Изобретение относится к области подшипниковой промышленности и может быть преимуш,ественно использовано для контроля качества изготовления подшипниковых узлов.
Целью изобретения является повышение точности контроля путем определения траектории оси вращения подшипника.
Цель достигается тем, что амплитуды радиальных колебаний измеряют в двух взаимно перпендикулярных направлениях и фиксируют в виде круговой диаграммы.
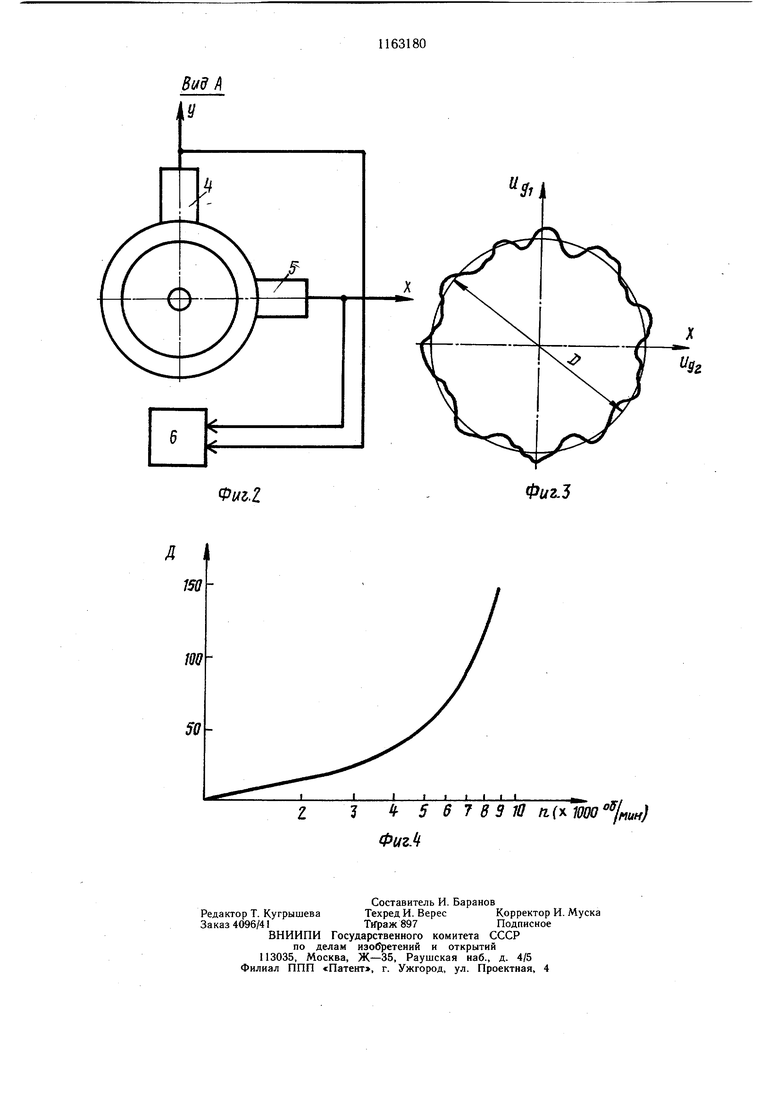
На фиг. 1 представлен подшипниковый узел, сечение; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - круговая диаграмма колебаний ротора, где Uo - амплитуда сигнала вибродатчика, установленного по оси V, Uo а - по оси X; на фиг. 4 - тарировочная характеристика, где D - средний диаметр круговой диаграммы, п - обороты ротора.
Функциональная схема содержит упругие опоры 1, подшипниковый узел 2, закрепленный на упругих опорах 1, ротор 3 подшипникового узла 2, установленный в подшипниках с газовой смазкой, а также вибродатчики 4 и 5, установленные на корпусе подшипникового узла 2 по двум ортогональным осям, и измерительный блок 6, к которому подключены вибродатчики 4 и 5.
Способ реализуется следуюш,им образом.
При врашении ротора 3 подшипникового узла 2 ось вращения ротора 3 из-за неравномерной радиальной жесткости газовых подшипников, а также под действием центробежной силы от дисбаланса и различной нагрузки совершает определенное движение в пространстве. Это вызывает ош.утимые погрешности при использовании подшипниковых узлов с газовой смазкой, например, в гироскопической технике, так как здесь
необходимо сохранять ось вращения ротора 3 неподвижной в пространстве, или знать величину ее отклонения.
Для определения траектории оси вращения ротора 3 окончательно собранного подшипникового узла 2 измеряют колебания корпуса упруго подвешенного узла 2 при помощи ортогонально установленных вибродатчиков 4 и 5. Воспринимаемые датчиками 4 и 5 колебания подаются на измерительный блок 6, в котором выделяется составляющая с частотой вращения ротора 3 (составляющая от дисбаланса ротора 3) и подается на осциллограф или двухкоординатный самопищущий прибор,
5 На индикаторе регистрирующего прибора получается круговая диаграмма колебаний с частотой вращения ротора 3, по которой можно судить о траектории оси вращения ротора 3 в пространстве. Средний диаметр этой диаграммы будет характеризовать
0 отклонение оси вращения ротора 3 от действия на ротор центробежной силы от дисбаланса, а переменная составляющая - от изменения радиальной жесткости подщипника или действующей нагрузки.
5 Для установления наличия смещения оси вращения ротора необходимо снять тарировочные характеристики - зависимость среднего диаметра круговой диаграммы от скорости вращения ротора 3 при постоянной величине дисбаланса для каждого подщип0 ника эталонного узла.
Таким образом, измерение колебаний корпуса упруго подвещенного узла на частоте вращения ротора и построение круговой диаграммы этих колебаний создает возможность определить наличие смещения оси
вращения ротора в пространстве и исключить погрещности, вносимые неровностями поверхности ротора подщипникового узла.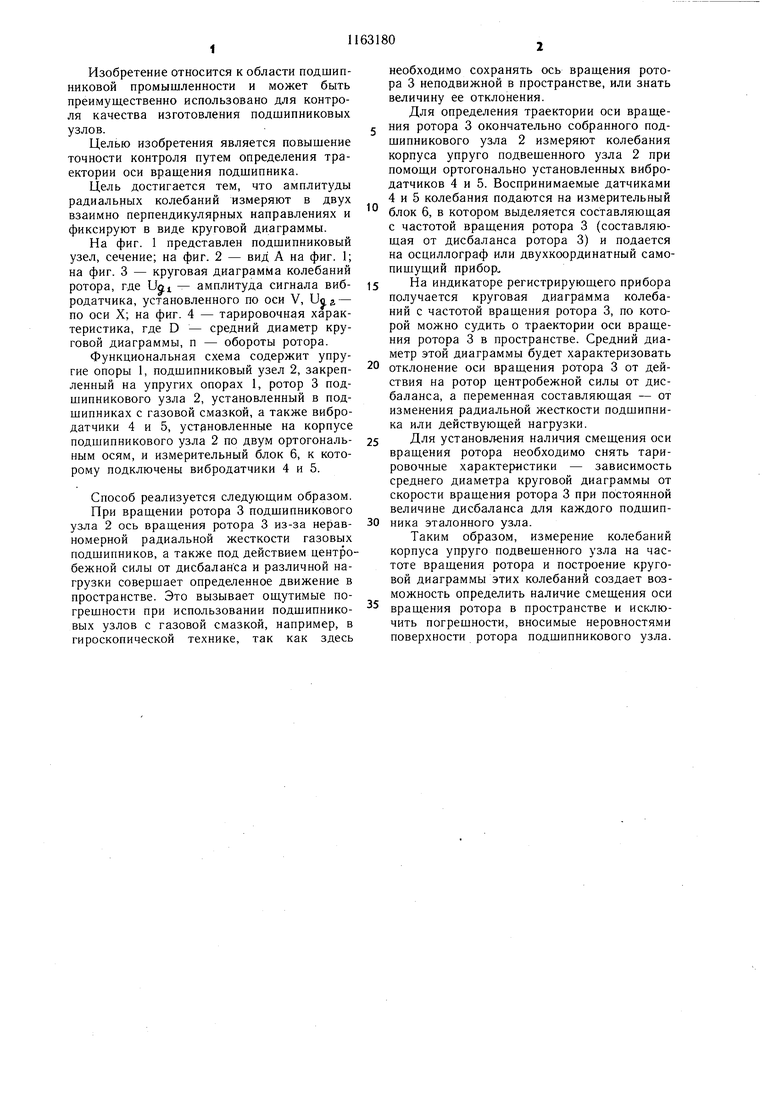
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля положения оси вращения роторов подшипниковых узлов | 1987 |
|
SU1506321A1 |
| Способ контроля технического состояния газопоршневого агрегата в эксплуатации | 2024 |
|
RU2837784C1 |
| СПОСОБ ВИБРАЦИОННОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДШИПНИКОВОЙ ОПОРЫ РОТОРА ДВУХВАЛЬНОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2551447C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЫСОКОСКОРОСТНЫМ МОТОР-ШПИНДЕЛЕМ МЕТАЛЛОРЕЖУЩЕГО СТАНКА | 2012 |
|
RU2509627C1 |
| Способ контроля шарикоподшипниковых узлов | 1987 |
|
SU1439436A1 |
| ВЫСОКОСКОРОСТНОЙ МОТОР-ШПИНДЕЛЬ ДЛЯ МЕТАЛЛОРЕЖУЩИХ СТАНКОВ | 2015 |
|
RU2587371C1 |
| ГРОХОТ ИНЕРЦИОННЫЙ С ОДНИМ ВАЛОМ | 2021 |
|
RU2788948C1 |
| Способ контроля подшипника роторной системы | 1990 |
|
SU1719953A1 |
| ЯСС ГИДРОМЕХАНИЧЕСКИЙ | 2004 |
|
RU2284405C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕДВАРИТЕЛЬНОГО ОСЕВОГО НАТЯГА ПОДШИПНИКОВЫХ ОПОР РОТОРА | 2014 |
|
RU2583337C2 |
СПОСОБ КОНТРОЛЯ КАЧЕСТВА ИЗГОТОВЛЕНИЯ ПОДШИПНИКОВЫХ УЗЛОВ, включающий непрерывное измерение амплитуды радиальных колебаний корпуса подшипникового узла на частоте вращения и контроль качества подшипникового узла по величине амплитуды и характеру ее изменения, отличающийся тем, что, с целью повышения точности контроля путем определения траектории оси вращения, амплитуды радиальных колебаний измеряют в двух взаимно перпендикулярных направлениях и фиксируют в виде круговой диаграммы. (р (Л О5 со 00
| Ковалев М | |||
| П., Моричаков С | |||
| П., Терехова К | |||
| С | |||
| Динамическое уравновешивание роторов гидроскопических систем | |||
| М., Оборонгиз, 1962, с | |||
| Спускная труба при плотине | 0 |
|
SU77A1 |
