о
У)
о
00
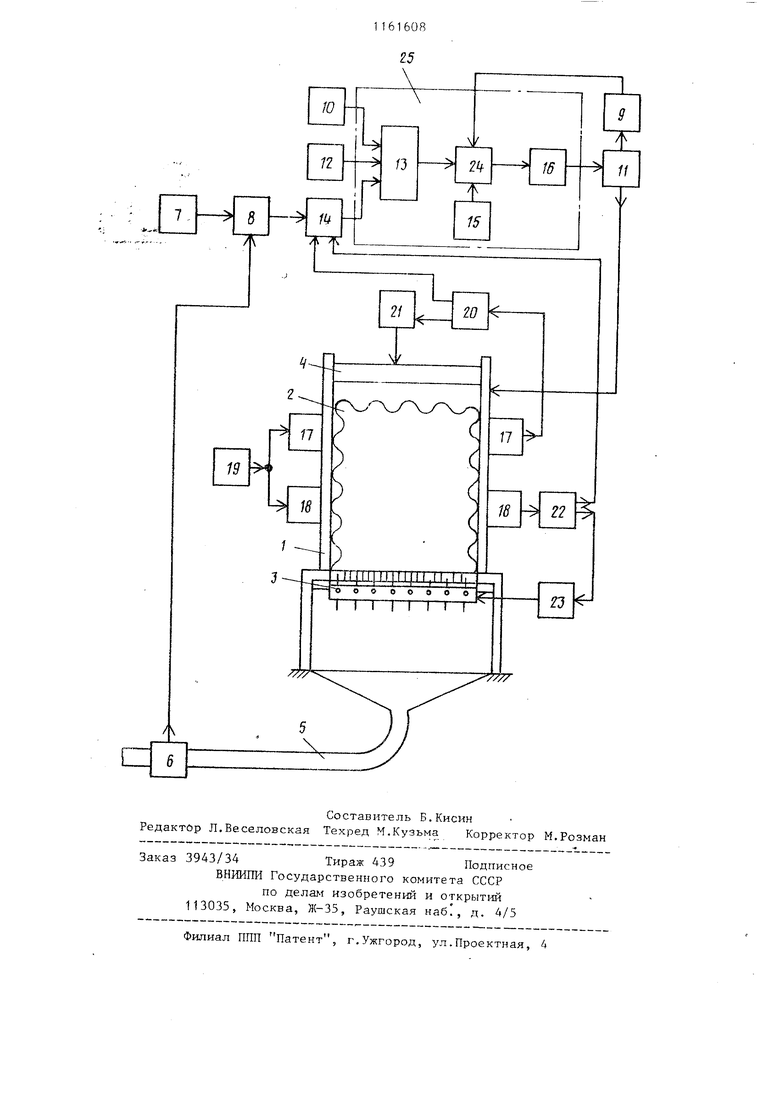
гортпрус I;:) к ,, г:.м::лите;пл10-т1нмталы)г--f ;г - : : .Г: 1моИ;)(.пол,. .) . (:Tt:oi4T;5o (.:о;де;)жи-г иаг;;:гк ; г; ,ггчик 7 п)ои-л; 0 пгг .ч.: и -i;oГ:: :;:|П; -а . tio;;Кли ч л лг г ; лл, i.;. :,-; лкрлия, |1Лг-:.;ч : :};. -I- К), ::,f) |л М i ( р(: ; 1;ч Л IГ- F- Л1 -:- - : .-. I ,i,iM,-.4;: М,.-;; тр,г,: -. ,,;,,..,,:. . . , .-..jM.- :р -ч:-| Г . ,, .: :,--,-I 1.; г -лии1и11,; чадаi:o,-o .-- п-м-;. f-r-,|-1---1 р-глт ..,-,.,..р ,.., -,j,,.,-.;.;j 1 ,-,,,.,,,,j,j,, ,,.-..г| ,--- --.-, ; ,:,,, ;л .,,,,.,,,..,, ,,.,,| :;-,.:,./ :-,,.: -jivi ЛЛИТ--.1 If .,,,,.;,, ,., J..J,,, .j,. ;-j -у:,; ,,,.;; i;.i:;}: r-/lг,. ) -,-,- : , :,.-.-т;.-р-,--MI ; -. ..,,,-,,,.;.,.,,.,,. Г; f:,}io--r.-: гг ;;, r-,,-;..:,-,i,j м ,iф - | ; г, - j f - t т - i - - ;;; гл 1; ;: .rv,- 1 ..,;-: -г:; -., - J-ЛЛ/Т: л; (л.; лллл; iii: ,i. -:,:i,t:-( /.лЛi л л iK;л-: лиглЛ с :о;л- Л.-гл члррек i ne, л),льллст;;, v -;л;дг,; с-л-лл;и с;лтчег лглгл1ло л,:Г|Чи-л i/ и ли/клсг-- id уп-лтс 515Л. ,o;i к;ллл;к- 4 роизло/л- V-y ; ..; ;.,л;ли1;;-. rvi ,, Ь lUpxneic 17 ypoHHefi VK;i-ii уиранлсния 22 -4Ht.-TrTi i toe;ui eiii. с прин.,;. 2 pwx4i4-(;j:r. органов н 21 r;l --ii4Ujfi ЛИТЫ COOTBGTCT( С J I ГЧЧ М . к-Mir-iiH.-.p 1 с кипами 2 соверпшет пр;Г; lici-пс {;-гупате: ьнос движение отм- :Ji 4:ib ;vj 15г,1л.:ите ЛЫ1ЫХ органов 3 ки;::Паз 1((;(ка. С помогцг ю блока 12 выЧта режима работы ус1ройства устам;;П/1инаегся регулирования скоос г и иep( контейнера 1 с кипа|-. :ря T(-i.f ьсиут ус:та авливаться г-;;-jvHvinio р(:лпмь; работы, автоматический, ко|--т).-)л устройством регулируется; скорость перемсг ч-ия /oiiTeinie ра 1 .1 образом, ipot 3ntb iiTe,.i,-:4or Т, кипораэборщи 1ЛОртимаг 1ся на определе)и1ом , г.-л-„ кгдалаогом задатчиком 7 прол-;i :,ит;.-/;,ло.Л м: проrpaNrMHoro уирав ; л;и. коглд. civojJOCTb контейнерз t i: Л11 о U;;1 б О Mit ик а регулирубтся ПО опрелу Г I I) И tгpoгpa Iмe, задан}юй в памяти логтулающей с раздичпых датчнкСВ, .р /гатчика числа работамвд-гх -:л; иых мапии, с задатчика количе: Г а хл(, } собход;в юго для работы -л ;-.,1-ата чесальиь х машин; ручной, устройством аптоматически поддерicniiaeTCH гюстояиная скорость переме контейнера 1 кипоразборщика гсзавис1-&ю ОТ Hai-рузки и других дестаби.тизируЮЦих факторов, которая Устаналливаетсл с иомошью зэ.датчи С К (1 р О С Т И призода перемещения .Чртейшра, иредстанляющего собой, лал11нг-;ер, 11е;)еключаталь с фиксированПЬИ-Л П О Л О Ж.Л КЯМИ . и;л. руч;гпм реж1-5ме регулирования , ,) элемент 13 коммут-ато,- /;, ;; ; iponyCKGCT ИНфорМаЦИ О с КОрлглгора 1А т;еличиггы задаНия производл . а пропускает сигнал ,- j;i; crjHua iO скорости привода перег.сл ;1:лг(-гя 5 который в сумма-r-j-ipe 2л c.t iF pyeтcя с сигналом фср rлpOIi-л л;; 1Ь лин1:Л но изменяющегося га л;я-ллгля. в фуикдиональном бло/.;,;. Л riii сигнзл пре обра зус тся ;; wirpc . л.-л-гмлульсный . КОТОРЫЙ воздействует на привод 1 1 и управляет скоростью nepeMenjeinm контейнера 1 . Лля болел устойчивой работы устройст д в мем да еется отрицательная об3ратная связь по скорости, для чего сигр1ал с датчика 9 скорости привода перемещения контейнера, связанного с приводом 11, поступает на вход ком мутатора 25 (на второй сумматор 24) Таким образом, с помощью задатчика регулируется скорость перемещения контейнера 1. При автоматическом режиме регулирования скорости перемещения контейнера 1 фактическая производительност кипоразборщика измеряется датчиком 6 производительности, сигнал с которого в элементе 8 сравнения вычитается из сигнала задатчика 7 производитель ности. Полученный сигнал рассогласования через корректор 14 величины задания производительности и комутатор 25, который в автоматическом режи - е не пропускает сигнал с задатчика 10 скорости привода перемещения контейнера, управляет работой привода 11 и регулирует скорость перемещения контейнера 1. При этом в начале срабатывания ставки кип поддерживается постоянной производительность кипоразборщика для каждого из значений задатчика 7 производительности. По мере срабатьшания ставки кип производительность кипоразборщика при определенной скорости перемещения контейнера убывает. В определенный момент производительность кипоразбор щика уменьшается настолько, что при максимальной скорости перемещения контейнера она имеет меньшее значение, чем максимальная величина производительности, установленная задат чиком 7 производительности, т.е. ста билизация производительности киперазборщика с помощью одного автоматического регулирования скорости перемещения контейнера не может 084 быть обеспечена в широком диапазоне производительности. В устройстве предусмотрены датчики верхнего 17 и нижнего 18 уровня ставки кип, которые питаются от блока 19 питания датчиков. Уровни установки датчиков могут изменяться. Они определяются из технологических соображений. При срабатывании датчика 17 верхнего уровня ставки кип сигнал посту пает в блок 20 управления привода 21 опускания грузовой плиты. При этом грузовая плита опускается на ставку кип, и разрыхлительная способность кипоразборщика увеличивается. Одновременно с датчика 17 верхнего уровня через блок 20 управления приводом опускания плиты поступает сигндл в корректор 14 величины задания производительности. В результате управление производительностью кипоразборщика в сторону больших значений задатчика 7 производительности. При дальнейшей разборке ставки производительность кипоразборщика будет вновь убывать. При достижении ставкой определенной высоты срабатывает датчик 18 нижнего уровня ставки кип и сигнал с него поступает в блок управления 22 приводом 23 рыхлительных органов. В результате 1 хлительные органы 3 переводятся на большую частоту вращения и производительность кипоразборщика 5 еличивается. Одновременно с датчика 18 через блок 22 управления приводом рыклительных органов поступает сигнал в корректор 14 величины .задания производительности, в результате в данном режиме управление производительностью кипоразборщика производится без искажений. 25
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования производительности и сдвига ставок кипоразборщиков | 1983 |
|
SU1112069A1 |
| Устройство для стабилизации производительности кипоразборщика | 1983 |
|
SU1112070A1 |
| Устройство для стабилизации производительности кипоразборщика | 1980 |
|
SU933828A1 |
| Способ регулирования производительности батареи кипоразборщиков и устройство для его осуществления | 1982 |
|
SU1060714A1 |
| Устройство для регулирования производительности кипоразборщика | 1983 |
|
SU1112068A1 |
| Устройство для стабилизации производительности кипоразборщика | 1982 |
|
SU1039994A1 |
| Устройство для регулирования производительности кипоразборщика | 1982 |
|
SU1063880A1 |
| Регулятор производительности кипоразборщиков | 1981 |
|
SU956643A1 |
| Регулятор производительности батареи кипоразборщиков | 1982 |
|
SU1049582A2 |
| Способ разборки кип волокнистого материала | 1983 |
|
SU1134629A1 |
1. УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ПРОИЗВОДИТЕЛЬНОСТИ КИПОРАЗБОРЩИКА, содержащее датчик и задатчик производительности, подключенные к соотеетствующим входам элемента сравнения, коммутатор, первым и вторым входами связанный с выходами соответственно задатчика и датчика скорости привода перемещения контейнера, и приводы рыхлительных органов и грузовой плиты,отличающ е с я тем, что, с целью расширения диапазона регулирования при сохранении требуемой точности стабилизации производительности, оно имеет датчики нижнего и верхнего уровней ставки кип и корректор величины задания производительности, при этом выход элемента сравнения соединен с первым входом корректора, величины задания производительности, второй и третий входа которого связаны с выходами соответственно датчиков верхнего и нежнего уровней ставки кип, а выход корректора величины задания производительности подключен к третьему входу коммутатора, причем выходы датчиков нижнего и верхнего уровней ставки, кип соединены с приводами соответственно рыхлиС тельных органов и грузовой плиты. 2. Устройство по п. 1, о т л ичающее ся тем, что корректор величины задания производительности выполнен в виде сумматора.
| Устройство для стабилизации производительности кипоразборщика | 1982 |
|
SU1039994A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
