Изобретение относится к автомати ческому угфавлемшо и предназначено :для управления перемещением электро механического объекта по заданной траекторий в трехмерном ортогональн пространстве, том числе для управ ления движением схвата или технологичес1 ого органа промьяиленного робота, подачи металлорексущих станков и других устройств, где требует ся точное воспроизведение пространственной кривой. Цель изобретения состоит в повышении точности отслеживания програм мной пространственной траектории. На чертеже приведена с груктурная схема предлагаемого устройства. Система содержит программный блок 1, эталонную модель 2, блок 3 масштабных коэффициентов эталонного сигнала, и каналы управления По чис лу координат движения, каждый из ко торых состоит из регулятора 4, привода 5, механизма 6 канала, блока 7 датчиков состояния, фнльтра-дИфференциатора 8, блока 9 масштабных коэффициентов сигнала фильтра-диффе ренциатора, цифроаналогового делителя 10, блока 11 сравнения, нелинейного усилителя 12, регистра 13. Эталонная модель 2 представляет собой активный фильтр п-го порядка, настройка которого обеспечивает желаемую динамику движения механизмов канала. Фильтр-дифференциатор выполняется на.операционных усилителях и служит для восстановления неизмеряемых переменных состояния. Блоки ма ш1табных коэффициентов эталойного сигнала и сигнала фильтрадифференциатора выполнены в виде суммирунмцих операционных усилителей с., п вА)дами, по каждому из которых :реализован соответствуимций коэффициент усиления. Нелинейный усилитель имеет статическую характеристику, близкую к релейной. Система функционирует следующим образом. Программный блок 1 вырабатывает задающие сигналы перемещения по каждому каналу х., выбирает наибольший из них , ..., XnJ и вычисляет коэффициент пропорциональности по каждому каналу . , На вход эталонной модели 2 подается сигнал, соответствующий наибольшему перемещению х, на выходе эталонной модели вырабатываются переменные состояния,: х, х ,, х и т.д. Эти сигналы суммируются с соответствующими коэффициентами в блоке масштабных коэффициентов эталонного сигнала 3. Полученный эталонный сигнал умножается в каждом канале цифроаналоговым делителем 10 на коэффициент пропорциональности К, поступа1ощий в цифровом коде с программного блока 1 через регистр 13.« Каждый канал управления, замкнутый по положению (блоки 4-7), отрабатывает свой заданнций сигнал х-, « и переменные состояния, изм€ряе ые непосредственно 1ШИ восстановленные с помощью фиЛьтра-дифференДиатора 8, масштабируются и суммируются в блоке 9. Полученный сигнал, характеризующий действительное состояние механизма канала сравнивается в блоке 1 1 с эталоннь1м сигналом, полученным в блоке 10, и через нелинейный усилитель 12 подается на второй вход привода 5. Характеристика нелинейного усилителя, близкая к релейной, обеспечивает быстродействие к аналу самонастройки и точность поддержания пропорциональности всех переменных состояний в каждом канале управления.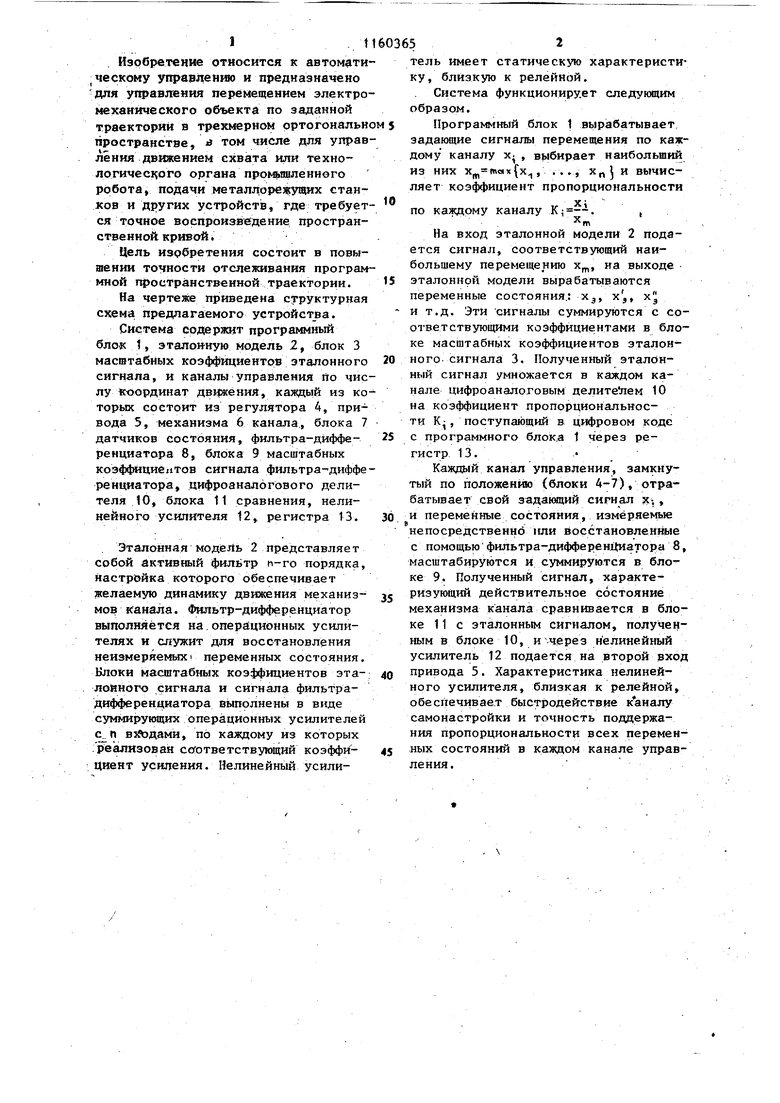
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2006 |
|
RU2329454C2 |
| Цифроаналоговая вычислительная система | 1987 |
|
SU1483468A1 |
| Двухкоординатная система для программного управления | 1985 |
|
SU1249483A1 |
| Устройство для регулирования температуры | 1981 |
|
SU980076A1 |
| Устройство для управления синхронно перемещающимися механизмами станка | 1981 |
|
SU985760A1 |
| ФОТОПРИЕМНОЕ ПРОГРАММНО-УПРАВЛЯЕМОЕ УСТРОЙСТВО | 1992 |
|
RU2092928C1 |
| Устройство для диагностического контроля решающих блоков аналоговой вычислительной модели | 1979 |
|
SU809986A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1249478A1 |
| Цифровой фазометр | 1985 |
|
SU1298687A2 |
| ЦИФРОВОЙ МАГНИТОФОН | 1992 |
|
RU2054715C1 |
САМОНАСТРАИВАЮП1АЯСЯ СИСТЕМА УПРАВЛЕНИЯ, содержащая программный блок, первый выход которого соединен с входом эталонной модели, а остальные выходы - с входами соответствующих каналов регулирования координат движения, состоящих из последовательно соединенных регулятора, привода, механизма канала, блока датчиков jсостояния, фильтра-дифференциатора и блока сравнения, отличающаяся тем, что, с цель повышения точности отслеживания программной пространственной траектории, в систему дополнительно введены блок масштабных коэффициентов эталонного сигнала, а в каждый канал - блок масштабных коэффициентов сигнала фильтрадифференциа тора, нелинейный усилитель, регистр и цифроаналоговый делитель, причем входы блока масштабных коэффициентов эталонного сигнала подключены к выходам эталонной модели, в каждом канале входы блока масштабных коэффициентов сигТ1ала фильтра-дифференциатора соединены с соответствующими выходами фильтра-ди(||ферен.циатора, т а выход - с первым входом блока сравнения, выход которого подключен к входу нелинейного усилителя, соединенного своим вб1ходом с вторым входом привода, вход регистра подключен к выходу программного блока, а выход - к цифровому входу цифроа налогового делите ля, второй вход которого соединен о с выходом блока масштабных коэффициенГ Э О5 тов эталонного сигнала, а выход с вторым входом блока сравнения. . Р1
| Устройство для программного управления перемещениями | 1978 |
|
SU748351A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторское свидетельство СССР № , .кл.С 05 В 19/18, 1980 | |||
| Dubowsky S., Desforges D.T | |||
| The Application of Model-Referenced Adaptive Control to Robotic Manipulators | |||
| - Joint Automatic control conference | |||
| Denver, 1979, p | |||
| Способ получения олифы или массы для приготовления лаков | 1913 |
|
SU507A1 |
