раммного управления первый коммутатор 6 и подключенные к блоку программного управления два канала управления, состоящие из последовательно соединенных блока 8 сравнения, цифроаналогового преобразователя 9, сумматора 10 корректирующих сигналов, сервопривода Г1 исполнительного .механизма и датчик 12 положения,, подключенного к второму входу .блока сравнения, дополнительно введены последовательно соединенные второй блок 4 сравнения, релейный элемент 5 и второй коммутатор 7, подключенный к блоку 1 программного управления, а в к-аждый канал управления введены сумматор 14 взвешенных сигналов и блок 13 датчиков скорости и ускорения, расположенный на сервоприводе исполнительного механизма, причем входы сумматора 14
Изобретение относится к автоматике и вычислительной технике, в частности к системам программного управ- ления координатными перемеш.ениями ис пытательных и технологических орга- ров.
Цель изобретения состоит в повышении быстродействия и точности дв-ух- координатной системы программного уп равления путе.м формирования корректи рующего сигнала и применения быстродействующего регулятора, обеспечивающих сохранение задаваемой программной пропорциональности.выходных переменных за счет поддержания пропорциональности координатнык рассогласований и всех измёряемь1х в серво- приводах переменных состояния.
Вновь вводимые блоки обеспечивают быстродействие процессу коррекции, так как при нарушении заданной пропорциональности между каналами сравнивающее устройство дает сигнал на релейный элемент, который через второй коммутатор посылает максимальный сигнал соответствун)щего знака в ведо- .мьй канал и тем самым сразу ликвидирует его отставание (опережение).
подключены к выходам блока 13 датчиков скорости и ускорения и к выходу цифроаналогового преобразователя 9, а выходы сумматоров 14 взвешенных сигналов через, первый коммутатор 6 подключены к вторым входам множительного элемента 3 и второго блока 4 сравнения, выход релейного элемента 5 через второй коммутатор 7 подключен к вторым входам сумматора 10 корректирующих сигналов, а выход множительного «элемента 3 подключен к первому входу второго, блока сравнения -Изобретение может быть использовано в графопостроителях и коордц- натографах с линейной интерполяцией, а также в системах программного управления металлорежущего оборудования и других системах линейного двух- координатного перемещения исполнительного органа. 3 ил.
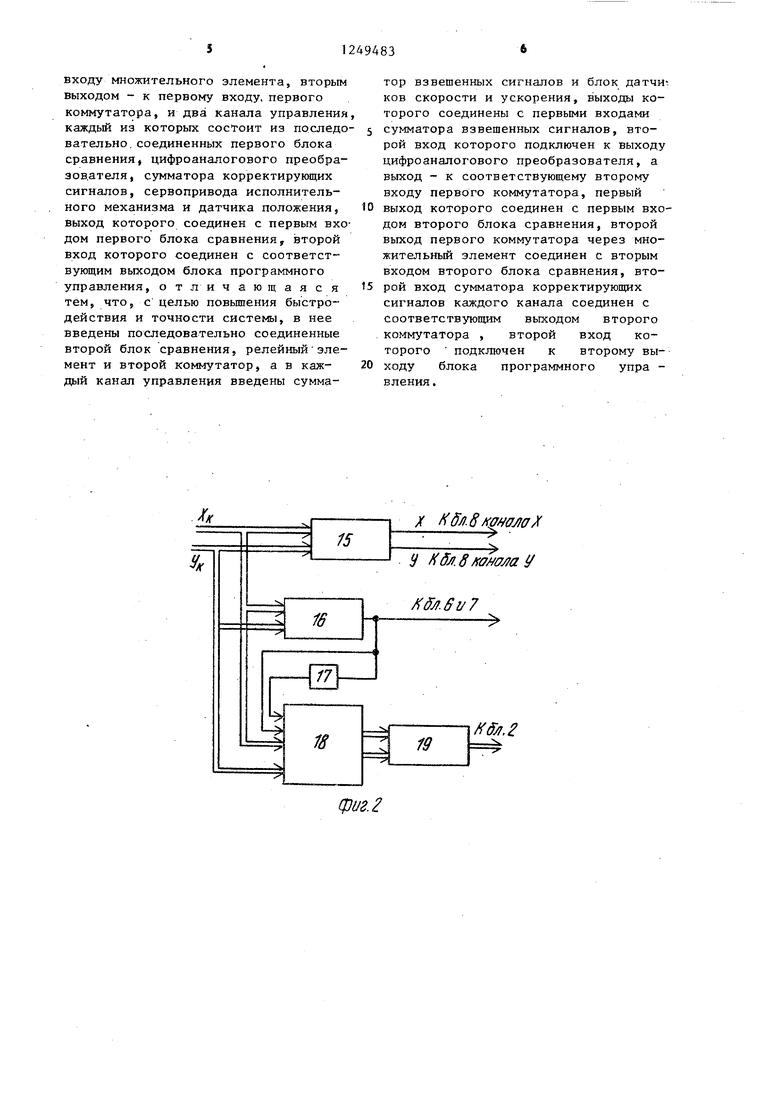
На фит, 1 приведена функциональная схема системы; на фиг. 2 - блок программного управления, вариант; на-фиг. 3 - отдельные блоки на опера- -ционных усилителях, аналоговых пере- ключателях и инверторе, вариант.. . . Двухкоординатная система программного управления содержит блок 1 программного управления, регистр 2,
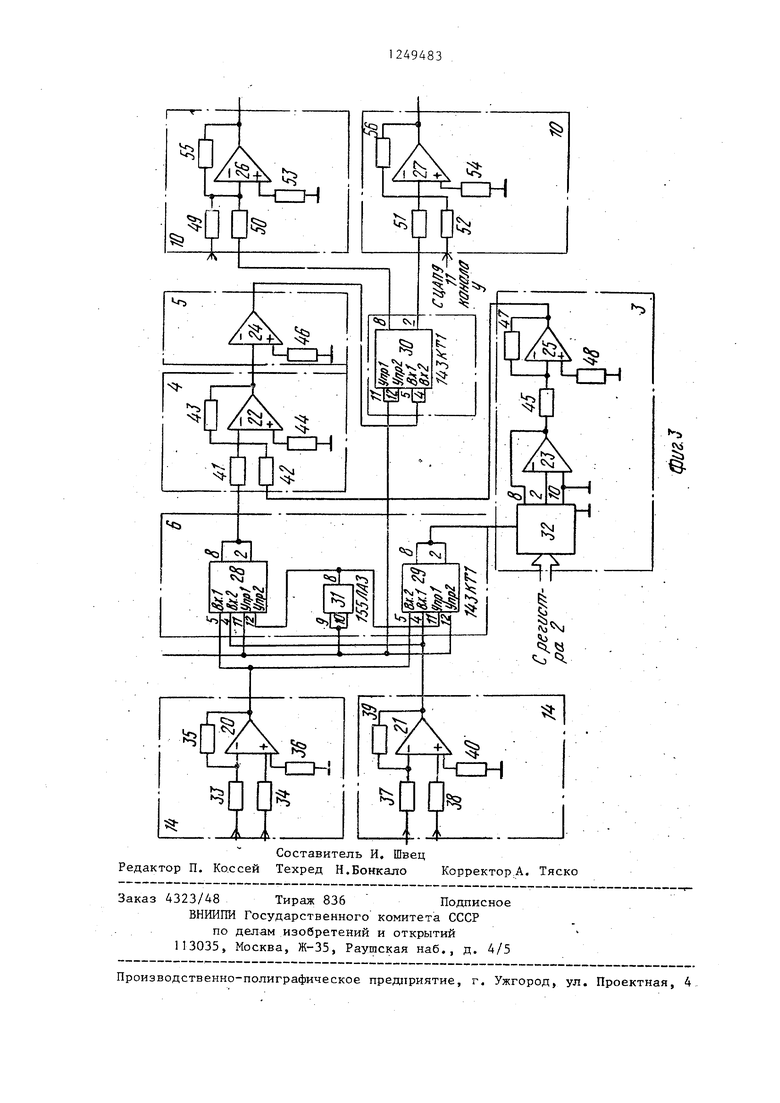
множительный элемент 3, блок 4 сравнения., релейный элемент 5, первый 6 и второй 7 коммутаторы, а та кже в каждом канале управления блок 8 сравнения, цифроаналоговый.преобразователь сумматор 10 корректирующего сигнала, сервопривод 11 исполнительного механизма, датчик 12 положения, блок 13 датчиков скорости и ускорения и сумматор 14.взвещенных сигналов, Блок 1 программного управления содержит интерполятор 15, элемент 16 сравнения, элемент НЕ 17, мультиплексор 18, делитель 19,схема (фиг.З) содержит также операционные усилители 20-27, аналоговые переключатели 28-30, элемент И 31, цифровой преобразователь 32 , резисторы 33 - 56.
В двухкоординатной системе программного управления один из каналов является ведущим, работающим с максимальной скоростью, а второй с меньшей скоростью, определяемой уг- лом наклона траектории: если угол наклона траектории к оси X меньше 45 то ведущим является канал X, в противном случае-- ведущий канал У.
Работа системы заключается в еле- дующем о
С блока 1 программного управления 1 подаются сигналы, соответствующие заданным перемещениям в каналах )( и У , на замкнутые следящие системы, состоящие из блока 8 сравнения, цифроаналогового преобразователя 9, сумматора 10 корректирующих сигналов, сервопривода 11 исполнительного механизма и датчика 12 по- ложения. Остальная часть схемы вырабатывает дополнительный корректирующий сигнал, повьпаающий точность, подаваемый на второй вход сумматора 10 корректирующих сигналов. Для этого предусмотрен связанный с сервоприводом I1 исполнительного механизма блок 13 датчиков скорости и ускорения, дающий дополнительные сигналы, соответствующие скоростям и ускоре- ниям перемещения сервопривода, которые гуммируются с весовыми коэффициентами в сумматоре 14 взвешенных сигналов в аналоговой форме, выходы которых через коммутатор 6 подсоеди- няются к аналоговому входу множительного элемента 3 и первому входу блока 4 сравнения. Если угол наклона траектории й1 45° , то с выхода блока 1 программного управления на управляющий вход коммутатора 6 подается сигнал такой полярности, что коммутатор 6 соединяет выход сумматора 14 взвещенных сигналов (канала k ) со входом блока 4 сравнения, а соответствующий выход канала - с входом множительного элемента 3. UpH( выход канала У подключается на вход блока 4 сравнения, а выход канала X - на вход множитель- кого элемента 3. Тогда сигнал, подаваемый на аналоговый вход множительного элемента 3, умножается на тангенс угла наклона траектории т, подаваемый на цифровом коде с блока 1 программного управления через регистр 2 на цифровой вход множитель- него элемента 3, выход которого подключен на второй вход блока 4 сравнения. Таким образом, производится сравнение взвешенных сигналов рассогласования с учетом заданного коэффициента пропорциональности н через релейный элемент 5, и коммутатор 7, управляемый тем же двоичным сигна- лом, что и коммутатор 6, подает релейный сигнал рассогласования в ведомый канал на второй вход сумматора 10 корректирующего сигнала. Этот дополнительный корректирующий сигнал .обеспечивает пропорциональность перемещений и скоростей каналов У и как в установившемся, так И в переходных режимах, и является быстродействующим блогодаря релейному элементу. Блок 1 программного управления выдает следующие сигналы: задающие сигналы в каналы У и У (на входы блока 8) в соответствии с алгоритмом интерполяции; коэффициент наклона отУ -Y резка интерполяции tge(, к- при lit 45 или tg(i -) при (i 45 в
цифровом коде на блок 2; двоичный сигнал для управления коммутаторами 6 и 7 в зависимости от величины угла (.
Если интерполятор имеет импульсный выход, то блок 8 сравнения должен выполняться как реверсивный счетчик и должен быть применен импульсный датчик положения.
Под блоком I3 датчиков понимается совокупность измерителей (измерителей- скорости, тока двигателя, а также идентификаторы переменных состояний при наличии неизмеряемых переменных ) о
Множительньй элемент 3, выполнен- ный на схеме умножающего цифрового преобразователя и операционном усилителе, представляет собой цифровой аттенюатор, т.е. цифроаналоговый преобразователь, в котором вместо опорного напряжения используется переменный входной сигнал, а выходной аналоговый сигнал пропорционален произведению аналогового и цифрового входньи сигналов.
Формула изобретения
Двухкоордннатная система для программного управления, содержащая блок программного управления, подключенный первым выходом через регистр к
входу множительного элемента, вторым выходом - к первому входу, первого коммутатсэра, и два канала управления каждьм из которых состоит из последо вательно.соединенных первого блока сравнения, цифроаналогового преобра- зов.ателя, сумматора корректирующих сигналов, сервопривода исполнительного механизма и датчика положения, выход которого соединен с первым входом первого блока сравнения второй вход которого соединен с соответствующим выходом блока программного управления, отличающаяся тем, что, с целью повьшения быстродействия и точности системы, в нее введены последовательно соединенные второй блок сравнения, релейныйэлемент и второй коммутатор, а в каж- дый канал управления введены сумматор взвешенных сигналов и блок датчиков скорости и ускорения, выходы которого соединены с первыми входами сумматора взвешенных сигналов, второй вход которого подключен к выходу цифроаналогового преобразователя, а выход - к соответствующему второму входу первого коммутатора, первый выход которого соединен с первым входом второго блока сравнения, второй выход первого коммутатора через множительный элемент соединен с вторым входом второго блока сравнения, второй вход сумматора корректирующих сигналов каждого канала соединен с соответствующим выходом второго коммутатора , второй вход которого подключен к второму выходу блока программного упра - вления.

| название | год | авторы | номер документа |
|---|---|---|---|
| СКАНИРУЮЩАЯ СИСТЕМА | 1991 |
|
RU2024896C1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Устройство для формирования корректирующего сигнала телевизионного датчика | 1982 |
|
SU1125772A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365965C2 |
| Самонастраивающаяся система управления | 1983 |
|
SU1160365A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| ТАНКОВЫЙ БАЛЛИСТИЧЕСКИЙ ВЫЧИСЛИТЕЛЬ | 1979 |
|
SU1840108A1 |
| Устройство позиционного программ-НОгО упРАВлЕНия | 1978 |
|
SU807228A1 |
| Устройство формирования сигнала для коррекции искажений телевизионного изображения | 1985 |
|
SU1264373A1 |
| Замкнутый шаговый электропривод с самокоммутацией и дроблением шага | 1988 |
|
SU1511842A1 |
Изобретение относится к автоматике и вычислительной технике, в частности к системам программного управления координатными перемещениями испытательных и технологических органов. Цель изобретения - повышение быстродействия и точности системы программного управления. Данная двухкоординатная система программного управления позволяет повысить лроизводительность и точность воспроизведения прямых .контурных линий исполнительными органами подобных систем. В двухкоординатчую систему программного управления, содержащую блок 1 программного управления с последоват: льно подключенными регистром 2 и множительным элементом 3, подключенный к блоку прог о (Л со 4 00 оо 
/ Кбл.8ffowjia;(
У .8/fo/ {7Mai/
/fd/f.e
фиг. 2
Составитель И. Швец Редактор П. Ко.ссей Техред Н.Бонкало Корректор.
Заказ 4323/48 Тираж 836 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Двухкоординатная система программного управления | 1972 |
|
SU448436A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для двухкоординатногоупРАВлЕНия Об'ЕКТОМ | 1979 |
|
SU853610A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аналоговые интегральные схемы | |||
| Под ред | |||
| С | |||
| В | |||
| Якубовского | |||
| М.: Советское радио, с | |||
| ПАРОВАЯ ИЛИ ГАЗОВАЯ ТУРБИНА | 1914 |
|
SU278A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Шило В | |||
| А | |||
| Функциональные аналоговые интегральные микросхемы, М.: Радио и связь, 1982, с | |||
| Железобетонный фасонный камень для кладки стен | 1920 |
|
SU45A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
