Злектрогидравлические следящие системы раздельного типа, обратимые по углу и усилию, состоящие из трех следящих систем, работающих в замкнутом контуре как единая следящая система, известны.
Предлагаемая следящая система отличается тем, что для облегчения управления задающим механизмом и повышения чувствительности в нем применены охваченные измерителем рассогласования вилка и поводок, образующие люфт, а с целью получения на задающем валу крутящего момента, пропорционального моменту на валу исполнительного механизма, применен гидроусилитель, следящий распределитель которого имеет отрицательное перекрытие со стороны слива и положительное - со стороны напорной магистрали.
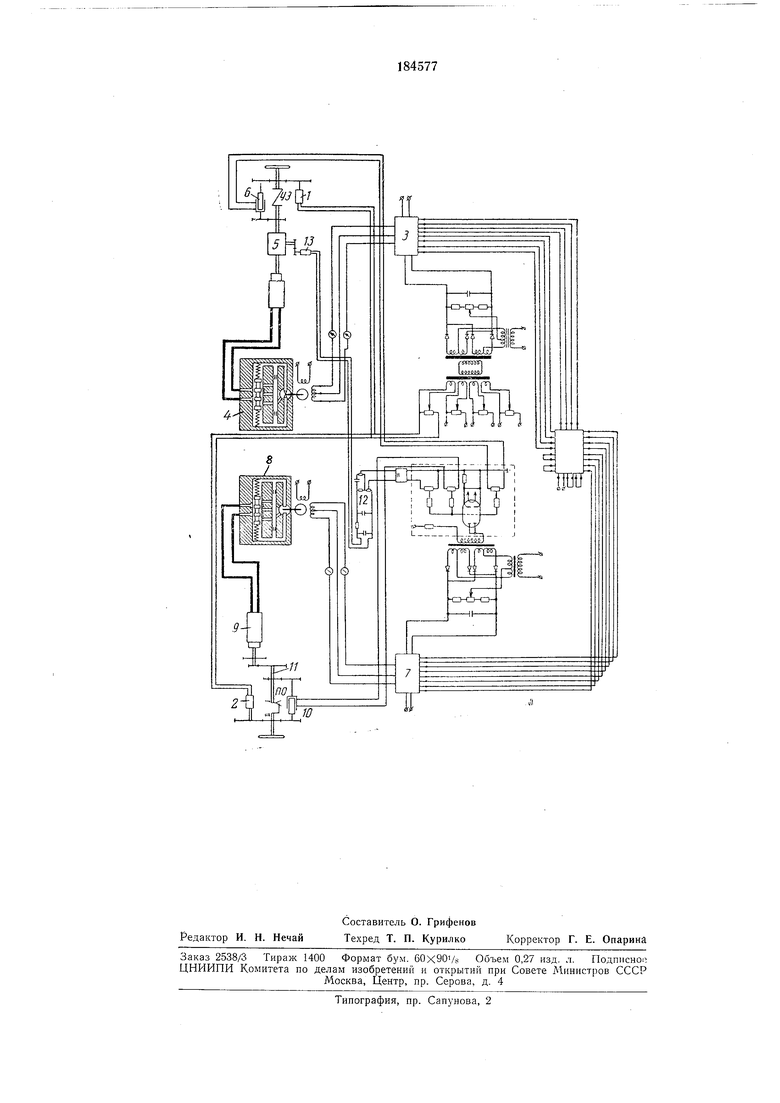
На чертеже показана схема электрогидравлической следящей системы.
Следящая система работает следующим образом. При вращении вала задающего механизма па управляющей обмотке сельсинаприемника ./ с помощью датчика-сельсина 2 возникает ток (напряжение) ощибки, поступающий в магнитный усилитель 3.
Ток управления преобразуется в механическое перемещеиие золотника, а затем в механическую энергию вращения вала гидродвигателя. Вал гидродвигателя исполнительного мехапизма через редуктор 5 поворачивает ротор сельсина-приемника / до тех пор, пока не исчезает ошибка рассогласования.
Передача момента от груза на валу исиолнительного механизма осуществляется следующим образом. Момент, приложенный к исполнительному механизму, деформирует упругий элемент УЭ, с концами которого связан ротор н статор вращающегося трансформатора 6.
С обмоток вращающегося трансформатора снимается ток (напряжение), пропорциональный углу деформации упругого элемента. Этот сигнал поступает в магнитный усилитель 7. Усиленный сигнал с усилителя 7 поступает
в электрогидравлический усилитель 8, где преобразуется в мехаиическое перемещеиие золотника, а затем в механическую энергию вращения вала гидромотора. Перемещение золотника прямо пропорционально току вращающегося трансформат.ора 6, а следовательно, и углу деформации упругого элемента УЭ. Поэтому на задающем валу механизма создается крутящий момент пропорциональный моменту, приложенному к иссил трения и преодоления крутящего момента, возникающего на валу гидродвигателя 9 за счет поднора жидкости на сливе, в систему введен компенсатор. Данный компенсатор включает в себя люфт. Задающ.нй вал разорван на две оси / и II, между которыми имеется люфт 6°. Ось / имеет поводок ПО, который при выборе люфта лол ;ится на уиор оси П, и вращающийся трансформатор 10, ротор и статор которого охватывают этот люфт, то есть соединены с осями / и //. Вращающийся трансформатор W выставляется таким образол, чтобы сигнал с него был равен нулю при среднем положении оси / относительно люфта.
При отклонении оси / от среднего положения люфта с вращающегося трансформатора 10 снимается сигнал, величина которого зависит от величины отклонения. Этот сигнал поступает в магнитный усилитель 7, а затем в электрогидравлический усилитель 8, где преобразуется в механическое перемещение золотника и энергию вращения вала. Вал гидродвигателя через редуктор 11 поворачивает ось I, восстанавливая среднее ноложение ее поводка относительно люфта.
Таким образом, компенсация трения осуществляется за счет слежепия оси / за положением оси //, то есть трение и момент в этой цепи преодолеваются гидроприводом, а не оператором.
Для уменьщения вязкого трения и ощибкн слежения в переходных процессах в схему введен дифферендирующий контур 12 с тахогеператором 13 постоянного тока, который выдает сигналы первой и второй производных от угла поворота выходного вала.
При резком увеличении скорости вращения 5 оси // сигнал с тахогенератора /5 поступает через демпфирующий контур в магнитный усилитель 7, где складывается с сигналом ощибки.
Ток, подводящий к электрогидравлическому 0 усилителю 8, возрастает и гидромотор 9 быстрее развивает требуемую скорость.
Предмет изобретения
1.Электрогидравлическая следящая система 5 раздельного тина, обратимая по углу и усилию, состоящая из трех электрогидравлических следящих систем, работающих в замкнутом контуре как единая следящая система, отличающаяся тем, что, с целью облегчения
0 управления задающим механизмом и повыщения чувствительности, в задающем механизме следящей системы, компенсирующей силы трения, применены охваченные измерителем рассогласования вилка и поводок, образующие
5 люфт.
2.Система по п. 1, отличающаяся тем, что, с целью получения на задающем валу крутящего момента, пропорционального моменту на валу исполнительного механизма, применен
0 гидроусилитель, следящий распределитель которого имеет отрицательное перекрытие со стороны слива и полол ительное со стороны напорной магистрали.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| ОБЪЕДИНЕННАЯ ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU347753A1 |
| Электрогидравлический усилитель системы управления гидравличесим прессом | 1976 |
|
SU582995A1 |
| Электрогидравлическая следящая система для манипулятора | 1958 |
|
SU116059A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2001 |
|
RU2220431C2 |
| ЭЛЁКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU407274A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА С АСИММЕТРИЧНЫМ ГИДРОПРИВОДОМ | 1973 |
|
SU407275A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1991 |
|
RU2010108C1 |