(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СИНХРОННО
ПЕРЕМЕЩАЮЩИМИСЯ МЕХАНИЗМАМИ СТАНКА
1
Изобретение относится к автоматическому управлению и предназначено для уп.равленин станками, имеющими портальную Срамную) конструкцию. Оно может быть также использовано в других отраслях техники, где требуется синхронное перемещение двух и более объектов.
Известно устройство для управления синхронно перемещающимися объектами, содержащее блок ввода программы, первый и второй приводы с датчиками скорости вращения двигателей, первый и второй позиционные датчики, преобразователь, блок сравнения, блок временной задержки .и сумматор 1 .
Такое устройство управляется заданием величины и скорости перемещения обеих сторон портала от одного канала устройства числового программного управления, т. е. задание программируется для одного привода.
Введение в канал управления блока временной задержки и зависимого управления скоростью привода второй стороны портала от скорости привода первой стороны портала позволяет уменьшить постоянное рассогласование положений обеих сторон портала и согласовать характеристики приводовв переходных режимах.
Однако данное устройство обладает недостаточной точностью и быстродействием, так как сигнал задания на второй канал поступает позже, чем на первый. Кроме
to того, точность системы ухудшается при изменении параметров каналов и при воздействии нагрузки. .Известно также устройство для синхронного управления исполнительными ме15ханизмами, содержащее входную, шину, интегратор и каналы управления, каждый из которых состоит из последовательно соединенных дифференциального усилителя, релейного элемента, исполнительного ме20ханизма, датчика перемещения, а также согласующих элементов С 1
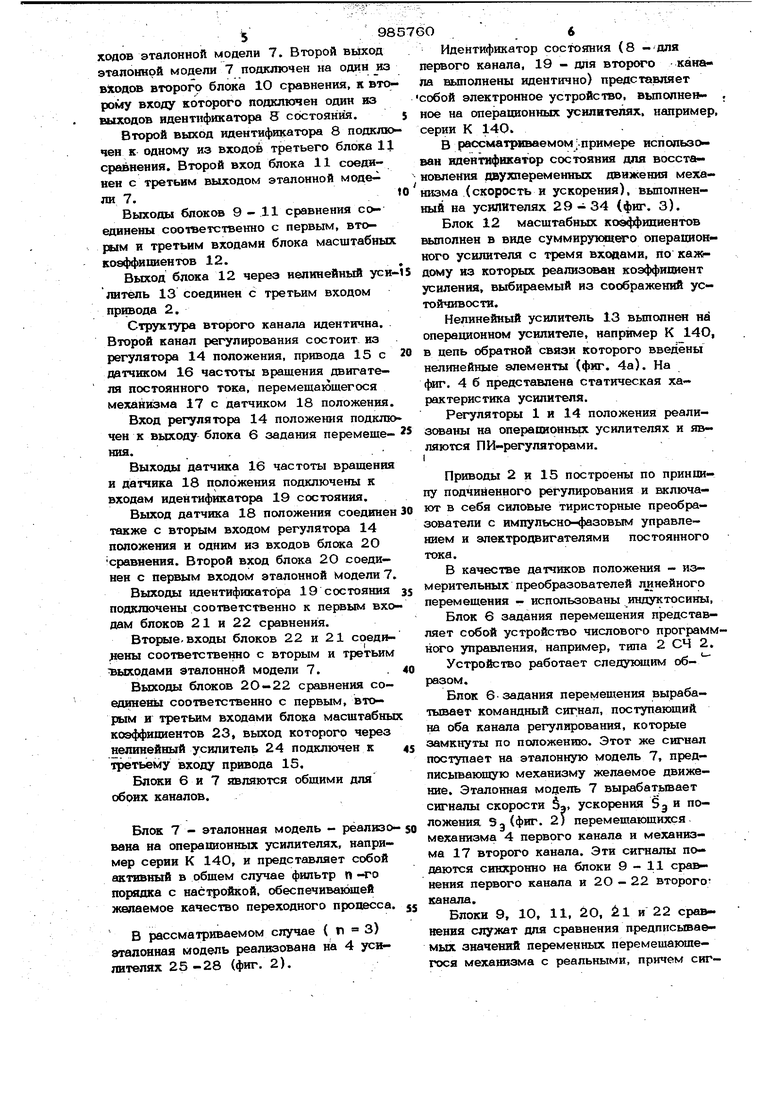
Синхронизация в системе достигается за счет формирования на инвертирующих входах дифференциальных усилителей дополнительных сигналов, действующих на изменение пололшний исполнительных механизмов Б сторону выравнивания. Однако данное устройство обладает невысокой точностью синхронного перемещения в условиях возмущений, действующих на исполнительные механизмы. Наиболее близким к предлагаемому является устройство- для регулирования ско- рости вращения двухдвигательного привода которое содержит блок задания перемещения и два канала регулирования, каждый из которых состоит из регуляторов, привода, блоков сравнения, блока масштабных коэффициентов, нелинейных усилителей и датчиков скорости и положения, осуществляющих идентификацию состояния объекта управления. Сигнал управления формируется за счет сравнения сигналов с датчиков скорости каждого канала, а также сигналов с датчиков положения с последующим формированием линейной комбинации разностей, которая через нелинейный усилитель поступает, на входы регуляторов приводов Однако известное устройство имеет недостаточную точность и быстродействие в условиях изменения параметров каналов и возмущений, действующих на механизмы Цель изобретения - повьпиение точности и быстродействия устройства в условиях изменения параметров каналов и воз мущений, действующих на механизмы. Поставленная цель достигается тем, что в устройство (2 ) , содержащее блок задания перемещения и по числу механизмов - каналы регулирования, каждый из которых содержит п блоков сравнения, по следовательно соединенные расположен- ный на механизме датчик положения, регу лятор положения, привод, датчик частоты вращения двигателя, идентификатор состоя ния, последовательно соединенные блок масщтабных коэффициентов, нелинейный усилитель, подключенный выходом к второ му входу привода, третий вход которого соединен, с выходом датчика частоты вращения .двигателя, первый, второй, ,,, Ии п-ый вход1л блока масщтабных коэффипиентов подключены соответственно к выходам первого, второго ,,, п -1 и п -го блоков сравнения, первый вход первого бдока сравнения соединен с выходом дат чика положения и с вторым входом идентификатора состояния, п -1 фыходов которого подключены соответственно к первым входам второго, третьего, ,,.п-1 и п -го блоков сравнения, вторые входы регуляторов положения каждого канала с€н. единены с выходом. блока задания перемещения, введена общая для всех каналов эталонная модель, первый, второй, . ,, h -1 и п -и выходы которой подключены к вторым входам первого, второго,,,,п -1 и п-го блоков сравнения каждого канала, а вход соединен с выходом блока задания перемещения. Введение общей эталонной модели поз- воляет производить согласование положещи механизмом не за сЧет подчинения движения второго механизма движению перiaoro, как в (1), и не путем введения связей взаимного влияния, как это сделано в (З), а за счет непрерьтного и независимого согласования положений механизмов с переменными, формируемыми эталонной моделью. Изобретение поясняется конкретным примером выполнения устройства. Предлагаемое устройство содержит два канала регулирования, а в формировании закона регулирования участвуют три переменные ( п З) : положение, скорость и ускорьние перемещающегося механизма. На фиг, 1 приведена структурная схема предлагаемого устройства; на фиг. 2 электрическая схема эталонной модели; на фиг, 3 - электрическая схема идентификатора состояния ; на фиг, 4 а, б - элект. рическая схема нелинейного усилителя и его статическая характеристика. Устройство (фиг, 1) содержит каналы регулирования по числу синхронно перемещающихся механизмов, в рассматриваеп. мом случае - два канала регулирования. Первый канал регулирования состоит из последовательно соединенных регулятора 1 положения, привода 2 с датчиком 3 частоты вращения двигателя постоянного тока, перемещающегося механизма 4, например одна из стоек портала в случае перемещения двух механизмов, и Датчика 5 положения. Вход регулятора 1 положения подключен к выходу блока 6 задания перемещения. Выход блока 6 с входом эталонной модели 7. Вькоды датчика 3 частоты вращения двигателя и датчика 5 положения ПОДЕЛК чены к входам идентификатора 8 состояния. Выход датчика 5 положения соединен с входом регулятора 1 положения и одним из входов первого блока 9 сравнения. Второй вход блока 9 соединен с оДиим из ыд- 598 ходов эталонной модели 7. Второй выход эталонной модели 7 подключен на один из входов второго блока 10 сравнения, к ъто- рому входу которого подключен один из выходов идентификатора 5 состояния. Второй выход идентификатора 8 подключен к одному из входов третьего блока 11 сравнения. Второй вход блока 11 соединен с третьим выходом эталонной моде ли 7, Выходы блоков 9-11 сравнения соединены соответственно с первым, вторым и третьим входами блока масштабных коэффициентов 12. Выход блока 12 через нелинейный усилитель 13 соединен с третьим входом привода 2. Структура второго канала идентична. Второй канал регулирования состоит из регулятора 14 положения, привода 15 с датчиком 16 частоты вращения двигателя постоянного тока, перемещающегося механизма 17 с датчиком 18 положения Вход регулятора 14 положения подклк чен к вьосоду блока 6 задания перемещеВыходы датчика 16 частоты вращенш и датчика 18 положения подключены к входам идентификатора 19 состояния. Выход датчика 18 положения соединен также с вторым входом регулятора 14 положения и одним из входов блока 20 сравнения. Второй вход блока 2О соединен с первым входом эталонной модели 7 Выходы идентификатора 19 состояния
подключены соответственно к первым входам блоков 21 н 22 сравнения.
ВторыеВХОДЫ блоков 22 и 21 соеди.нены соответственно с вторым и третьим выходами эталонной модели 7..
Выходы блоков 20-22 сравнения соединены соответственно с первым, вторым и третьим входами блока масштабны коэффициентов 23, выход которого через нелинейный усилитель 24 подключен к третьему входу привода 15,
Блоки 6 и 7 являются общими для обоих каналов.
Блок 7 - эталонная модель - рёализована на операционных усилителях, например серии К 140, и представляет собой активный в общем случае фильтр п -го порядка с настройкой, обеспечивающей желаемое качество переходного процесса.
В рассматриваемом случае (и 3) эталонная модель реализована на 4 усилителях 25-28 (фиг. 2).
перемещения - использованы индуктосины.
Блок 6 задания перемещения представляет собой устройство числового программнсиго управления, например, типа 2 СЧ 2.
Устройство работает следующим образом.
Блок 6 задания перемещения вырабатывает командный сигнал, поступающий на оба канала регулирования, которые замкнуты по положению. Этот же сигнал поступает на эталонную модель 7, предписывающую механизму желаемое движение. Эталонная модель 7 вырабатьгоает сигналы скорости S, ускорения S и положения Эд (фиг. 2) перемещающихся механизма 4 первого канала и механизма 17 второго канала. Эти сигналы подаются синхронно на блоки 9-11 сра&нения первого канала и 2О - 22 второго; канала.
Блоки 9, 10, 11, 20, 1 и 22 сравнения служат для сравнения предписываемых значений переменных перемещающегося механизма с реальными, причем сиг6О6Идентификатор состояния (8 -дпя первого канала, 19 - для второго канала выполнены идентично) представляет собой электронное устройство, выполнен ное на операционных усияитепях, например, серии К 140. В рассматриваемом-примере использо ван идентификатор состояния для восстановления двухпеременных движения механизма (скорость и ускорения), выполненный на усилителях 29-34 (фиг. 3). Блок 12 масштабных коэффициентов выполнен в виде суммируихцего операционного усилителя с тремя входами, по каждому из которых реализсжан коэффициент усиления, выбираемый из соображений устойчивости. Нелинейный усилитель 13 вьшолнен на операционном усилителе, например К 14О, в цепь обратной связи которого введены нелинейные элементы (фиг. 4а). На фиг. 4 б представлена статическая характеристика усилителя. Регуляторы 1 и 14 положения реализованы на операционных усилителях и являются ПИ-регуляторами. 1 Приводы 2 и 15 построены по принципу подчиненного регулирования и включают в себя силовые тиристорные преобразователи с имцульсно-фазовым управлением и электродвигателями постоянного тока. В качестве датчиков положения - измерительных преобразователей линейного 798 нал положения перемещающегося механизма 4 (17)S|u вырабатьгоает датчик 5 (18) положения, а недоступные для измерений сигналы скорости S и ускорения 5 перемещающегося механизма 4 (17)вдентификатор состояния 8 (19). В CTpyicType идентификатора состояния предусмотрено сравнение на входе усилителя 33 (фиг. .3) сигнала положения механизма с соответствующим сигналом идентификатора состояния. Полученная в результате сравнения ошибка через соответствующие коэффи1щенты усиления подается на каждый каскад модели идентифгасатора состояния: на усилитель-интегратор 31 и на усилителыинтегратор 32,через инвертор 34. Идентификатор 8 (19) состояния получая на свои входы сигналы с датчика положения S)v/ 5 (18) и с датчика частоты вращения двигате/хя 3 (1б)ыд5,формирует оценки скорости 5 и ускорения S перемещающегося механизма 4 (17), недоступных измерению. Сигналы, представляющие собой резуль тат сравнения переменных, предписьтаемых эталонной моделью 7, с реальными (положение) и восстановленными идентификатором состояния 8 (19) (скорость и ускорения перемещающегося механизма) с выходов блоков 9, 10, 11 (2О, 21, 22) сравнения поступают на блок 12 (23 масштабных коэффициентов, на выходе которого формируется линейная комбинация этих разностей с коэффициентами, выбранными из условия обеспечения устойчивоети устройсгва. Эталинейная комбинация через нелинейный усилитель 13 (24) поступает на второй вход привода 2 (15), чем обеспечивается синхронное движение механизмов, следящих за движением, пред письюаемым общей для обоих каналов эталонной моделью 7. Таким образом, в предлагаемом устройстве синхронное перемещение механиз- , vioB обеспечивается за счет сравнения переменных, предписываемых эталонной моделью, с переменными механизма в каждом канале, что позволяет повысить точность и быстродействие предлагаемого устройства по сравгтению с устройством (1) и устройствами, в частности (З), где 0 8 синхронное движение каналов обеспечивается путем взаимного влияния каналов. Формула изобретения Устройство для управления сшсхронно перемешающимися механизмами станка, содержащее блок задания перемещения и по числу механизмов - каналы регулирования, каждый из которых содержит Л блоков сравнения, последовательно соединенные расположенный на механизме датчик положения, регулятор положения, привод. датчик частоты вращения двигателя, идентификатор состояния, последовательно соединенные блок масштабных коэффициентов, нелинейный усилитель, подключенный выходом к второму входу привода, третий вход которого соединен с выходом датчика частоты вращения двигателя, первый, второй, .. .,п -1 и п -и входы блока масштабных коэффициентов подключены соорветстврнно к выходам первого, второго, ...,-п-1 и п -го блоков сравнения, первый вход первого блока сравнения соединен с выходом датчика положения и с вторым входом идентификатора состояния, п -1 выходов которого подключены соответст- венно к первым входам второго, третьего, ..., П -1 и п -го блоков сравнения вторые входы регуляторов положения каждого канала соединены с выходом блока задания перемещения, отличающееся с целью повышения быстродействия и точности устройства, оно содержит общую для всех каналов эталонную модель, первую, второй, ...,П -1 и П-и выходы которой подключены к вторым вхо первого, второго,..., п -1 и П чо блоков сравнения каждого канала, а вход соединен с выходом блока задания перемещения. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР N9 739477, кл. G О5 В 19/18, 1979. 2.Авторское свидетельство СССР № 584446, кл. G,O5 Б 11/32, 1978. 3.Патент ФРГ № 1285О46, кл. 21 Q 62/ЗО, опублик. 1970 (прототип).
.l


| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления | 1978 |
|
SU697974A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU928300A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1160365A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1984 |
|
SU1285953A1 |
| Устройство для управления электроприводом | 1982 |
|
SU1061105A1 |
| Многоканальное устройство функционального контроля | 1988 |
|
SU1596311A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РЕЖУЩЕГО ИНСТРУМЕНТА ПРИ ОБРАБОТКЕ ДЕТАЛЕЙ НА СТАНКЕ | 2010 |
|
RU2432233C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Система управления | 1978 |
|
SU798712A1 |


Риг. 2. rO Hh
