Предметом изобретения является индукционный датчик крутильных колебаний к инерционным электроторсиографам для исследования крутильных колебаний вала двигателей внутреннего сгорания (авиационных, тракторных и др.)Известные датчики крутильных колебаний, состоящие из электромагнита в качестве сейсмической массы и кольцевого сердечника с парными катушками обмотки, жестко скренленного с корпусом датчика, не обеспечивают возможности замены упругой связи между сейсмической массой и корпусом датчика центробежными силами инерции, возникающими при вращении датчика совместно с валом торсиографируемой м-тшин-ы, и установки датчика на труднодоступных участках вала.
Этот недостаток устранен в описываемом индукционном датчике крутильных колебаний тем, что сейсмическая масса выполнена в виде статически уравновешенного маятника, ось подвеса которого расположена в одной плоскости с осью вала торсиографируемой машины и наклонена к ней.
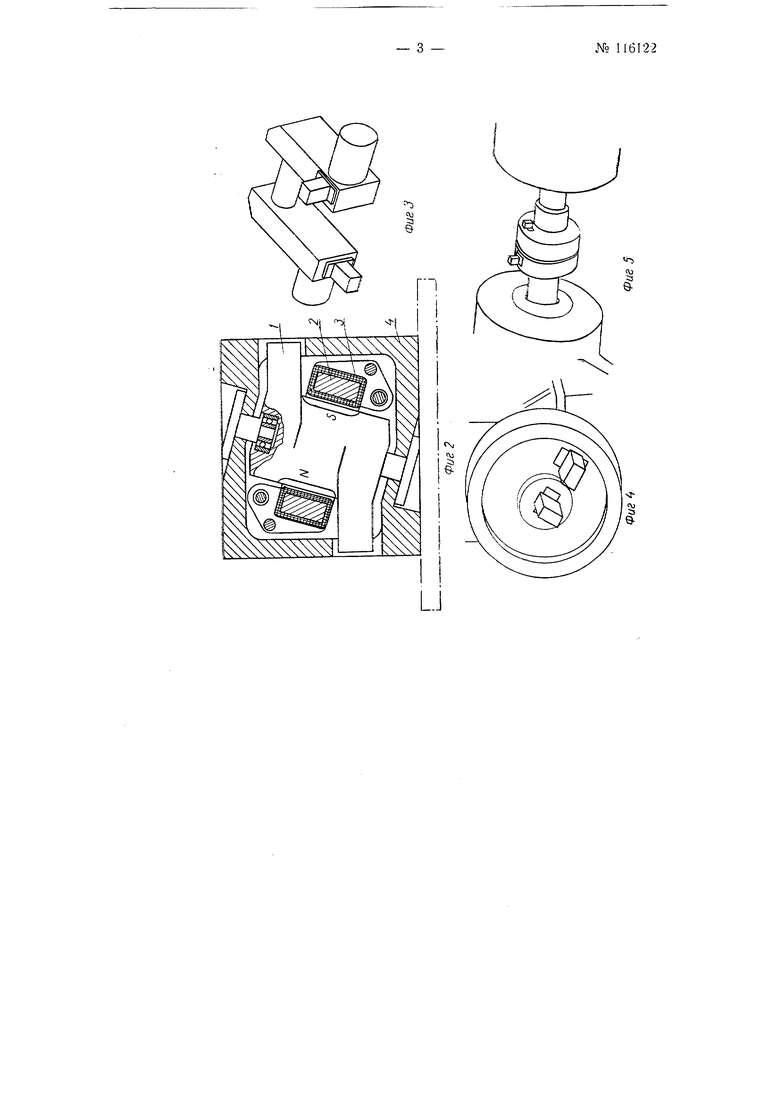
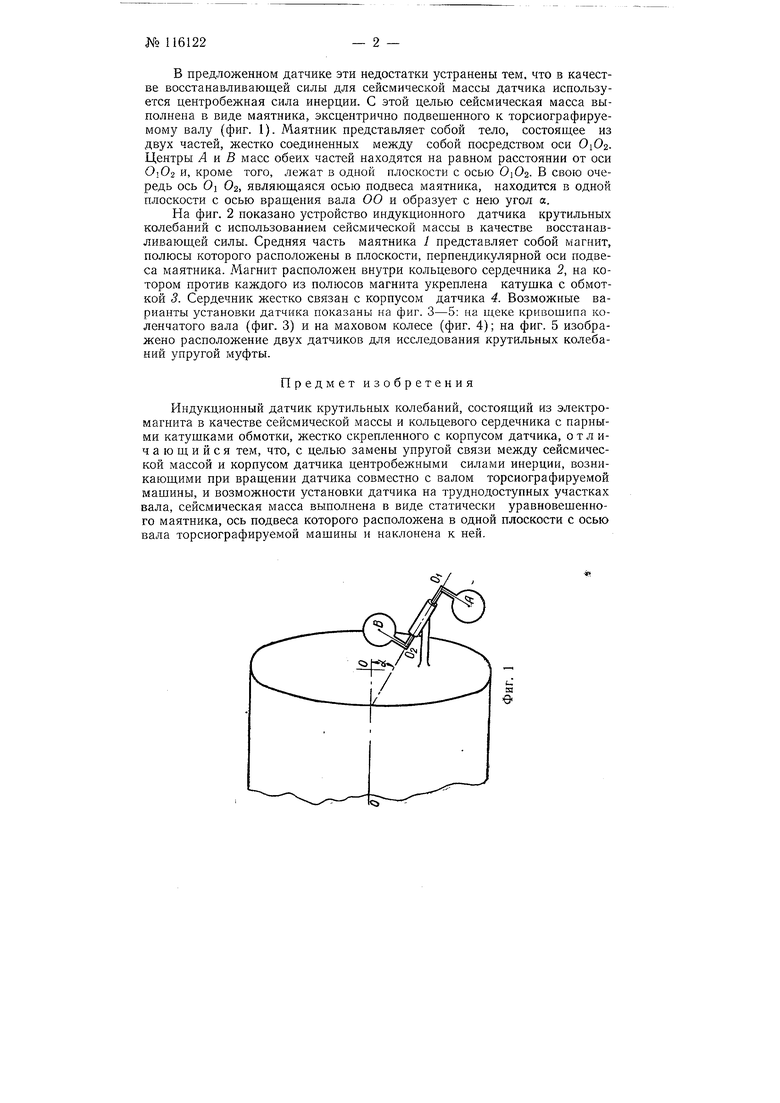
Фиг. I изображает принципиальную схему датчика, фиг. 2 - конструктивное выполнение датчика; фиг. 3-5 схемы размещения датчиков на торсиографируемых машинах.
В известных индукционных датчиках соединение сейсмической массы с валом осуществляется через упругую связь (пружину), которая сзязывает инерционный элемент с корпусом датчика (инерционных электроторсиографов). При таком выполнении сейсмической массы электроторсиограф обладает рядом существенных недостатков, а именно:
а)датчик прибора должен размещаться строго на оси торсиографируемого вала, что резко сужает возможности использования торсиографов;
б)прибор можно использовать только для записи колебаний, частота которых существенно превышает частоту собственных колебаний сейсмической массы.
В предложенном датчике эти недостатки устранены тем. что в качестве восстанавливающей силы для сейсмической массы датчика используется центробежная сила инерции. С этой целью сейсмическая масса выполнена в виде маятника, эксцентрично подвешенного к торсиографируемому валу (фиг. 1). Маятник представляет собой тело, состоящее из двух частей, жестко соединенных между собой посредством оси OiOg. Центры А к В масс обеих частей находятся на равном расстоянии от оси 0,02 и, кроме того, лежат в одной плоскости с осью OiO2. В свою очередь ось Oj 02, являющаяся осью подвеса маятника, находится в одной плоскости с осью вращения вала ОО и образует с нею угол а.
На фиг. 2 показано устройство индукционного датчика крутильных колебаний с использованием сейсмической массы в качестве восстанавливающей силы. Средняя часть маятника 1 представляет собой магнит, полюсы которого расположены в плоскости, перпендикулярной оси подвеса маятника. Магнит расположен внутри кольцевого сердечника 2, на котором против каждого из полюсов магнита укреплена катущка с обмоткой 3. Сердечник жестко связан с корпусом датчика 4. Возможные варианты установки датчика показаны на фиг. 3-5: на щеке кривошипа коленчатого вала (фиг. 3) и на маховом колесе (фиг. 4); на фиг. 5 изображено расположение двух датчиков для исследования крутильных колебаний упругой муфты.
Предмет изобретения
Индукционный датчик крутильных колебаний, состоящий из электромагнита в качестве сейсмической массы и кольцевого сердечника с парными катущками обмотки, жестко скрепленного с корпусом датчика, отличающийся тем, что, с целью замены упругой связи между сейсмической массой и корпусом датчика центробежными силами инерции, возникающими при вращении датчика совместно с валом торсиографируемой мащины, и возможности установки датчика на труднодоступных участках вала, сейсмическая масса выполнена в виде статически уравновешенного маятника, ось подвеса которого расположена в одной плоскости с осью вала торсиографируемой машины и наклонена к ней.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРАВИТАЦИОННЫЙ ВАРИОМЕТР | 2010 |
|
RU2438151C1 |
| ГРАДИЕНТОМЕТРИЧЕСКИЙ СЕЙСМОПРИЕМНИК | 2010 |
|
RU2439623C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА НАКЛОНА ПОДВИЖНОГО ОБЪЕКТА | 1993 |
|
RU2065572C1 |
| СЕЙСМОГРАФ | 1991 |
|
RU2030767C1 |
| Гравитационный вариометр | 1977 |
|
SU693325A1 |
| СПОСОБ ОПЕРАТИВНОГО ПРОГНОЗА ЗЕМЛЕТРЯСЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2507546C1 |
| ЛИНЕЙНЫЙ МИКРОАКСЕЛЕРОМЕТР | 2016 |
|
RU2629654C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2010 |
|
RU2485444C2 |
| АВТОНОМНЫЙ ПОПЛАВКОВЫЙ ОДНОГИРОСКОПНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ГИРОКОМПАСА | 1996 |
|
RU2120607C1 |
| Гироскопический указатель крена железнодорожных или иных вагонов | 1947 |
|
SU71757A1 |