1 Изобретение относится к электро технике, в частности к позиционном электроприводу. Из основного авт.св.№ 1064409 известен позиционный электропривод содержащий электродвигатель, сочле ненный с.подвижной платформой, яко ная обмотка которого соединена с преобразователем, последовательносвязанные задатчик положения, сумм тор, интегратор, усилитель, пьезоэлемент, сочлененный свободным кон цом с исполнительным органом, а другим концом закрепленньш на подвижной платформе, интерферометриче кий датчик положения исполнительно органа, соединенный своим выходом вторым входом сумматора, дифференцирующее звено и нелинейное звено типа зоны нечувствительности, причем выход усилителя через нелинейное звено соедийен с входом преобразователя, а вход лнтерферомет- рического датчика положения исполнительного органа через дифференцирующее звено соединен с входом усилителя ll , Недостатком известного позиционного электропривода является его чувствительность к вибрационным возмущениям положения исполнительного органа со стороны подвижной платформы. Вибрации исполнительного органа могут возникать при включении электродвигателя перемещения платформы, могут вызываться вибрациями подвижной плат формы, связанными с работой постороннего механического оборудования с дрожанием опор и фундамента и т.д Такие возмущения бьшают обычно незн чительными по величине и в грубых позиционных электроприводах могут не учитываться. Однако в известном электроприводе, оснащенном интерфероме рйческим датчиком положения , облад 0ой);им высокой чувствительность вибрационные возмущения могут оказаться йедопустимо большими. В тех случаях когда частоты вибрационных возмущений близки к резонансной час тоте пье оэлемента, в электроприводе может даже возникать режим усиле ния этих вибрационных возмущений. Вибрационйые и направленные перемещения платформы приводят к возникно вению дополнительной динамической погрешюсти позиционирования, ве482личина которой тем больше, чем выше скорость платформы и отношение массы исполнительного органа к массе платформы. Цель изобретения - повышение точности позиционирования. Поставленная цель достигается тем, что в позиционный электропривод дополнительно введены датчик деформации, сочлененный с пьезоэлементом, апериодическое звено и пропорциональное звено, причем выход датчика деформации соединен с входом усилителя, пропорциональное звено включено параллельно интегратору, а задатчик положения соединен с входом сумматора через апериодическое звено. На чертеже приведена схема позиционного электропривода. Позиционньй электропривод содержит электродвигатель 1, сочлененный с подвижной платформой 2, якорная обмотка которого соединена с преобразователем 3, задатчик положения 4, последовательно соединенные сумматор 5, интегратор 6, усилитель 7, нелинейный элемент 8, выход которого соединен с входом преобразователя 3, выход усилителя 7 соединен с пьезоэлементом 9, сочлененным свободным концом с исполнительным органом 10, а другим концом закрепленным на подвижной платформе 2, интерферометрический- датчик положения 11 исполнительного органа 10, соединенный своим выходом с входом сумматора 5. и через дифференцирующее звено 12 - с входом усилителя 7, датчик деформации 13, сочлененньй с пьезоэлементом 9, апериодическое звено .14 и. пропорциональное звено 15, причем выход датчика деформации 13 соединен с входом усилителя 7, про- порциональное звено 15 включено параллельно интегратору 6, а задатчик положения 4 соединен с входом сумматора 5 через апериодическое звено 14. В качестве датчика деформации 13 пьезозлемента 9 могут быть использованы любые известные датчики малых перемещений, емкостные, индукционные, фотодатчики и т.д. От датчика деформации 13 не требуется высокой точности, поскольку она не влияет на статическую точность системы в целом. Электропривод работает следующим образом. Задающий сигнал от задатчика положения 4 через апериодическое звено 14 поступает на вход сумматора 5, где алгебраически суммируется с имею 1ЧИМ обратный знак сигналом обратной связи по положению исполнительного органа 10, поступающим от интерферометрического датчика положения 11; Сигнал рассогласования с выхода сумматора 5 поступает на входы включенных параллельно интегратора 6 и пропорционального звена 15. Сигнал с выхода параллельно включенных интегратора 6 и пропорционального звена 15 поступает на вход усилителя 7, выходное напряжение которого управляет положением пьезоэлемента 9. Пье зоэлемент 9 деформируется и перемещает исполнительный орган 10 на расстояние, пропорциональное изменению напряжения на выходе усилителя 7. Од новременно напряжение с выхода усилите,ля 7 через нелинейный элемент 8 имеющий характеристику типа зоны нечувствительности, поступает на преобразователь 3, выходноенапряжение которого управляет электродвигателем 1, предназначенным для перемещения подвижной платформы.2 вместе с установленным на ней пьезоэлементом 9. Если напряжение, приложенное к пьезоэлементу 9, меньше зоны нечувствительности нелинейного элемента 8, то включения электродвигателя 1 перемещенияподвижной п атформы 2 не происходит. В противном случае, на выходе нелинейного эле1 ента 8 появляется сигнал, поступающий на вход преобразователя 3, управляющего электродвигателем 1 перемещения подвижной платформы 2, которая перемещается вместе с установленным на ней пьезоэлементом 9 и исполнительным органом 10, При этом напряжение на выходе усилителя 7 умень- щается и входит в зону нечувствител ности нелинейного элемента 8, после чего происходит от- ключение электродвигателя 1. Сигнал по положению исполнительного органа 10 с выхода интерферометрического датчика положения I1 поступает через дифференцирующее зве-
но 1,2 на вход усилителя 7. При этом на выходе дифференцирующего звена 12 формируется корректирующий сигнал
Позиционный электропривод при соответствующей настройке нечувствителен к вибрационным возмущениям по скорости перемещения исполнительного органа 10. Соответствующим выбором коэффициентов усиления дифференцирующего звена 12, интегратора 6 и коэффициентов усиления по входам сумматора 5 можно получить любую из известных оптимальных настроек системы. Вибрации подвижной платформы 2 вызывают смещение в пространстве закрепленного на ней конца пьезо- элемента 9 по отношению к его другому концу, на котором закреплен исполнительный орган 10. Относительное смещение концов пьезоэлемента 9 воспринимается датчиком деформа11ЛИ 13, сочлененным с пьезоэлементом 9. Сигнал с выхода датчика деформации 13, пропорциональный деформации пьезоэлемента 9, поступает со знаком плюс на вход усилителя 7. Такое выполнение электропривода позволяет снизить чувствительность его к вибрационным возмущениям положения исполнительного органа 10 со стороны подвижной платформы 2 за счет введения компенсирующей положительной обратной связи по деформации пьезоэлемента 9. I Однако введение одной только компенсирующей положителъной обратной связи по деформации пьезоэлемента 9 снижает запас устойчивости системы. При полной нечувствительности электропривода к вибрационным воз ущениям со стороны подвиж-. ной платформ 1 система становится неустойчивой. Восстановление требуемого запаса устойчивости Осуществляется за счет введения пропорционального звена 15, подключаемого параллельно интегратору 6, и соответствующего выбора коэффициента усиления пропорционального звена 15. Однако пропорциональное звено 15 восстанав- ливая устойчивость электропривода, приводит к некоторой формировке переходных процессов в системе при отработке задания по положению и может ухудщить их качество. Апериодическое звено 14, включенное межДу задатчиком положения 4 и сумматором 5, восстанавливает исходное качество динамических процессов отработки изменений заданного положения испол55 нительного органа 10.
5 . 11648486
со стороны подвижной платформы 2.гана ГО, а такжезначительно лучше
Реакция электропривода на изменениеотрабатываются.возмущения.связанзадания и на изменение нагрузки,ные с вй рация ш интерферометричесприложенной к исполнительному рр-кого датчика положения П.
гану 10, идентична реакции на эти5
воздействия пьезоэлемент а 9, В пред-Таким образом, электропривод
лагаемом электроприводе отсутству-позволяет в несколько раз повысить
ёт дополнительная динамическая ошиб-точность позиционирования в условиях
ка по положению исполнительного ор-вибрации оборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный электропривод | 1982 |
|
SU1064409A1 |
| Позиционный электропривод | 1984 |
|
SU1220096A2 |
| Позиционный электропривод | 1985 |
|
SU1267576A2 |
| Позиционный электропривод | 1986 |
|
SU1403317A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Следящий электропривод | 1990 |
|
SU1764031A1 |
| Задающее устройство | 1978 |
|
SU764078A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
| Двухканальный электропривод | 1987 |
|
SU1473060A1 |
ПОЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД по авт.св. № 1064409, о т л и ч а ю- щ и и с я тем, что, ч, целью повышения точности позиционирования, в него дополнительно введены датчик.деформации, сочлененный с пьезоэлементом, апериодическое звено и пропорциональное звено, причем выход датчика деформации соединен с входом усилителя, пропорциональное звено включено параллельно интегратору, а задатчик положения соединен с входом сумматора через апериодическое звено. 1 (Л CD 4 00 Ntib СХ)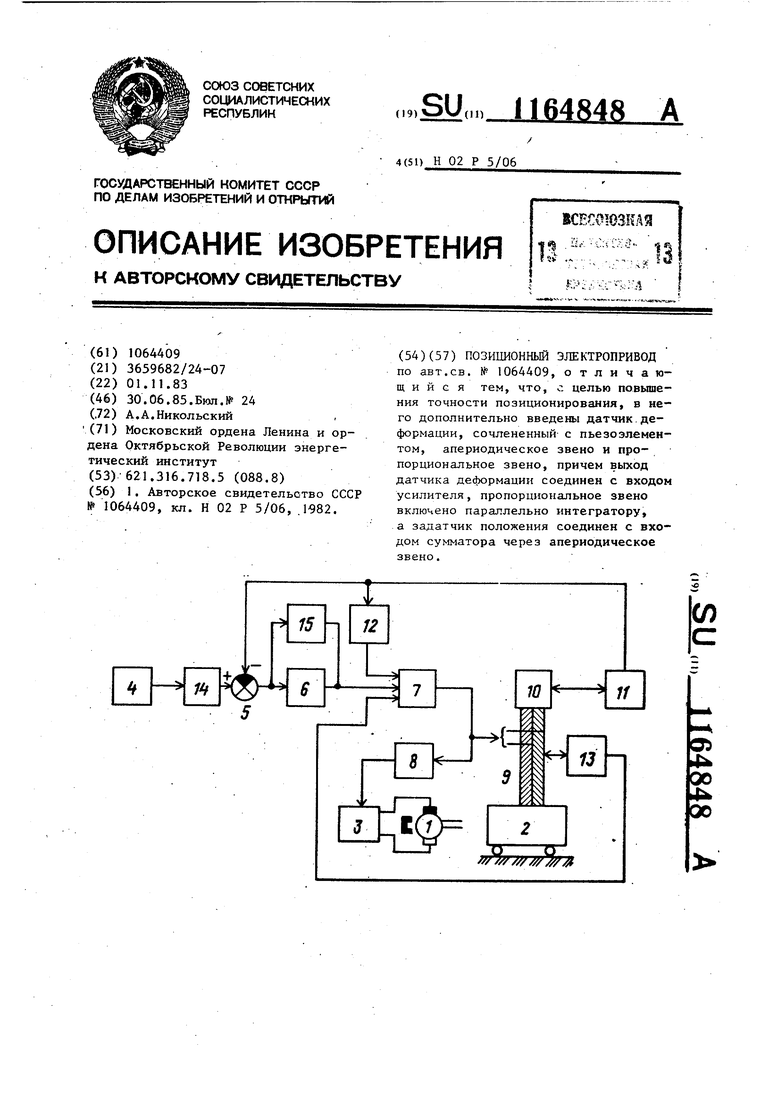
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Позиционный электропривод | 1982 |
|
SU1064409A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
