1
Изобретение относится к подводным буксируемым устройствам, управляемым по глубине, преимущественно к технике дистанционного управления и стабилизации на заданной глубине буксируемых объектов, применяемых в сейсморазведке. При использовании буксируемых сейсмических кабелей применяются стабилизаторы, удерживающие их на заданной глубине.
Известны стабилизаторы глубины, в которых поддержание заданной глубины погружения буксируемого сейсмического кабеля обеспечивается автоматическим изменением гидродинамической силы несущей поверхности (руля) стабилизатора 1. В качестве автомата глубины используется гидростатический регулятор прямого действия. Горизонт буксировки задается изменением давления газа в рабочей камере гидростатического регулятора.
Известно также устройство, содержащее корпус с гидростатическим регулятором прямого действия, выполненным в виде воздущной камеры с мембраной, чувствительной к гидростатическому давлению и взаимодействующей с рулем глубины 2.
Для изменения глубины буксирования аппарата установлена система дистанционного автоматического управления глубиной погружения, состоящая из эластичного баллона с запасом газа под наружным давлением, соединенного клапаном с полостью воздущной камеры. Устройство, задающее глубину буксирования с дешифратором, и датчик глубины соединены с дискриминатором, который вырабатывает сигнал ощибки и с помощью усилителя мощности управляет электродвигателем, вал которого соединен с рулем глубины и клапаном. Электродвигатель открывает клапан и поворачивает руль, в результате чего аппарат меняет глубину и под действием изменяющегося гидростатического давления газ перетекает из эластичного баллона в воздущную камеру при погружении или всплытии. При достижении заданной глубины электродвигатель возвращает руль в горизонтальное положение и перекрывает клапан.
Недостатками известного устройства являются крайне малый диапазон задаваемых глубин и переменная с глубиной погружения плавучесть. Давление газа в эластичном баллоне равно атмосферному и, следовательно, при достижении глубины погружения в несколько метров весь газ переходит в рабочую камеру гидростата. Таким образом, с заглублением устройства уменьщается его объем при сохранении веса, т. е. уменьщается плавучесть.
Это отрицательно сказывается на качестве стабилизации при рабочих скоростях буксировки в пределах 1-4 м/сек, так как эффективность несущей плоскости (руля) зависит от ее размеров и от скорости набегающего потока.
Цель изобретения - расширение диапазона задаваемых глубин при сохранении постоянного значения плавучести стабилизатора.
Это достигается тем, что в предлагаемом стабилизаторе баллон с запасом сжатого газа выполнен жестким, а мембраны подпружинены, причем датчик давления установлен внутри воздущной камеры.
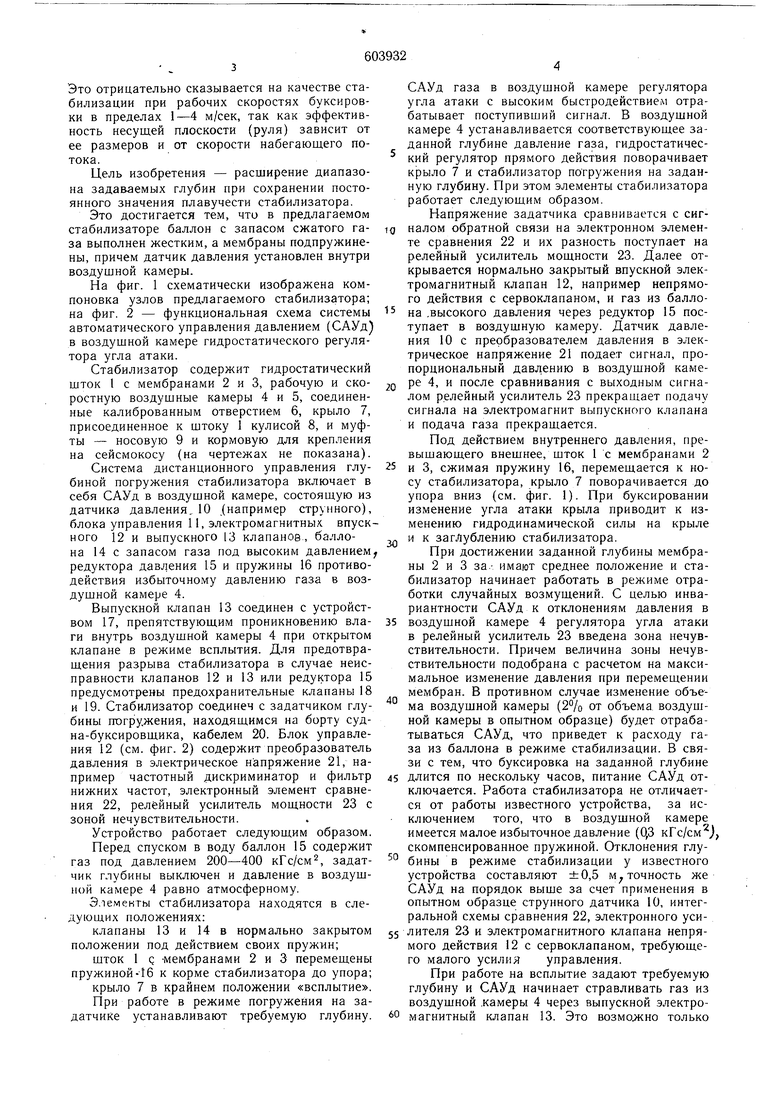
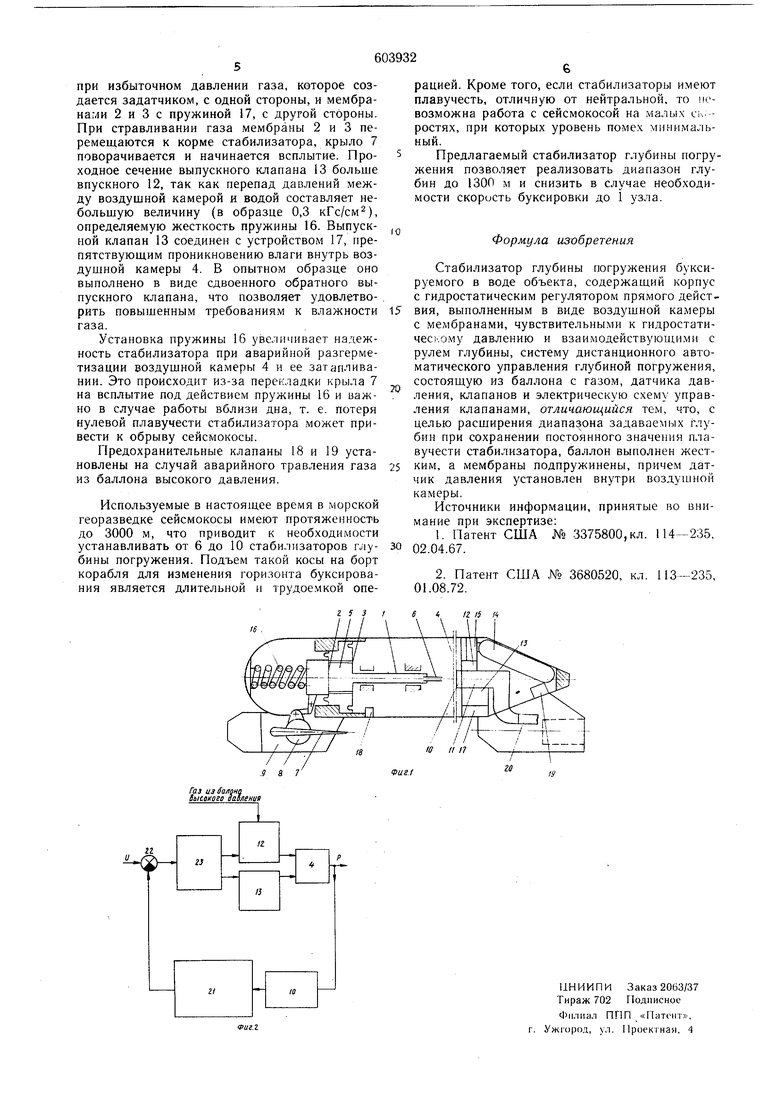
На фиг. 1 схематически изображена компоновка узлов предлагаемого стабилизатора; на фиг. 2 - функциональная схема системы автоматического управления давлением (САУд) в воздушной камере гидростатического регулятора угла атаки.
Стабилизатор содержит гидростатический шток 1 с мембранами 2 и 3, рабочую и скоростную воздушные камеры 4 и 5, соединенные калиброванным отверстием 6, крыло 7, присоединенное к штоку 1 кулисой 8, и муфты - носовую 9 и кормовую для крепления на сейсмокосу (на чертежах не показана).
Система дистанционного управления глубиной погружения стабилизатора включает в себя САУд в воздушной камере, состоящую из датчика давления,10 (например струнного), блока управления 11, электромагнитны.с впускного 12 и выпускного 13 клапанов, баллона 14 с запасом газа под высоким давлением редуктора давления 15 и пружины 16 противодействия избыточному давлению газа в воздушной камере 4.
Выпускной клапан 13 соединен с устройством 17, препятствующим проникновению влаги внутрь воздушной камеры 4 при открытом клапане в режиме всплытия. Для предотвращения разрыва стабилизатора в случае неисправности клапанов 12 и 13 или редуктора 15 предусмотрены предохранительные клапаны 18 и 19. Стабилизатор соединен с задатчиком глубины погружения, находящимся на борту судна-буксировщика, кабелем 20. Блок управления 12 (см. фиг. 2) содержит преобразователь давления в электрическое напряжение 21, например частотный дискриминатор и фильтр нижних частот, электронный элемент сравнения 22, релейный усилитель мощности 23 с зоной нечувствительности.
Устройство работает следующим образом.
Перед спуском в воду баллон 15 содержит газ под давлением 200-400 к.Тс1см, задатчик глубины выключен и давление в воздушной камере 4 равно атмосферному.
Элементы стабилизатора находятся в следующих положениях:
клапаны 13 и 14 в нормально закрытом положении под действием своих пружин;
щток 1 Q -мембранами 2 и 3 перемещены пружиной-16 к корме стабилизатора до упора;
крыло 7 в крайнем положении «всплытие.
При работе в режиме погружения на задатчике устанавливают требуемую глубину.
САУд газа в воздущной камере регулятора угла атаки с высоким быстродействием отрабатывает поступивший сигнал. В воздушной камере 4 устанавливается соответствующее заданной глубине давление газа, гидростатический регулятор прямого действия поворачивает крыло 7 и стабилизатор погружения на заданную глубину. При этом элементы стабилизатора работает следующим образом.
Напряжение задатчика сравнивается с сигналом обратной связи на электронном элементе сравнения 22 и их разность поступает на релейный усилитель мощности 23. Далее открывается нормально закрытый впускной электромагнитный клапан 12, например непрямого действия с сервоклапаном, и газ из баллона .высокого давления через редуктор 15 поступает в воздушную камеру. Датчик давления 10 с преобразователем давления в электрическое напряжение 21 подает сигнал, пропорциональный давлению в воздушной камере 4, и после сравнивания с выходным сигналом релейный усилитель 23 прекращает подачу сигнала на электромагнит выпускного клапана и подача газа прекращается.
Под действием внутреннего давления, превышающего внешнее, щток 1 с мембранами 2
и 3, сжимая пружину 16, перемещается к носу стабилизатора, крыло 7 поворачивается до упора вниз (см. фиг. 1). При буксировании изменение угла атаки крыла приводит к изменению гидродинамической силы на крыле
и к заглублению стабилизатора.
При достижении заданной глубины мембраны 2 и 3 за.- имают среднее положение и стабилизатор начинает работать в режиме отработки случайных возмущений. С целью инвариантности САУд к отклонениям давления в
воздушной камере 4 регулятора угла атаки в релейный усилитель 23 введена зона нечувствительности. Причем величина зоны нечувствительности подобрана с расчетом на максимальное изменение давления при перемещении мембран. В противном случае изменение объема воздущной камеры (2% от объема воздущной камеры в опытном образце) будет отрабатываться САУд, что приведет к расходу газа из баллона в режиме стабилизации. В связи с тем, что буксировка на заданной глубине
длится по нескольку часов, питание САУд отключается. Работа стабилизатора не отличается от работы известного устройства, за исключением того, что в воздущной камере имеется малое избыточное давление (0,3 кГс/см), скомпенсированное пружиной. Отклонения глубины в режиме стабилизации у известного устройства составляют ±0,5 м точность же САУд на порядок выше за счет применения в опытном образце струнного датчика 10, интегральной схемы сравнения 22, электронного усилителя 23 и электромагнитного клапана непрямого действия 12 с сервоклапаном, требующего малого усилия управления.
При работе на всплытие задают требуемую глубину и САУд начинает стравливать газ из воздущной .камеры 4 через выпускной электромагнитный клапан 13. Это возможно только
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЙСМОКОСА, ОТСЛЕЖИВАЮЩАЯ МОРСКОЕ ДНО | 2007 |
|
RU2451309C2 |
| СПОСОБ ИЗЛУЧЕНИЯ ЗВУКА В ЖИДКУЮ СРЕДУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2071637C1 |
| ИНДИВИДУАЛЬНОЕ УСТРОЙСТВО ДЛЯ ПЛАВАНИЯ И КОРПУС ДЛЯ НЕГО | 2013 |
|
RU2552758C1 |
| Буксируемый неавтономный подводный грузовой контейнер | 2021 |
|
RU2762187C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| ПОДВОДНЫЙ АППАРАТ | 1998 |
|
RU2137659C1 |
| Устройство для раскрытия и поддержания траловой сети на определенной глубине погружения | 1949 |
|
SU80395A1 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА С ИСПОЛЬЗОВАНИЕМ БУКСИРУЕМЫХ КОМПОНЕНТОВ, НАХОДЯЩИХСЯ НИЖЕ ПОВЕРХНОСТИ ВОДЫ | 2015 |
|
RU2672044C2 |
| Гидростатический якорь | 1980 |
|
SU899385A1 |
