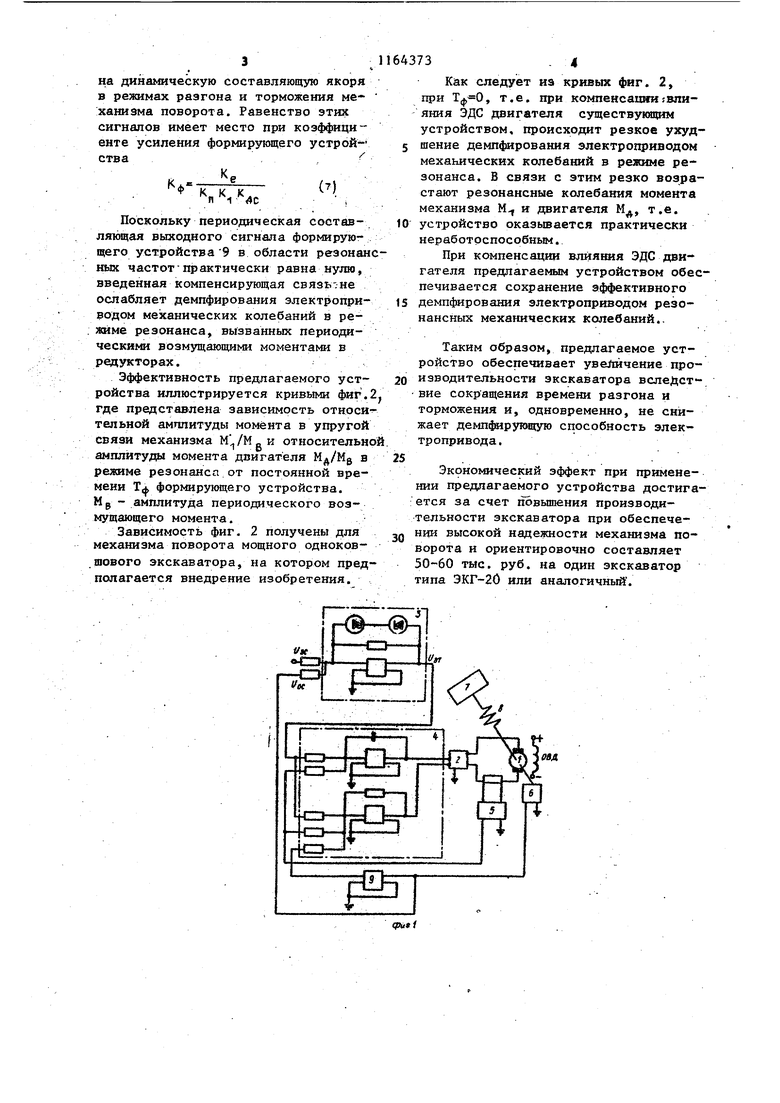
Изобретение относится к стрр теяьному и горному машиностроению, нагфимер к экскаваторам. Цель изобретения - сокращение speMetat переходных процессов за счет компенсаций влияния ЭДС двигателя. На фиг. приведена структурная схема предлагаемого устройства. Устройство для управления электроприводом поворота экскаватора содержит двигатель , подключенный к управляемому пдеобразователю 2, двух- . контурную систему 3 подчиненного регулирования с пропорциональным регулятором скорости, имеющим огра{шчение в цепи обратной связи, и про порционально-интегральным регулятором 4 тока, который содержит два параллельно включенных Операционных усилителя - пропорциональный и инте рирующий датчиками тока 5 и скорости ( ЭДС ) двигателя 6. Двигатель I через редуктор приводит во вращение поворотную платформу экскаватора 7, с которой связан упругой связью 8. Формирующее устройство 9, выполненное на операционных усилителях и имеющее передаточную функцию й-т Д- :.. подключено к пропорциональному операционному усилителю регулятора 4 тока, а его вход соединен с выходом датчика 6 скорости (ЭДС ) двигателя. Устройство работает следующим о.б разом. В процессе разгона и торможе кия формирунзщее устройство 9 осуществляет компенсацию влияния внутрен ней обратной связи по ЭДС двигателя на диIfti в чecкyю составляющую тока якоря, т.е. на время разгона и торможения . Эта компенсация происходит за сч того, что вход формирукнцего устройства 9 подключен к датчику 6 скорос ти двигателя, сигнал которого пропо ционапеЛ ЭДС двигателя Е, т.е. на выходе форми1.ующего устройства вырабатывается сигнал ..)- ч - Д7где коэффициент усиления датчика 6 скоростиi Kg - ко,эффициент пропорциональности мелзду ЭДС двигателя Ед и скоростью двигателя. Выходной сигнал датчика 6 скорости содержит две составляющие - основHyjD, пропорциональную средней скорости двигателя, и дополнительную, периодическую, обусловленную возмущающими моментами в редукторах. Постоянные времени Тф формйрукяцего устройства оказывают влияние только на периодическую составляющую выходного сигнала датчика 6 скорости, которая в зоне резонанса является относительно .высокочастотной. Вместе с тем, постоянные времени Т не оказывают практически влияния на основную составляющую сигнала датчика скорости (пропорциональную средней скорости двигателя), поскольку эта сост авляющая медленно нарастает в процессе разгона практически по линейному закону. Поэтому для основной составлякяцей сигнала датчика б скорости напряжение на выходе форьмрующего устройства определяется приблгекенной зависимостью u. Выход формирующего устройства подключен к пропорциональней опеpaiyjoHHOMy усилителю регулятора 4 тока, поэтому на выходе этого усилителя при введении предлагаемого способа компенсации ЭДС двигателя появляется дополнительньй сигнал лирт- иф где К - коэффициент усиления пропорционального усилителя регулятора тока. Этот сигнал проходит через тиристорный преобразователь 2 с передаточной функцией V(/{p)- (.5) nW ,рт- V Без учета влияния малой постоянной времени Т получают уравнение для сигнала на выходе преобразователя 2, осуществляющего компенсацию влияния ЭДС двигателя ,К,,Сигнал 4 Up по формуле (б ) равен по величине ЭДС двигателя Е и имеет обратный знак, т.е. компенсирует влияние противо-ЭДС двигателя на динамическую составляющую якоря в режимах разгона и торможения механизма поворота. Равенство этих сигналов имеет место при коэффициенте усиления формир5пощего устрой ства N Ас Поскольку периодическая составляющая выходного сигнала формирующего устройства 9 в области резонан ных частотпрактически равна нулю, введенная компенсирующая связьхне ослабляет демпфирования электроприводом механических колебаний в режиме резонанса, вызванных периодическими возмущающими моментами в редукторах. Эффективность предлагаемого устройства иллюстрируется кривыми фиг. где представлена зависимость относи тельной амплитуды момента в упругой связи механизма относительн амплитуды момента двигателя в режиме резонанса от постоянной времени Тф формирующего устройства. Мр - амплитуда периодического возмущающего момента. Зависимость фиг, 2 получены для механизма поворота мощного одноковшового экскаватора, на котором пред полагается внедрение изобретения.
f-;
гФ-
08Л 73. 4 Как следует из кривых фиг. 2, при , т.е. при компенсашга влияния ЭДС двигателя существуимцим устройством, происходит резкое ухудшение демпфирования электроприводом механических колебаний в режиме резонанса. В связи с этим резко возрастают резонансные колебания момента механизма М и двигателя М, т.е. устройство оказьшается практически неработрспособньм. При компенсации влияния ЭДС двигателя предлагаемым устройством обеспечивается сохранение эффективного демпфирования электроприводом резонансных механических колебаний.. Таким образом, предлагаемое устройство обеспечивает увеличение производительности экскаватора вследствие сокращения времени разгона и торможения и, одновременно, не снижает способность электропривода. Экономический эффект при применении предлагаемого устройства достигается за счет повышения производительности экскаватора при обеспечении высокой надежности механизма поворота и ориентировочно составляет 50-60 тыс. руб. на один экскаватор типа ЭКГ-20 или аналогичный .
0.1 0.2 03 0Л
МД
70
60 50
0 30 2Q 10
0.1 0.2 О.Ъ OA
) (pue.Z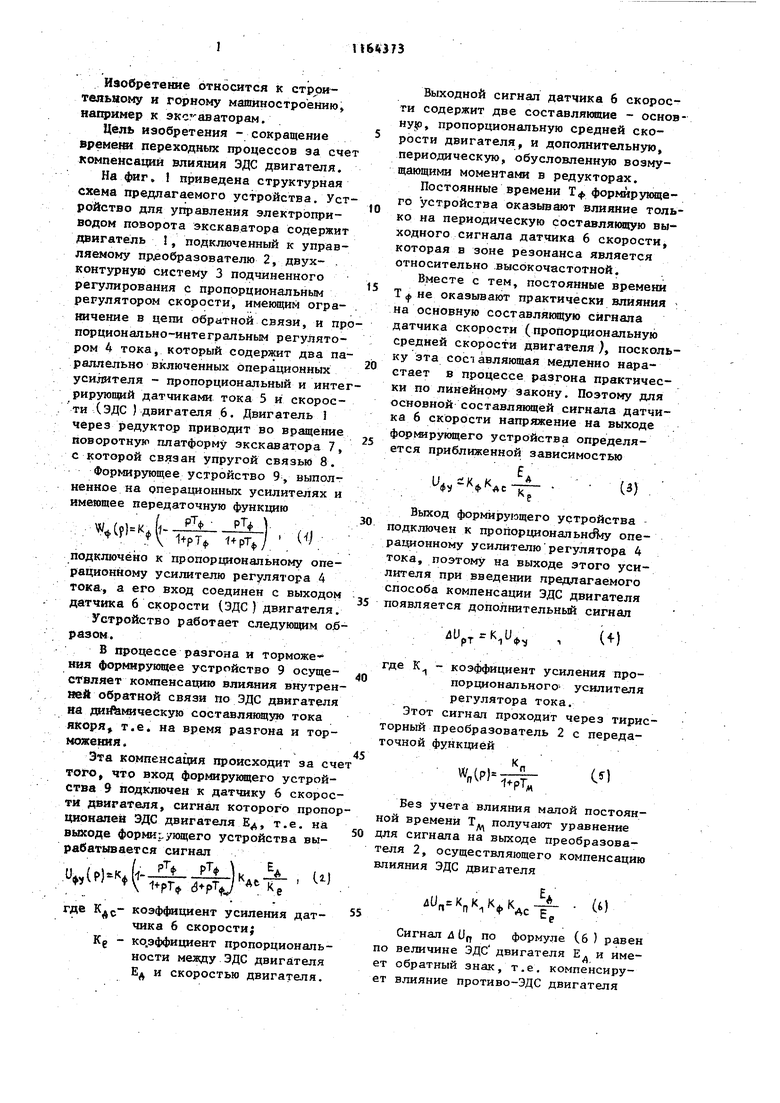
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводом поворота экскаватора и устройство для его осуществления | 1986 |
|
SU1416626A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Устройство для управления электроприводом поворота экскаватора | 1979 |
|
SU874909A1 |
| Устройство для ограничения и демпфирования нагрузок в двухдвигательном электроприводе поворота экскаватора | 1985 |
|
SU1273462A1 |
| Способ регулирования скорости электропривода многомассовой системы | 1991 |
|
SU1820470A1 |
| Электропривод | 1982 |
|
SU1084934A1 |
| Электропривод постоянного тока | 1990 |
|
SU1786628A1 |
| Устройство управления летучими ножницами с механизмом выравнивания скоростей | 1989 |
|
SU1682058A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД СУПЕРКАЛАНДРА | 1997 |
|
RU2131641C1 |
| Устройство управления процессом выбора зазоров в многодвигательных электроприводах поворотных механизмов экскаваторов | 1981 |
|
SU1015053A1 |

УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОВОРОТА ЭКСКАВАТОРА, содержащее двигатель постоянно-в го тока, подключенный через датчик тока к тиристорному преобразователю, датчик скорости, соединенный с двигателем постоянного тока и подключенный через регулятор скорости к первому входу пропорционально-интегрального регулятора тока, второй вход которого подключен к датчику тока, отличаю5цееся тем, что, с целью сокращения времени переходных процессов за счет компенсации влияния ЭДС двигателя, устройство снабжено блоком компенсации динамической составляющей тока с обратной связью, вход которого подключен к датчику скорости, а выход - к третьему входу пропорционально-интегрального регулятора тока, который выполнен на двух параллельно включенных операционных усилителях (П интегральном и пропорциональном, подключенных соответственно к первому и второму входам тиристорного преобразобателя, при этом выход датчика тока соединен с четвертым входом пропорхщонально-интегрального регулятора тока. о: 4ib ОО 09
| Лебедев Е.Д | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| М., Энергия, 1970 | |||
| Реферативный научно-технический, | |||
| сборник | |||
| Электротехническая проммиленность | |||
| Сер | |||
| электропривод, 1975, 6 141 ).. | |||
