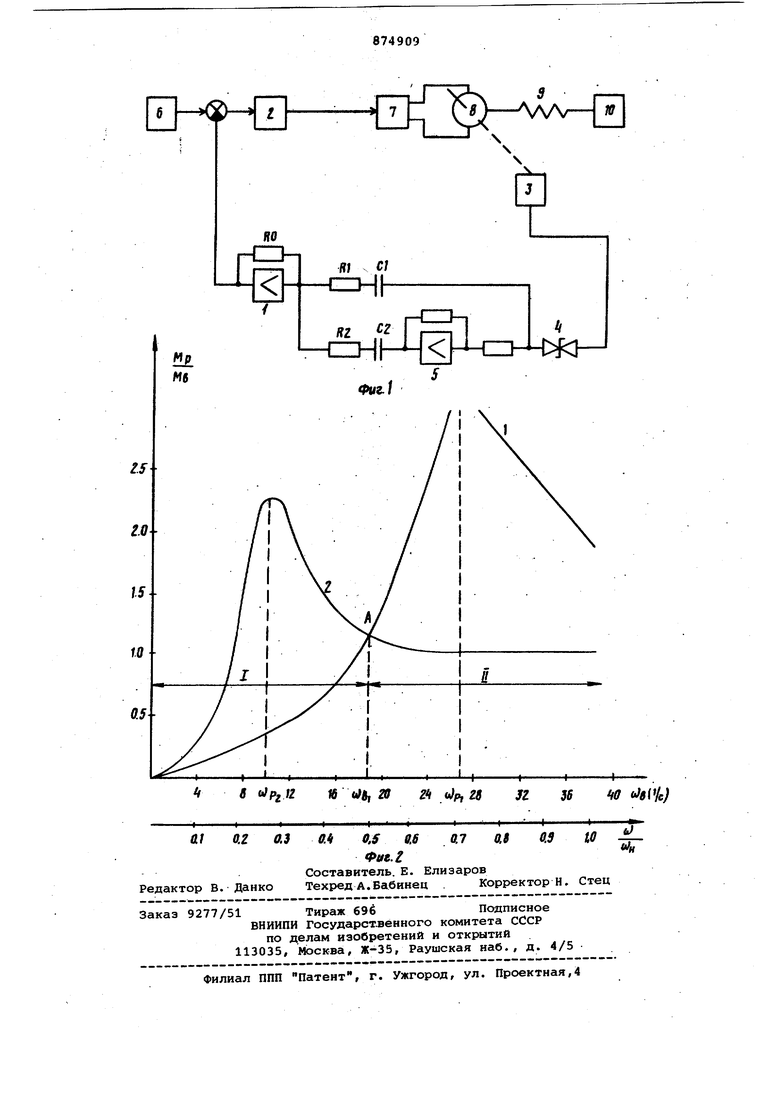
фиг.2 отложено отношение амплитуды момента в упругой связи механизма Мр к амплитуде возмущающего момента Мд. Устройство для управления электро приводом поворота экскаватора содержит дифференцирующий усилитель 1, выход которого соединен со входом регулятора 2 тока. Усилитель 1 имеет два входа, которые подключены к дат чику 3 скорости через стабилитрон 4 и инвертор 5. Регулятор 2 тока, вход которого соединен с регулятором 6 скорости, подключен к системе импульсно-фазового управления .тиристор ного преобразователя 7. Напряжение тиристорного преобразователя подается на двигатель 8, кинематически связанный через упругую связь 9 (редуктор) с поворотной платформой 1 Устройство работает следуквдим об разом. На первом этапе разгона механиз-ма стабилитрон 4 заперт, так как напряжение с выхода датчика 3 скорос ти , пропорциональное частоте возмущающего момента (Ug. меньше tC, соответствующей допустимому моменту в механизме. При этом амплитудно-частотная характеристика системы соответствует кривой 1 (фиг.2). Резонанс ная частота колебаний электромеханической системы cJWp .Ha участке 1 частота возмущающего момента (JL}g меньше резонансной частоты Шр,т.е. система работает в дорезонансной области кривой l() При достижении частоты вращения платформы tts B-t стаб-илитрон проби вается, и к регулятору тока 2 подключается дифференцирующий усилитель 1 с цепочкой на одном входе и цепочкой 2. и инвертором на другом входе. При прохождении сигнала с датчика 3 скорости через стабилитрон 4 и дифференцирующий усилитель 1 на. вход регулятора тока амплитудно-частотная характеристика электромеханической системы соответствует кривой 2 (фиг.2). Резонансная частота колебаний электромеханической системы для кривой 2 соответствует .е. на участке )I частота возмущающего момента (fgXjypg,следовательно система работает в зарезоНансной области кривой 2. При дальнейшем увеличении частот вращения платформы или установившем ся движении сигнал с датчика 3 скорости через стабилитрон 4 и усилите 1 поступает на вход регулятора тока и механизм поворота работает в зарезонансной области кривой 2. На первом этапе торможения стабилитрон открыт до , при дальнейшем снижении (i)- стабилитрон закрывается, амплитудно-частотная характеристика системы соответствует кривой 1, и механизм поворота работает в дорезонансной области. Таким образом, в режимах разгона установившегося движения и торможения поворотной платформы исключается режим резонанса, амплитуда колебаний момента в упругой связи Мр не превышает допустимого значения, соответствующего точке А на фиг.2, т.е. устройство обеспечивает эффективное снижение динамических усилий и,таким образом, повышение надежности механизма поворота. Применение устройства для управления электроприводом поворота экскаватора существенно ограничивает динамические усилия в механизме, так коэффициент динамичности, т.е. отношение максимального момента к возмущающему моменту снижается в 2-3 раза. Это позволяет уменьшить вес механизма поворота. Одновременно с экономией металла в результате снижения динамических усилий увеличивается надежность и долговечность механизма поворота, уменьшаются затраты на ремонт оборудования, сокращаются простои и увеличивается эксплуатационная производительность экскаватора. Формула изобретения Устройство для управления электроприводом поворота экскаватора, выполненным по системе управляемый преобразователь-двигатель с двухконтурной системой подчиненного регулирования , содержащее регуляторы и датчики тока и скорости, отличающееся тем, что, с целью повьвиения надежности электромеханического оборудования механизма поворота, оно снабжено дифференцирующим усилителем, инвертором и стабилитроном, причем вход регулятора тока подключен к выходу дифференцирующего усилителя, один вход которого непосредственно, а другой через инвертор соединены со стабилитроном, подключенным к датчику скорости. Источники информации, . принятые во внимание при экспертизе 1.Волков Д. П. и Каминская Д.А. Динамика электромеханических систем экскаваторов, М., Машиностроение, 1971. 2.Авторское свидетельство СССР 418949, кл. Н 02 .Р 5/06, 1971.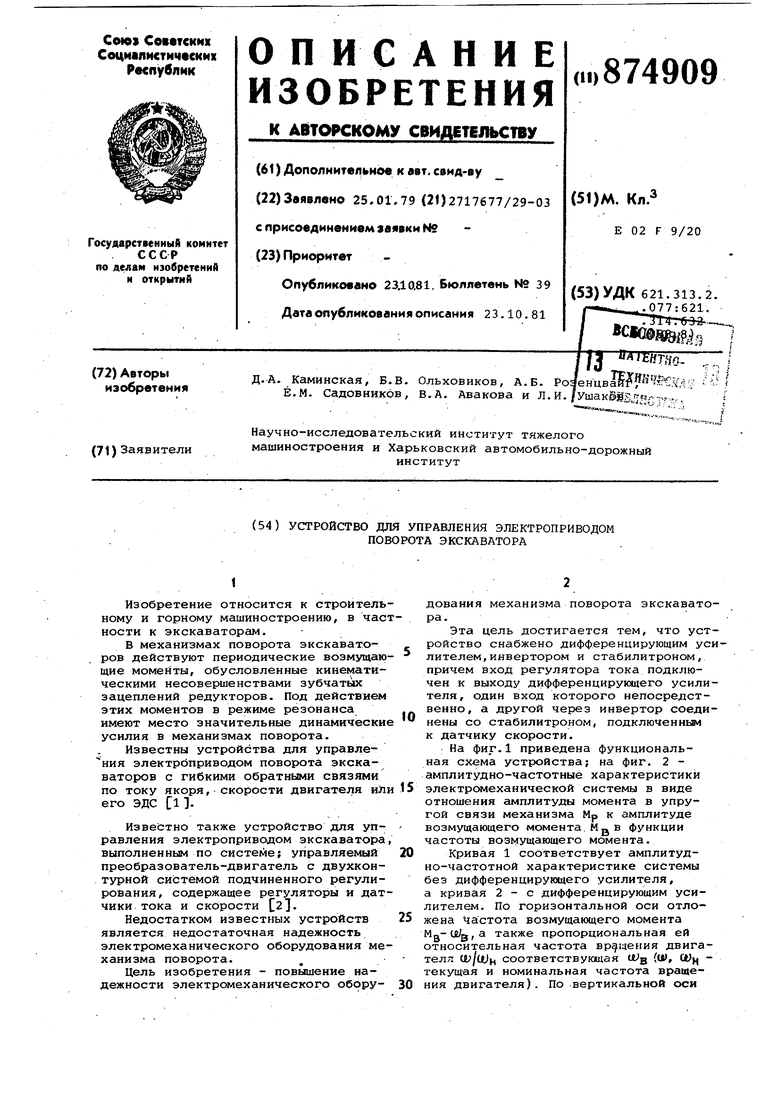

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводом поворота экскаватора | 1979 |
|
SU899805A1 |
| Электропривод | 1982 |
|
SU1084934A1 |
| Способ управления электроприводом поворота экскаватора и устройство для его осуществления | 1986 |
|
SU1416626A1 |
| Электропривод постоянного тока с упругой механической связью между электродвигателем и механизмом | 1985 |
|
SU1325654A1 |
| Устройство для управления резонансным объектом | 1979 |
|
SU781780A1 |
| Устройство для управления электроприводом поворота экскаватора | 1982 |
|
SU1164373A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И ПОДДЕРЖАНИЯ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2589639C1 |
| Устройство для ограничения и демпфирования нагрузок в двухдвигательном электроприводе поворота экскаватора | 1985 |
|
SU1273462A1 |
| Экстремальный регулятор для резонансного объекта | 1975 |
|
SU590695A1 |
| Устройство для управления электроприводом одноковшового экскаватора | 1979 |
|
SU926181A1 |