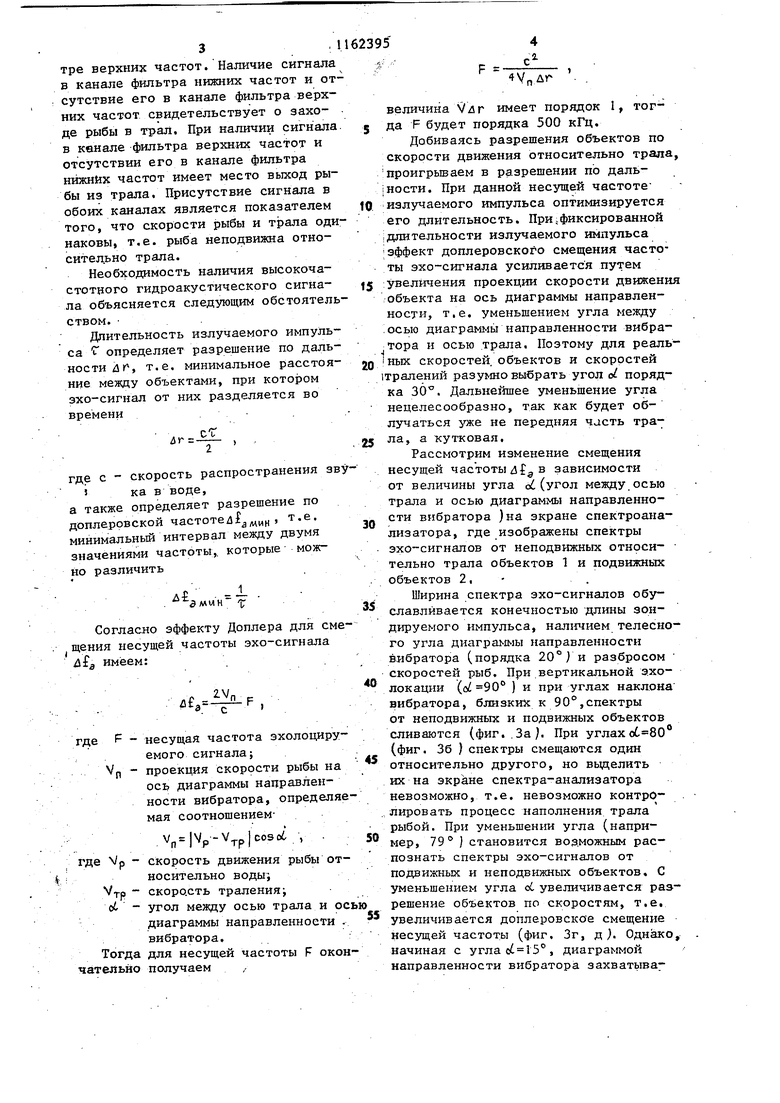
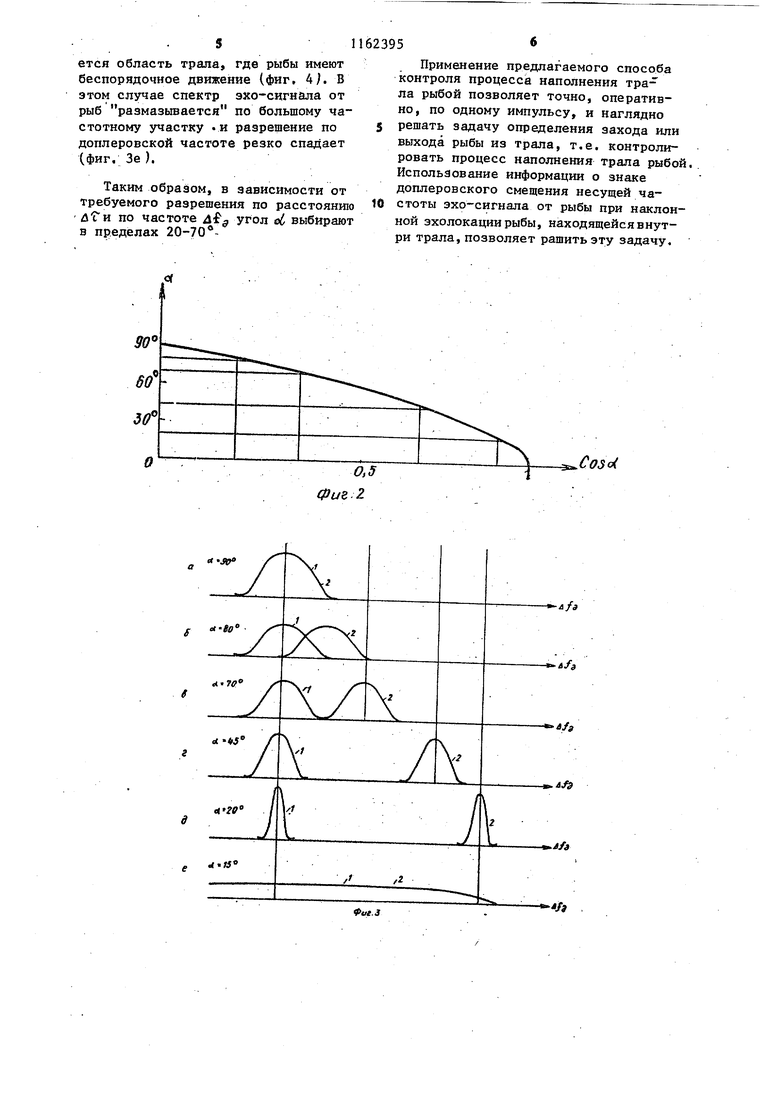
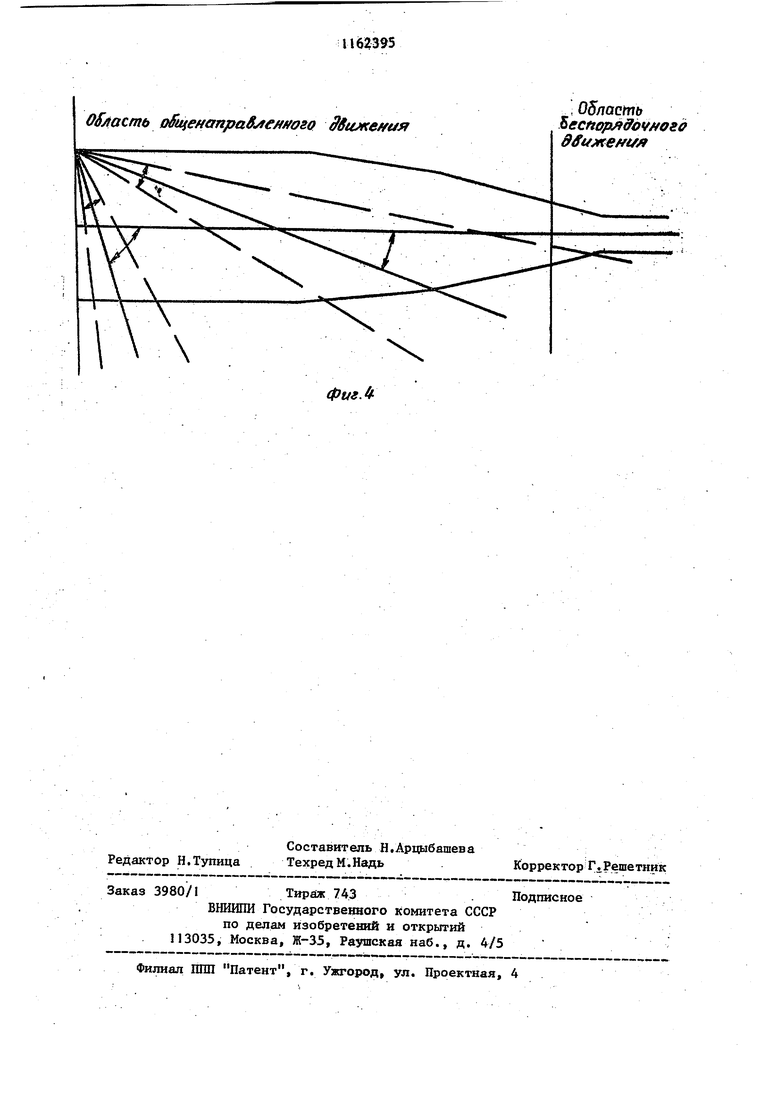
Изобретение относится к промышленному рыболовству, преимущественно к способам определения направления движения рыбы по отноше шю к тралу, . Известен способ контроля процесса наполнения трала рыбой, заключающийся в определении глубины хода трала, раскрытия трала, фиксировании рыбы, находящейся над, под и в устье трала, путем излучения гидроакустических импульсов в направлении вертикально вверх и вниз, приема отраженных сигналов, -их обработке и в фиксировании расстояНИЛ от верхней подборы трала до поверхности воды, до косяков рыбы и до нижней подборы трала в завнсимог сти от времени прихода эхо-импульса отраженного от соответствующего объ акта. Способ предполагает .крепление вибратора С вертикальной зоной излучения к верхней подборе Tpana Недостатком известного способа является невозможность достоверного определения захода рыбы в трал, а также распознавания факта захода рыбы в трал или выхода рыбы из трала, так как способ позволяет лишь констатировать относительное взаимоположение косяка рыб и устья тра ла, но не позволяет определять направление и величину скоростн движе ния косяка рыб относительно трала и также контролировать процесс наполнения трала.рыбой, Цель изобретения - повышение точ ности контроля процесса наполнения трала .рыбой. Поставленная цель достигается , тем, что согласно способу контроля процесса наполнения трала рыбой, предусматривающему эхолокацию, последнюю осуществляют под углом внут трала и регистрируют эхо-сигнал на доплеровской частоте с последующим определением знака доплеровского смещения частоты, а процесс наполнения трала рыбой контролируют по знаку этого смещения. Знак доплеровского смещения несущей частоты определяет направле ние движения рыбы в трале. Наличие этой информации позволяет контролировать заход рыбы в трал или выход ее из трала, что дает достоверные данные о процессе наполнения трала рыбой. При положительном доплеровском смещении частоты эхо-сигнала от рыбы имеет место выход ее из трала., в случае отрицательного смещения заход рыбы в трал. На фиг. 1 показана блок-схема устройства для реализации способа; на фиг, 2 - график изменения смещения несущей частоты в зависимости от величины угла oi (угол между осью трала и осью диаграммы направленности вибратора ;на фиг. 3 - спектры эхо-сигналов от неподвижных и подвижных относительно трала объектов на фиг. 4 - диаграмма направленности вибратора. Устройство для осуществления предлагаемого способа состоит из высокочастотного генератора 1, вибратора 2, приемоусилительного прибора 3, фильтра 4 верхних частот, фильтра 5 нижних частот, двух детекторов 6 и 7 и двух индикаторов 8 и 9. . Высокочастотный генератор вырабатывает импульс посьшки с частотой заполнения порядка 500 Гц, который подается на вибратор, расположенньй на в.ерхней подборе трала и направленный внутрь, трала под углом к оси трала таким образом, что ось диаграммы направленности вибратора и ось трала составляют угол порядка 30. Поскольку эхо-сигналы от рыбы, находящейся внутри трала, различаются от эхо-сигналов от грунта и поверхности воды на временной оси, то предлагаемый способ применим в условиях придонного, донного и траления у поверхности моря. Применение высокочастотного датчика обуславливается необходимостью сохранить разрешение по расстоянию, добиваясь разрешения по скорости объектов. Сигналы от рыбы, находящейся в трале, вне трала, а также от грунта и от поверхности моря, различается за счет различного расстояния до вибратора. Рассеянный рыбами внутри трапа сигнал принимается вибратором и усиливается на частоте F приемоу с ил ит ел ьным прибором.. Далее сигнал поступает параллельно на фильтр нижних частот и фильтр верхних частот, имеющих частоту среза F. После фильтров сигнал детектируется и поступает на блок индикации, который индицирует наличие сигнала в фильтре нижних частот или в филь3тре верхних частот. Наличие сигнал в канале фильтра нижних частот и о сутствие его в канале фильтра верх них частот свидетельствует о захода рыбы в трал. При наличии сигнал в канале фильтра верхних частот и отсутствии его в канале фильтра нижних частот имеет место выход ры бы из трала. Присутствие сигнала в обоих каналах является показателем того, что скорости рыбы и трала од наковы, т.е. рыба неподвижна относительно трала. Необходимость наличия высокочастотного гидроакустического сигнала объясняется следующим обстоятел ством. Длительность излучаемого импуль са t определяет разрешение по даль ности i, т.е. минимальное расстоя ние между объектами, при котором эхо-сигнал от них разделяется во времени где с - скорость распространения з ка в воде, а также определяет разрешение по доплеровской частоте д, , т.е. минимальный интервал между двумя значениями частоты,, которые можно различить Согласно эффекту Доплера для см щения несущей частоты эхо-сигнала г , имеем: л э- с где F - несущая частота эхолоциру емого сигнала; VP - проекция скорости рыбы на ось диаграммы направленности вибратора, определя мая соотношением. где VP - скорость движения рыбы от носительно воды; VT-P - скорость траления-, 0 - угол между осью трала и о диаграммы направленности вибратора. Тогда для несущей частоты F око чательно получаем 5 . пД величина Улг имеет порядок I, тогда F будет порядка 500 кГц. Добиваясь разрешения объектов по скорости движения относительно трапа, проигрьтаем в разрешении по дальности. При данной несущей частоте излучаемого импульса оптимизируется его длительность. При.фиксированной длительности излучаемого импульса эффект доплеровского смещения частоты эхо-сигнала усиливается путем увеличения проекции скорости движения объекта на ось диаграммы направленности, т.е. уменьшением угла между осью диаграммы направленности вибратора и осью трала. Поэтому для реальных скоростей, объектов и скоростей тралений разумно выбрать угол о порядка 30°. Дальнейшее уменьшение угла нецелесообразно, так как будет облучаться уже не передняя часть трала, а кутковая. Рассмотрим изменение смещения несущей частоты в зависимости от величины угла i(угол между осью трапа и осью диаграммы направленности вибратора )на экране спектроанализатора, где изображены спектры эхо-сигналов от неподвижных относи- тельно трала объектов 1 и подвижных объектов 2, . Ширина спектра эхо-сигналов обуславливается конечностью длины зондируемого импульса, нали11ием телесного угла диаграммы направленности вибратора (порядка 20°) и разбросом скоростей рыб. При вертикальной зхолокации (о 90 ) и при углах наклона вибратора, близких к 90,спектры от неподвижных и подвижных объектов сливаются (фиг..3a При углахо6 80 (фиг. 36 ) спектры смещаются один относительно другого, но выделить их на экране спектра-анализатора невозможно, т.е. невозможно контрОлировать процесс наполнения трала рыбой. При уменьшении угла (например, 79° ) становится возможным распознать спектры эхо-сигналов от подвижных и неподвижных объектов, С уменьшением угла оС увеличивается разрешение объектов по скоростям, т.е. увеличивается доплеровское смещение несущей частоты (фиг. Зг, д. Однако, начиная с углао 15°, диаграммой направленности вибратора захватыва.51
ется область трала, где рыбы имеют беспорядочное движение (фиг, 4/. В этом случае спектр эхо-сигнала от рыб размазывается по большому частотному участку «и разрешение по доплеровской частоте резко спадает (фиг. Зе ).
Таким образом, в зависимости от требуемого разрешения по расстоянию лГи по частоте f угол ё выбирают в пределах 20-70 62395
Применение предлагаемого способа контроля процесса наполнения трала рыбой позволяет точно, оперативно, по одному импульсу, и наглядно
5 решать задачу определения захода или выхода рыбы из трала, т.е. контролировать процесс наполнения трала рыбой. Использование информации о знаке доплеровского смещения несущей частоты эхо-сигнала от рыбы при наклонной эхо локации рыбы, находящейся внутри трала, позволяет рашитьэту задачу.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ФИКСИРОВАННОЙ СПЕКТРАЛЬНОЙ ЗОНЫ, СВОБОДНОЙ ОТ ПОМЕХ ОТ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ В БОРТОВЫХ ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАТОРАХ | 2023 |
|
RU2834733C1 |
| Способ формирования улова в трале | 1983 |
|
SU1184496A1 |
| Система управления орудием лова | 1982 |
|
SU1083995A1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ ОТ СЛУЧАЙНЫХ РЕВЕРБЕРАЦИОННЫХ ПОМЕХ | 2008 |
|
RU2366973C1 |
| Способ определения дифференциальной уловистости орудий лова | 1989 |
|
SU1687188A1 |
| Устройство для наведения разноглубинного трала на глубину залегания косяка | 1975 |
|
SU728809A1 |
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ ПАРАМЕТРОВ ТРАЛА | 2010 |
|
RU2447458C1 |
| Прибор для определения курсовых углов корабля | 1960 |
|
SU140227A1 |
| Способ направления рыбы в зону облова трала | 1989 |
|
SU1741696A1 |
| Радиолокационный тренажер | 1980 |
|
SU875437A1 |
СПОСОБ КОНТРОЛЯ ПРОЦЕССА НАПОЛНЕНИЯ ТРАЛА РЫБОЙ,iпредусматрн Бающий эхолокацию, о т л и ч аю щ и и с я тем, что, с целью повы|шения точности, эхолокацию осуществляют под углом внутрь трала и регистрируют эхо-сигнал на доплеровской частоте с последующим определением знака доплеровского смещения частоты, а процесс наполнения . трала рыбой контролируют по йнаку этого смещения. а (Л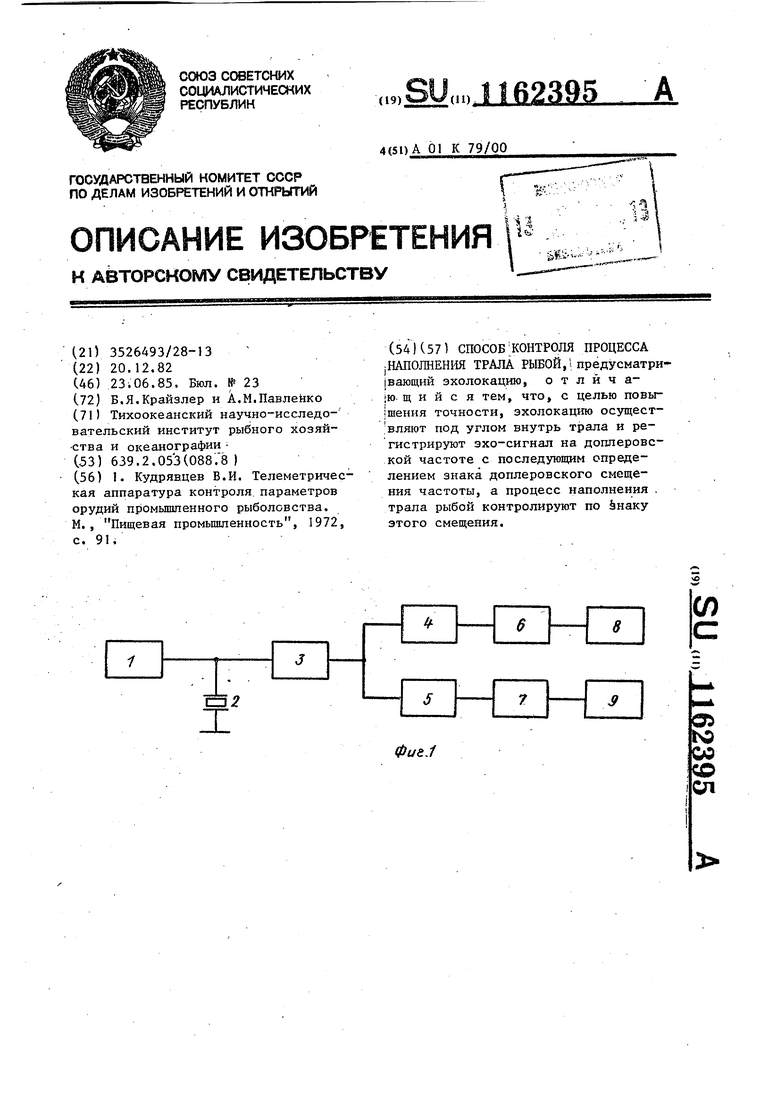
Фиг 2
.Соэо(
О,5
tt-SP
л/а
аto
ifa
л 70
-ifa
ot-W
.ifS
лго
t/a
jLd.
-tfi
Фиг.З OS Qcmtt oRtfe/tanpa8 €M/fosQ 9виже//е/я
Фиг Л OSnactnb SffCfftyMffOV/fffSff Sfftf efft/A
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кудрявцев В.И | |||
| Телеметрическая аппаратура контроля, параметров орудий промьшшенного рыболовства, М., Пищевая промьшшенность, 1972, с | |||
| Огнетушитель | 0 |
|
SU91A1 |
