устройство позволяет непосредственно замерять то среднее значение буксования, которое создается от тяговой нагрузки на крюкетрактора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения буксования колесного трактора | 2023 |
|
RU2805892C1 |
| Устройство для определения буксования трактора | 1976 |
|
SU620893A1 |
| Устройство для контроля буксования трактора | 1986 |
|
SU1388922A1 |
| Устройство для определения буксования движителей транспортного средства | 1985 |
|
SU1255891A1 |
| Способ ограничения величины буксования | 2023 |
|
RU2815769C1 |
| Устройство для измерения буксования трактора | 1972 |
|
SU507799A1 |
| Цифровой ротационный вискозиметр | 1982 |
|
SU1105785A1 |
| Стабилизатор скорости движения транспортного средства | 1977 |
|
SU716886A1 |
| Устройство для измерения угла впрыска топлива | 1979 |
|
SU785674A1 |
| СИГНАЛИЗАТОР ТЕХНОЛОГИЧЕСКОЙ СКОРОСТИ МАШИННО-ТРАКТОРНОГО АГРЕГАТА | 2002 |
|
RU2219499C2 |
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ БУКСОВАНИЯ ТРАКТОРА, содержащее датчик оборотов двигателя, датчик им- v пульсов путеизмерительного колеса, связанные чере.з преобразователи сигналов с регистратором и схемой управления, отличающееся тем, что, с целью повьшения точности измерения средних значений буксования, в него введены схема умножения частоты, к входу которой подключен датчик оборотов двигателя, реверсивный счетчик оборотов двигателя, счетный вход которого соединен с выходом схемы умножения частоты, а управляющий вход - с одним из выходов схемы управления, и реверсивный счетчик Го1пульсов путеизмерительного колеса, к счетному входу которого подключен датчик импульсов путеизмерительного колеса, к первому управляющему вхо(Л ду - второй выход схемы управления, к второму управляющему входу - выход счетчика оборотов двигателя, а выход реверсивного счетчика импульсов путеизмерительного колеса соединен с входом схемы .управления. СП оо со 00 СП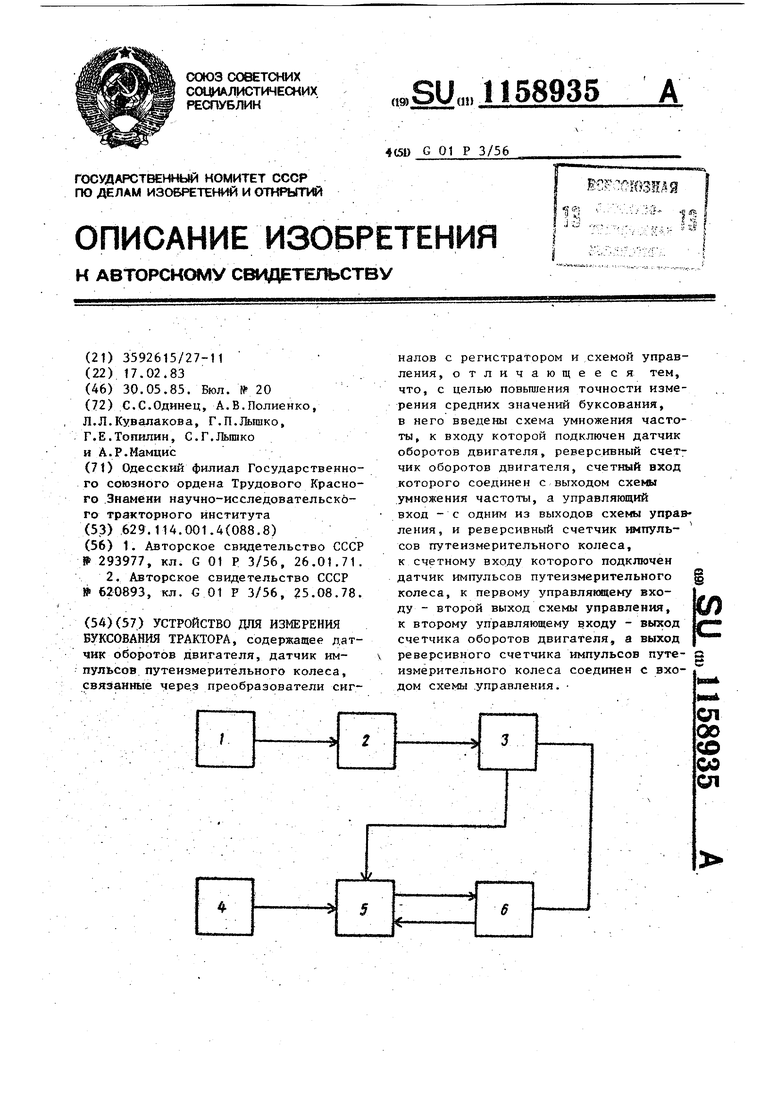
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для ИССЛЕДОВАНИЯ ВЗАИМОДЕЙСТВИЯ КОЛЕС | 0 |
|
SU293977A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для определения буксования трактора | 1976 |
|
SU620893A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
