Изобретение относится к контрольн измерительной технике и автоматике и Moxet буть применено в системах автоматического управления, регулирования и контроля, в частности в устройствах для контроля и регистрации шнёйных перемещений подвижных объектов С ограничённьы участком передвижения. ,..-,. /;-.
Известно устройство для измерения скорости подвижного объекта, содержащее генератор возбуждения, усилитель мощности и передавшую антенну, две приемные антенны,выполненные в виде совмещенных рамочных контуров треугольной формы, расположенные встречно по отношен одна к другой, и два измерительных канала, выполненных на преобразователях частотног сигнала в потенциальный с приемн1 т антеннами на входах, подключенных к блоку сравнения
Недостатком данного устройства является зависимость вюсоднргр сигнала от зазора между перестающей и приемными антеннами, а следовательно от случайного изменения амплитуды
и МО1ДНОСТИ сигналов с передающей антенны и вибрации при пёредвиженш подвижного объекта, что снижает точность контроля.
Наиболее близким к Изобретению по технической сущности лвляётся устройство для контроля местоположения подвижного объекта, содержащее последовательно соединенные генерато усилитель и расположенную в зоне перемещения объекта передаюв(ую антенну, две приемные антенны, каждая из которых пЬдк)гючена к входу соответствукщего детектора, выходы которых соеданёны с входами сумматора аналоговых сигналов, выход которого является выходом устройства, приейные антенны выполнены в виде контуров клинообразной формы, сужаювдЕхся к началу зойы перемещения и расположенных i параллельных плоскос йх, между которыми помещена передаюв ая антенна, вшюлнеиная в виде, врямо угольного контура И жестко связан ная с подвижщш объект ж |;23. ,. Недостатком известного устройства является зависимость fiteocoffii&ro сигнала от влияния боковых сторон контура передающей аитейны, что вяот сит в преобразование погрешюетъ к поэтому влияет на точйость контроля местоположения подвижного объекта |
Цель изо бретения - повышение точности устройства.
Поставленная цель достигается тем, что в устройстве для контроля местоположения подвижного объекта, содержащем последовательно соединенные генератор, усилитель и расположенную в зоне перемещения объекта передающую антенну, две приемные антенны. Каждая из которых подключена к входу соответствукщего детектора, выходы которых соединены с входами сумматора аналоговых сигналов, выход которого является выходом устройства, приемные антенны выполнены в виде контуров клинообразной формы, сужаю1щихся к началу зоны перемещения объекта и расположенных в параллельных плоскостях, между которыми помещена передающая антенна, выполненная в виде контура и жестко связанная с подвижньм объектом, одни стороны контура переданной антенНы пересекающие проекцию сторон контуров приемных антенн, расположены ортогонально сторонам контуров приемньЬс антенн, другие стороны контура передающей антенны параллельны друг другу и оси симметрии контуров приемных антенн. -... ...-. ,,,
На чертеже изображена функциональная схема предлагаемого устройства.
Устройство содержит последовательно соёдинен{п 1е генератор 1, усилитель 2 и передающую антенну 3, кинематически связанну1о с подвижным объектом, стметричну относительно продольной осн симметрии преобразователя и . с боковыми частями, ортогональнь ш сужающимся частям двух идентичных и конгруэнтяых по форме и сужакицихся к началу системы отсчета приемных антенн 4 в виде клинообраз1а сх контуров, разнесенных в пространстве и расположенных друг под другом ,в параллельных плоскостях, два
детектора 5, выполненных на преV / . .. .... ,.,..../ ,,образоаателях частотных сигналов в
потенциальные с антеннами 4 на входах, сумматоров аналоговых сигналов, входы которого подсоединены к сортветствуиидая выводам.детекторов в выход подк/шчен к блоку 7 регистра -щш. . , - , .
Уст ройство работает следуюо$им образом.
Т При перемещении подвижного объекта, а вместе с ним передающей антенны 3, в каждой из приемных антенн 4 возбуждаются и те же по частоте и амплитуде сигналы в том случае когда антенна 3 расположена симметри но относительно двух а нтенн 4. В про тивном случае наблюдается увеличение амплитуды сигнала в одной антенне и уменьшение в другой на значения, рав ные по величине. Поэтому сигнал, суммы не зависит от расположения антенн 3 между антеннами 4. На выходную стч1тическую характеристику устройства не оказывают влияния части рамочного контура передающей антенны 3 ортогонального пространственно го расположения относительно сужакяци ся частей антенн 4 И1шуцируемые частотные сигналы в детекторах 5 пре образуются в потенциальные сигналы, пропорциональные внппнтуяам частотны сигналов. С цепью исключения воздействия внешних полей и помех плоские обмотки экранированы, а на входе детекторов стоят идентичные избирательные , настроенные на частоту генератора 1. , Преобразованные в потенциальные сигналы cy lмйpyюtcя в сумматоре 6 и на вькоде устройства получаем сигнал, характеризуюп91Й местоположение подвижного , а с помощью бло ка 7/производится регистрация значения местоположення в цифровой и/или. аналоговых формах. По прирдщению сигнала можно судит но направлении перемещения подвижного объекта. При положитех1ьном приращении объект перемещается от начал системы отсчета, а при отрицательном - к нему. В известн устройствах брковк стороны (участки) конту1С а передающей антенны воздействуют на сужающиеся част приемных антенн, что приводит не к простому увеличению (умень шению)выходйого сигнала, а к его измененюо на всем участке передвижения подвижного объекта. Это связано с -сем, что антеииы конечные и соизмеримые геометрические размеры. При перёме1цении рбмотки возбуждения меняется относнтепьное( неортогогнальноё) расположение участков контуров антенны 3 относительно контуров-антенн 4, что и приводит к иэменешво методической ошибки. Ортогональность боковых участков антенны 3 исключает этот недостаток, так как взаимодей твуювЕне отрезки при перемещении всегда остаются optoгональньми один относительно другого, что н приводит к исключению их влияния. , Изобретение обеспечивает повышение; точности контроля, шравнивание . и увеличение чувствительности преобразования механического перемещения в здектрический сигнал путем выбора формы контуров передающей и антенн. Это позволяет повысить точность управления подвижньм объектом и использовать эту информацию как в средствах автомати1ш, так и при проведении технологических непрерывных и дискретно-негферывных операЦий. , ,:; V ... , V . , - .- . . : .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля местоположения подвижного объекта | 1983 |
|
SU1124365A1 |
| Устройство для контроля местоположения подвижного объекта | 1984 |
|
SU1256071A1 |
| Компьютерная система дистанционного контроля и управления объектами жизнеобеспечения городской инфраструктуры | 2019 |
|
RU2733054C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ СОХРАННОСТИ ЭЛЕКТРОННОЙ ПЛОМБЫ-ЗАПОРА, ЭЛЕКТРОННАЯ ПЛОМБА-ЗАПОР И УСТРОЙСТВО ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ЕЕ СОХРАННОСТИ | 1998 |
|
RU2127911C1 |
| Устройство управления подвижным транспортным средством | 1985 |
|
SU1336081A1 |
| Устройство для контроля перемещения и местоположения транспортного средства | 1982 |
|
SU1237532A1 |
| СПОСОБ ОБНАРУЖЕНИЯ МЕСТОНАХОЖДЕНИЯ ЗАСЫПАННЫХ БИООБЪЕКТОВ ИЛИ ИХ ОСТАНКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2245733C1 |
| КОМПЬЮТЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОРТОВЫМ КОНТЕЙНЕРНЫМ ТЕРМИНАЛОМ | 2017 |
|
RU2656972C1 |
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ | 2012 |
|
RU2507555C2 |
| Устройство для регистрации движущихся объектов | 1984 |
|
SU1233074A1 |
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ 1УЕСТОПОЛОЖЕНИЯ ГОДВИЖНОГО ОёЪЕКТА, содерясащее последовлтельно соединенные .генератор, усилитель и расположенную в доне перемещения объекта передающую антенну и две приемных антенны, каждая из которых подключена К входу соответствующего детектора. выходы которых соединены с входами сумматора аналоговьк сигналов, выход которого является выходом устройства, приемные антенны выполнены в виде контуров клинообразной формы, сужающихся к началу зоны перемещения объекта и расположенных в параллельных плоскостях, между которыми помещена передающая антенна, выполненная в виде контура, отличающееся тем, что, с целью повьшения точности устройства, в нем одни стороны контура передающей антенны, пересекаюпдае проекцию сторон контуров приемных антенн, расположены ортогонально сторонам контуров приёмных антенн, другие стороны контура пере(Л дающей антенны параллельны друг другу и оси симметрии контуров приемных с антенн. CR .$. сл 00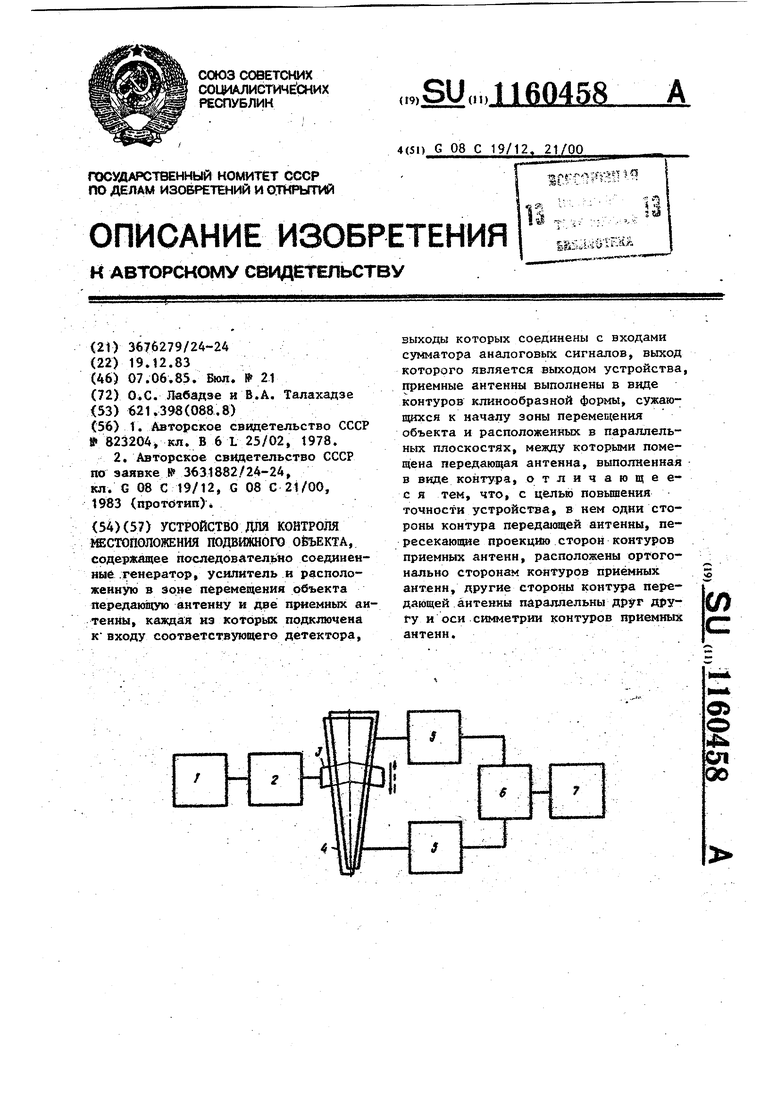
| Г | |||
| Устройство для чистки веретенных гнезд и веретенного бруса ватермашин | 1930 |
|
SU23204A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке 3631882/24-24, кл | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
