Изобретение относится к области автоматики и вычислительной техники и может быть использовано в системах числового программного управлб-. ния (ЧПУ.) перемещениями механизмов -станков и машин..
В известном устройстве задача формирования программы перемещений механизмов и задача отработки программы решаются функционально и схемотехнически разделенными устройствами l.
Недостатком таких устройств явля- ется ограниченность функциональных возможностей управления перемещением механизмов, так как увеличение количества управляемых мехайизмов Приводит к пропорциональному уве йчению состава аппаратуры и соответствуняЦёму снижению надежности, а изменение требований к измерительной системе - к значительным и дорогостоящим переделкам в аппаратной части устройства.
Наиболее близким техническим решением к данному изобретению является устройство для числового программного управления перемещениями 2, содержащее формирователь уЯрайляющих программ, датчики Пёрё УГёщё нййУ
формирователи сигналов датчиков,входной коммутатор, согласующий коммутатор и распределитель, причем одна
5 fpyrirta Bk6SdB вх&дйбгб йомМутатЬра соединена с выходом формирователя управляющих Программ, другая группа . входов - с выходами формирователей сигналов датчиков, одна группа выходов согласующего коммутатора соединена с входами датчиков перемещения, другая группа выходов - с управ.ляющими входами приводов механизмов первые два выхода распределителя
5 соединены с управляющими входами ко.ммутаторов.
При работе устройства разность сигналов заданного и фактического перемещений отрабатывается в блоке
20 вычислений и через выходной коммутатор подается на устройство управления механизмами.
Распределитель обеспечивает последовательную во времени и согласованную обрабртку сигналов фактического перемещения и рассогласования по каждой координате.
В этом устройстве применены иэмерительные системы фазового типа с
. отдельным устройством запитки. Формиование сигналов фактического перёмеения осуществляется аппаратно-реалиэованными схемами для обработки фаэоодулированных сигналов и требуются значительные изменения при переходе на другую измерительную систему, что является существенным недостатком устройства.
Таким образом, общим недостатком известных устройств является ограниченность функциональных возможностей, снижение точности и надежности устройств для программного управления перемещениями из-за аппаратной реаизации измерительных систем и устойств формирования сигналов фактиеского, перемещения, что приводит к тому, ЧТО эти устройства ориентированы на конкретное приьленение с измерительной системой определенного типа, и требуются значительные схемные изменения при переходе на другую измерительную систему или при смене способа формирования сигнала рассогласования, при этом снижается точность измерительных систем и у величивается стоимость из-за необходимости индивидуальной регулировки узлов, входящих в измерительную систему ,- кроме того, снижается надежность при увеличении числа управляемых механизмов , так как аппаратная часть измерительных систем растет пропорционально числу управляемых механизмов .
;;,.Целью изобретения является расширение области применения устройства.
Поставленная цель достигается тем, что в устройство программного управления перемещениями, содержащее блок управления и первый коммутатор, первый информационный вход которого соединен с выходом блока ввода программы, вторые информационные входы через формирователи сигналов - с выходами датчиков перемещения, а управляющий вход - с первым выходом распределителя, подключенного вторым выходом к управляющему входу второго коммутатора, одни выходы которого подсоединейы ко входам датчиков перемещения , другие выходы - к выходам устройства, а первый информационный вход через блок рассогласования - к первому выходу вычислительного блока, введены блоки памяти и пять регйстрбв, выводы которых подключены ;к первым входам вычислительного блч|{ ;а, соединеЯного вторым входом через первый блок памяти с третьим выходом распределителя, вторым выходом - с соответствующими входами пяти регистров, а третьим выходом со входом распределителя, четвертый выход которого подключен через последов но соединенные блрк управления и второй блок памяти ко вто .рому информационному входу второго коммутатора, первый выход первого
коммутатора соединен с одним из входов первого регистра, второй выход - , с одним из входов второго регистра и со вторым входом блока управления, подключенного третьим входом ко второму выходу третьего регистра.
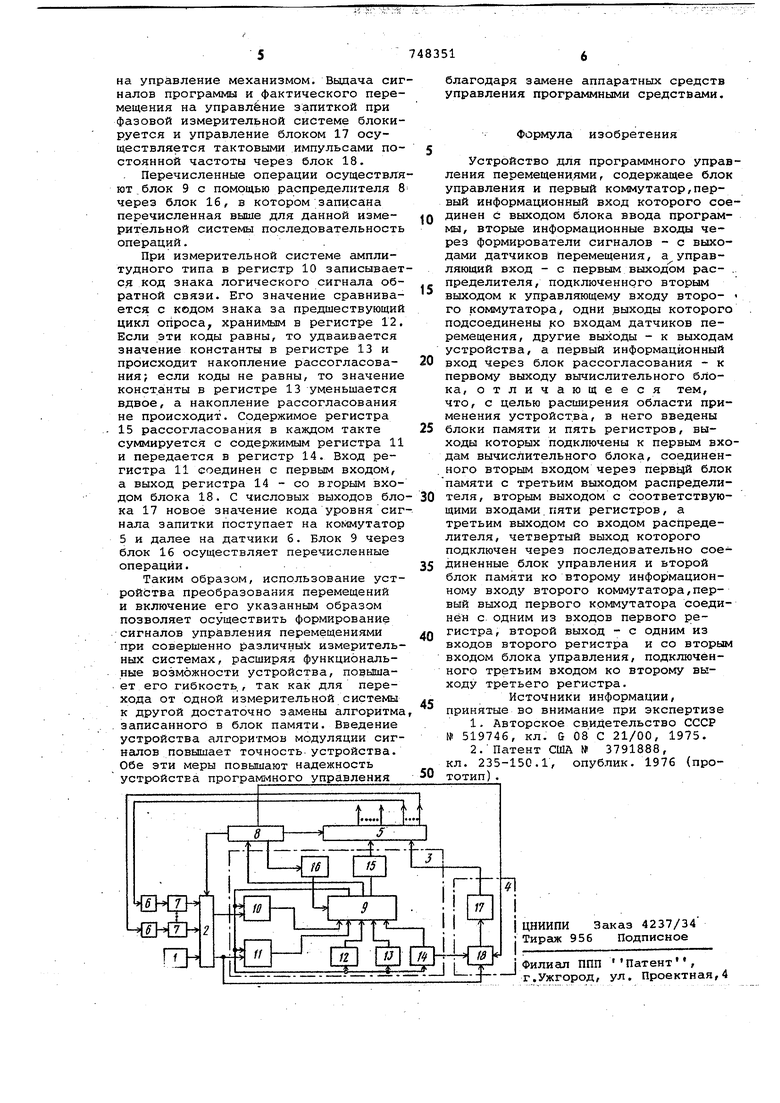
Сущность изобретения поясняется чертежом, где представлена функциональная схема устройства, содержавдая блок ввода программы 1, первый коммутатор 2, устройство преобразования
перемещений 3, устройство алгоритмов модуляции сигналов 4, второй коммутатор 5, датчики перемещения б, формирователи сигналов 7, распределитель 8; устройство 3 .состоит из вычислительного блока 9, первого 10, второго 11, четвертого 12, пятого 13 и третьего 14 регистров, блока рассогласования 15 и первого блока памяти 16, устройство 4 - из второго блока
0 -памяти 17 и блока управления 18.
Устройство работает следующим образом.. .
Блок 1 осуществляет задание проJ граммируемых перемещений по всем координатам, информация о которых через коммутатор 2 поступает на числовые входы устройства 3 и на второй вход устройства 4, с числовых выходов которого через коммутатор 5, вклЬчаю0 щий цифроаналоговые преобразователи и согласующие усилители, сигнал поступает на запитку датчиков 6. Сигналы с выходов датчиков 6 преобразуются формирователями 7 в логическую
С или цифровую форму и через -коммута тор 2 подаютсй нгР числовые входы устройства 3, в котором в соответствии с заложенным алгоритмом преобразуются сигналы программы, сигналы фактического перемещения и вырабатываются сигналы рассогласования по координатам, поступающие на коммутатор 5 и далее.на блок управления ме- . ханизмами. Преобразованные си1налы программы поступают на первый вход
5 устройства 4 модуляции.
При измерительной системе фазового типа код фактического перемещения в пределах оборота (цикла) фазы формируются в регистре 10 обратной связи по строб-импульсу с соответствующего формирователя 7, из него вычитается значение кода за предыдущий цикл опроса по данной координате, хранящееся в регистре 12.. Полученная разе ность сравнивается со значением оборота фазы, выраженным в дискретах программы и хранящимся в регистре 13.
Эта операция необходима для компенсации цикличности кода обратной связи. . :
0 Приращения кода обратной связи накапливаются в регистре 14 и вычитаются из содержимого регистра 11 хранения программы. Разность сигналов программы и перемещения хранится в
5 рассогласования 15 и поступает
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования перемещения в код | 1981 |
|
SU978174A1 |
| Многоканальное устройство для управления следящими приводами | 1977 |
|
SU691809A1 |
| Система числового программного управления | 1986 |
|
SU1386963A1 |
| Устройство для преобразования перемещений в код | 1978 |
|
SU742999A1 |
| Преобразователь перемещений в код | 1977 |
|
SU674067A1 |
| Устройство цифрового программного управления для измерения теплофизических характеристик материалов | 1990 |
|
SU1753383A2 |
| Устройство для программного управления станком | 1985 |
|
SU1352458A1 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1311024A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| АВТОМАТИЗИРОВАННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ЗАПРАВКОЙ КРИОГЕННОГО РАЗГОННОГО БЛОКА | 1995 |
|
RU2084011C1 |
