Изобретение относится к области автоматического управления и регулирования электроприводов механизмов, преимущественно циклического действия, содержащих упругие, гибкие и нелинейные кинематические связи..
Целью изобретения является повышение КПД за счет сокращения потерь энергии.
Для осуществления этой цели в известном способе регулирования скорости электропривода многомассовой системы, по которому задают среднюю скорость электродвигателя, измеряют мгновенные значения угловой скорости 1-й вращающейся массы, определяют значение средней скорости движения многомассовой системы и. сравнивают его с заданной средней скоростью электродвигателя и при наличии откло- нения формируют управляющее воздействие, обеспечивающее равенство значений заданной средней скорости электродвигателя и средней скорости движения многомассовой системы, дополнительно измеряют мгновенное значение скорости К- й поступательно движущейся массы, а среднее значение скорости движения многомассовой системы определяют на основе закона сохранения количества движения в соответствии с выражением:
иь
S jiuJ+imkVicrit
jnp
(1)
v
fe
где п. k - количества вращающихся и поступательно движущихся масс системы;
ji, GA - момент инерции и мгновенное значение угловой скорости 1-й вращающейся массы;
Т1к, VK, Гц - масса, мгновенное значение скорости и радиус приведения k-й поступательно движущейся массы;
Jnp - приведенный к валу электродвигателя момент инерции системы, который определяют в соответствий с выражением:
00
к
e
з
)пр:$
li cli+zmkVi.c 1
(Осд
(2)
где fflti - среднее за период колебаний значение угловой скорости 1-й вращающейся массы;
VCK - среднее за период колебаний значение скорости k-й поступательно движу- щейся массы;.
Шсд - среднее за период колебаний значение угловой скорости электродвигателя,
Существенным отличительным признаком данного способа регулирования скорости электропривода многомассовой системы является поддержание постоянства количества движения этой системы, соответствующего заданной средней скорости движения. При таком способе регулирования колебания скорости отдельных масс системы, в том числе и электродвигателя, сопровождаются обменом энергии между массами без перекачки ее из сети и обратно. .Из сети потребляется энергия на создание запаса кинетической энергии системы при разгоне, а также энергия для преодолева- ния момента сопротивления, создаваемого силами трения и рабочим органом. После разгона привода из сети потребляется толь- ко энергия для преодоления момента сопро- тивления, а движение системы будет таким, как если бы она была изолирована от внешних воздействий и находилась в состоянии
свободных колебаний.
2
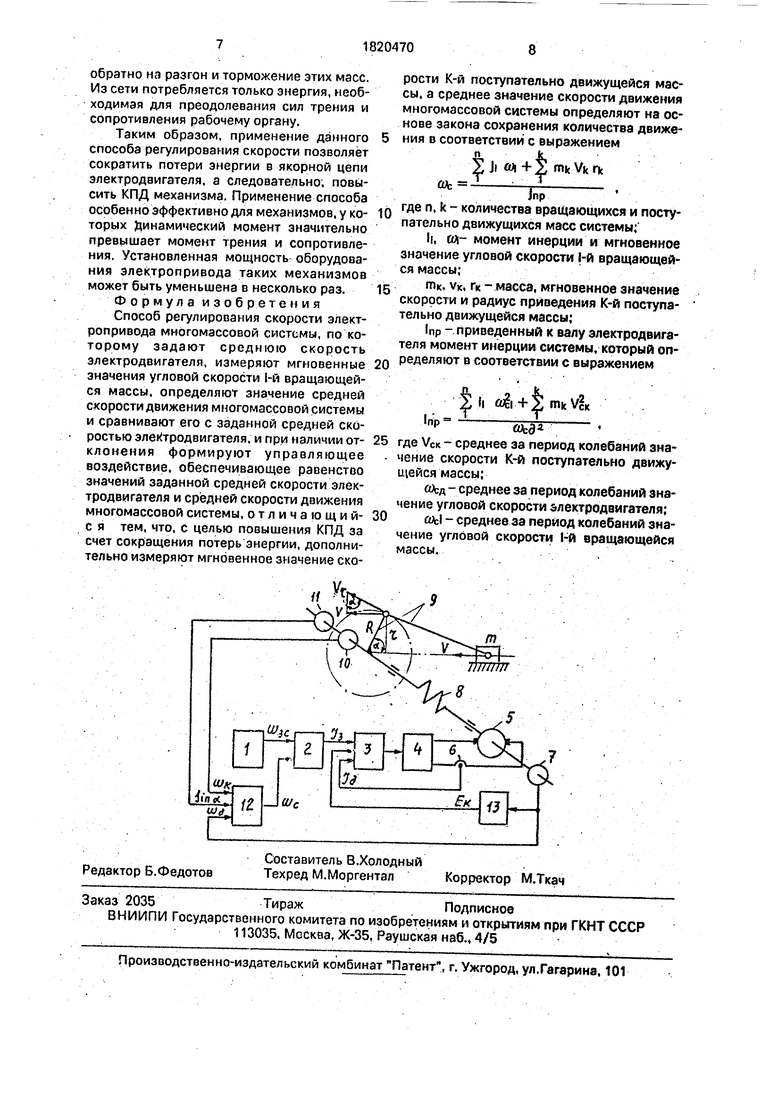
На чертеже приведена функциональная схема устройства для управления электроприводом поршневого компрессора, являющегося примером реализации данного способа регулирования скорости.
Устройство содержит последовательно соединенные задатчик 1 средней скорости, регулятор 2 скорости, регулятор 3 тока, усилитель 4 мощности. К выходу усилителя 4 мощность подключен двигатель 5, в цепь питания которого включен датчик б тока. С одним концом вала двигателя 5 сочленен датчик 7 скорости двигателя, а второй конец вала двигателя соединен с помощью упруго го элемента 8 (длинный вал) с валом криво- шипно-шатунного механизма 9 компрессора, с которым соединены датчик 10 скорости кривошипа и датчик 11 угла поворота кривошипа. Устройство также со- держит блок 12 вычисления средней скорости многомассовой системы и блок 13 компенсации внутренней обратной связи по ЭДС двигателя. Входы блока 12 вычисления средней скорости соединены с выхода- ми датчиков 7, 10, 11, а выход - с вторым входом регулятора 2 скорости. Выход датчика 6 тока соединен с вторым входом регулятора 3 тока, третий вход которого через блок
0
5
0
13 компенсации ЭДС двигателя подключен к выходу датчика 7 скорости двигателя.
Устройство представляет собой двух- контурную систему, построенную по принципу подчиненного регулирования параметров. В контур регулирования тока двигателя входят регулятор 3 тока, усилитель 4 мощности (источник питания), двигатель 5 и датчик 6 тока, В контур регулирования средней скорости многомассовой системы входят регулятор 2 скорости, замкнутый контур тока, датчик 7 скорости двигателя, датчики 10, 11 скорости и угла поворота кривошипа, блок 12 вычисления средней скорости. Задатчик 1 средней скорости представ л лет собой, например, известное устройство, содержащее последовательно соединенные компаратор и интегратор, охваченные отрицательной обратной связью. На его выходе формируется линейно изменяющийся во времени сигнал до заданного уровня с заданной интенсивностью. Регулятор 3 тока может быть выполненным пропорционально-интегральным, а регулятор 2 скорости - пропорциональным. Блок 12 вычисления средней скорости представляет собой арифметическое устройство, с помощью которого вычисляется сигнал обратной связи по скорости в соответствии с выражением (1). Для данного устройства значение средней скорости определяется выражением
35
шд1д +u clk4-m V-r
°ь----П5---
(3)
45
f0 5
где й)д, - угловая скорость и момент инерции двигателя;
У|С,||С - угловая скорость и момент инерции кривошипа;
m, v - масса и линейная скорость поршня;
г - радиус приведения линейного движения поршня к вращательному движению кривошипа;
Inp - момент инерции многомассовой системы, приведенный к валу двигателя, .
Радиус приведения определяется выражением
г- R Sin a
(4)
где R, a - радиус и угол поворота кривошипа.
Линейную скорость поршня можно выразить через угловую скорость кривошипа по формуле
V VrSlna -а RStna(5) где Vr -линейная скорость кривошипа.
Подставляя (4) и (5) в выражение (3), получим
(+ Ј - т
Приведенный к валу двигателя момент инерции многомассовой системы определяется в соответствии с выражением (2), которое для данного устройства имеет вид
пр
, + lk;OJJk-+m Ус аёл
где (йсрг среднее за период колебаний значение угловой скорости двигателя,
ftfck - среднее за период колебаний значение угловой скорости кривошипа.
Vc - среднее значение линейной скорости поршня, определяемое выражением
Vc-S/o (8)
Учитывая, что в данном устройстве йЬд OJtk , а также подставляя (8) в выражение (7), получим
пр
1д-Нк+ -т
Блок 13 компенсации внутренней Обратной связи по ЭДС двигателя предназначен для устранения динамической ошибки при регулировании тока, вызванной изменением ЭДС двигателя. На выходе блока формируется сигнал Ек положительной обратной связи по ЭДС, например, в соответствии с передаточной функцией
где КЕ - коэффициент пропорциональности между ЭДС и угловой скоростью двигателя;
Тит - постоянная интегрирования регулятора тока;
Т - постоянная времени якорной цепи;
Кп - коэффициент усиления усилителя мощности.
В качестве датчиков 7,10 угловой скорости двигателя и кривошипа могут быть применены тахогенераторы, а в качестве датчика 11 угла поворота кривошипа - сельсин.
Устройство работает следующим образом.
При пуске механизма сигнал fibc на выходе задатчика 1 средней скорости увеличивается линейно от нулевого до некоторого заданного значения. Электропривод разго
няется под воздействием регулятора скорости, обеспечивающего равенство заданной оьс и фактической ftfc средних скоростей многомассовой системы. При этом с выхода 5 регулятора скорости на вход регулятора тока подается сигнал задания тока з. При разгоне механизма изменяется угловая скорость и ЭДС двигателя. Однако благодаря действию гибкой положительной связи
10 по ЭДС ток двигателя поддерживается равным заданному и на валу двигателя создается момент, составляющие которого определяются величиной ускорения механизма, силами трения в кинематических
15 звеньях и силами сопротивления рабочему органу. В период разгона механизма потребляемая из сети энергия расходуется на преодоление указанных сил, а также преобразуется в кинетическую энергию движу20 щихся масс. Процесс разгона заканчивается в момент, когда средняя скорость cfc многомассовой системы станет равной заданному значению «зс Если, пренебречь трением и сопротивлением рабочему органу, после
25 разгона потребление энергии из.сети будет отсутствовать. На выходе регулятора скорости сигнал з задания тока будет равным нулю и это нулевое задание будет точно отрабатываться контуром регулирования
30 тока благодаря действию сигнала компенсации внутренней обратной связи по ЭДС. При этом выходное напряжение усилителя мощности будет следить за изменением ЭДС двигателя, пропорциональной его уг35 левой скорости. В этом случае многомассовую систему можно рассматривать как изолированную от внешних возмущений и находящуюся в состоянии свободных колебаний. Такая система в любой момент вре40 мени имеет постоянное значение количества движения, а скорости вращающихся и поступательно движущихся масс изменяются в результате действия внутренних динамических сил, возникающих благо45 даря тому, что массы связаны между собой
через нелинейный (кривошипно-шатунный)
и упругий (длинный вал) элементы. При этом
кинетическая энергия, сохраняя среднее
. значение, периодически изменяется, час50 тично преобразуясь в потенциальную энергию деформации упругих механических звеньев.
С учетом внешних возмущающих воздействий регулирование заданной средней
55 скорости в данном устройстве приводит к тому, что колебания скорости двигателя, кривошипа и поршня сопровождаются только обменом кинетической энергии между массами без перекачки энергии из сети и
обратно на разгон и торможение этих масс. Из сети потребляется только энергия, необходимая для преодолевания сил трения и сопротивления рабочему органу.
Таким образом, применение данного способа регулирования скорости позволяет сократить потери энергии в якорной цепи электродвигателя, а следовательно, повысить КПД механизма. Применение способа особенно эффективно для механизмов, у которых динамический момент значительно превышает момент трения и сопротивления. Установленная мощность оборудования электропривода таких механизмов может быть уменьшена в несколько раз. Формула изобретения Способ регулирования скорости электропривода многомассовой системы, по которому задают среднюю скорость электродвигателя, измеряют мгновенные значения угловой скорости 1-й вращающейся массы, определяют значение средней скорости движения многомассовой системы и сравнивают его с заданной средней скоростью электродвигателя, и при наличии отклонения формируют управляющее воздействие, обеспечивающее равенство значений заданной средней скорости электродвигателя и средней скорости движения многомассовой системы, отличающий- с я тем, что, с целью повышения КПД за счет сокращения потерь энергии, дополнительно измеряют мгновенное значение скорости К-й поступательно движущейся массы, а среднее значение скорости движения многомассовой системы определяют на основе закона сохранения количества движения в соответствии с выражением
|ji
0
5
0
где n, k - количества вращающихся и поступательно движущихся масс системы;
li, щ- момент инерции и мгновенное значение угловой скорости 1-й вращающейся массы;
ftiic, VK, Гк - масса, мгновенное значение скорости и радиус приведения К-й поступательно движущейся массы;
1пр -приведенный к валу электродвигателя момент инерции системы, который определяют в соответствии с выражением
li ой + XmicVi,
СК
1пр
аъд3- где VCK - среднее за период колебаний значение скорости К-й поступательно движущейся массы;
е&д-среднее за период колебаний значение угловой скорости электродвигателя;
ffifcl - среднее за период колебаний значение угловой скорости 1-й вращающейся массы..
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления летучими ножницами с механизмом выравнивая скоростей | 1990 |
|
SU1712077A1 |
| Устройство для управления летучими ножницами с механизмом выравнивания скоростей | 1988 |
|
SU1574383A1 |
| Устройство управления летучими ножницами с механизмом выравнивания скоростей | 1989 |
|
SU1682058A1 |
| Устройство управления летучими ножницами с механизмом выравнивания скоростей | 1990 |
|
SU1712079A2 |
| Цифроаналоговое устройство управления летучими ножницами с механизмом выравнивания скоростей | 1990 |
|
SU1712078A1 |
| Способ идентификации тензора присоединенных моментов инерции тела и устройство для его осуществления | 2018 |
|
RU2688964C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД СУПЕРКАЛАНДРА | 1997 |
|
RU2131641C1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| Способ идентификации присоединенного момента инерции тела и устройство для его осуществления | 2016 |
|
RU2627023C1 |
| Электропривод для подъемной машины с переменными радиусами навивки канатов | 1980 |
|
SU904165A1 |
Использование: в электроприводах циклического действия содержащих упругие, гибкие кинематические связи. Сущность: способ регулирования средней скорости движения многомассовой системы, вычисленной на основе закона сохранения количества движения, позволяет устранить колебания тока электропривода, вызванные колебаниями скорости отдельных частей механизма, обусловленные наличием упругих, гибких и нелинейных связей. 1 ил.
//
шс
т
Е
Ек
fj
| Устройство управления летучими ножницами с механизмом выравнивания скоростей | 1989 |
|
SU1682058A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
