звено 11 и нелинейное знено (НЗ) 12 типа зона нечувствительности соединены с входом П 3. При отработке больших рассогласований ПЭ 8 не может скомпенсировать сигнал ошибки, управляющий Э 1„ Подача на
1
Изобретение относится к электротехнике, в частности к позиционному электроприводу
Цель изобретения - повышение динамической точности электропривода при отработке больших рассогласований
На чертеже приведена схема электропривода
Позиционный электропривод содер- жит электродвигатель 1, сочлененный с платформой 2, якорная обмотка которого подключена к преобразователю 3, последовательно связанные за- датчик положения 4, сумматор 5, ин- тегратор 6, усилитель 7 и пьезоэле- мент 8, сочлененный свободным концом с исполнительным органом 9, а другим концом закрепленный на Подвижной платформе 2, интерферометрический датчик положения 10 исполнительного органа 9, соединенный своим выходом с вторым входом сумматора 5. Кроме того, электропривод содержит дифференцирующее звено 11 и нелинейно звено 12 типа зона нечувствитель- ти, причем выход усилителя 7 через нелинейное звено 12 соединен с входом преобразователя 3, вькод интер- ферометрического датчика положения 10 через дифференцирующее звено 1 1 соединен с входом усилителя 7, а выход сумматора 5 дополнительно соединен с входом преобразователя 3.,
Электропривод работает следующим образом.
Задающий сигнал от задатчика положения 4 поступает на вход сумматора 5, где алгебраически суммируется с имеющим обратный знак сигналом обратной связи по положению, поступающим от интерферометрическо- го датчика положения 10. Сигнап рассогласования с вьсхода сумматора
дополнительный вход П 3 сигнала с выхода С 5, пропордаонального ошибке позиционирования, который суммируется с сигналом НЗ 12, обеспечивает повышение динамической точности электропривода. 1 ил.
5интегрируется интегратором 6. Интеграл ошибки с выхода интегратора
6поступает на первьй вход усилите ля 7, выходное напряжение которого управляет положением пьезоэлемента 8. Пьезоэлемент 8 деформируется
и перемещает исполнительный орган 9 на расстояние, пропорциональное изменению напряжения на выходе усилителя 7. Одновременно напряжение с выхода усилителя 7 через нелинейное звено 12, имеющее характеристику типа зоны нечувствительности или трехпозиционного релейнего звена, поступает на преобразователь 3, выходное напряжение которого управляет двигателем 1, предназначенным для перемещения платформы 2 вместе с установленным на ней пьезо- элементом 8, Таким образом, если напряжение, приложенное к пьезоэле- менту 8, меньше зоны нечувствительности нелинейного звена 12, то включение двигателя 1, перемещающего платформу 2, не происходит. В противном случае, на выходе нелинейного звена 12 появляется сигнал, поступающий на вход преобразователя 3, управляющего двигателем 1 перемещения платформы 2. Платформа 2 перемещается вместе с установленным на ней пьезоэлементом 8 и исполнительным органом 9. При этом напряжение на выходе усилителя 7 уменьшается и входит в зону нечувствительности
нелинейного звена 12, после чего происходит отключение двигателя 1.
При отработке электроприводом малых рассогласований сигнал ошибки, поступающий с выхода сумматора 5 на ,вход преобразователя 3, быстро уменьшается до нуля и не влияет на работу электродвигателя 1. При отработке больших рассогласований
.происходит насыщение усилителя 7
и пьезоэлемент 8, исчерпав диапазон возможных перемещений, т.е. собственных деформаций, не может скомпенсировать сигнал ошибки, который, поступая с выхода сумматора 5 на вход преобразователя 3, управляет работой двигателя 1.
В данном варианте на дополнительный вход преобразователя 3 подается сигнал с выхода сумматора 5, пропор- циональный ошибке позиционирования, которьй суммируется с сигналом, поступакяцим с нелинейного звена 12, что ведет при больших яеремещениях к увеличению динамической точности электропривода.
Можно показать, что при таком исполнении электропривода он не теряет устойчивости при любой глубине насыщения усилителя 7, если отно- шенйе коэф циентов преобразователя равно
Редактор Н.Гунько Заказ 1329/58
Составитель В.Трофименко
Техред Л.О/гейник Корректор О.Луговая
Тираж 631Подписное
ВНЯИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ПИП Патент, г. Ужгор(1д, ул. Проектная, 4
к
с
де К
4с К, К„ коэффициент усиления усилителя 7j
коэффициент усиления преобразователя 3 по входу, связанному с сумматором 5; коэффициент усиления преобразователя 3 по входу, связанному с нелинейным звеном 12.
Формула изобретения
Позиционный электропривод по авт. св. № 1064409, отличающийся тем, что, с целью повышения динамической точности при отработке больших рассогласований, преобразователь снабжен дополнительным входом, соединенным с выходом сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный электропривод | 1985 |
|
SU1267576A2 |
| Позиционный электропривод | 1983 |
|
SU1164848A2 |
| Позиционный электропривод | 1982 |
|
SU1064409A1 |
| Следящий электропривод | 1990 |
|
SU1764031A1 |
| Позиционный электропривод | 1986 |
|
SU1403317A1 |
| Электромеханический следящий привод постоянного тока | 1989 |
|
SU1640668A1 |
| Электропривод с подчиненным регулированием параметров | 1983 |
|
SU1108593A2 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2288441C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
Изобретение относится к электротехнике, может быть использовано для позиционного электропривода и является дополнительным к авт. св. № 1064409. Цепь изобретения - повышение динамической точности электропривода при отработке больших рассогласований. Позиционный электропривод содержит электродвигатель (Э) 1, сочлененный с платформой 2, преобразователь (П) 3, задатчик положения 4, сумматор (с) 5, интегратор 6, усилитель 7 и пьезоэлемент (ПЭ) 8 с исполнительным органом (ИО) 9. Интер- ферометрический датчик положения 10 ОН 9 соединен с вторым входом С 5. Кроме того, дифференцирующее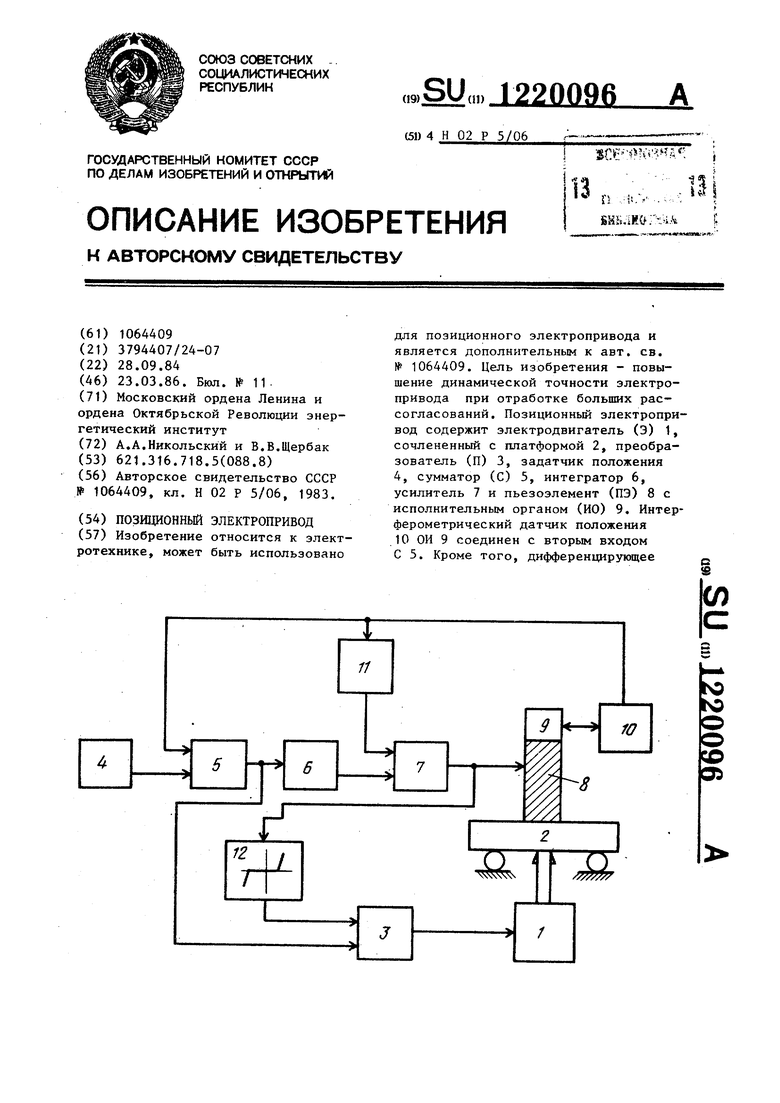
| Позиционный электропривод | 1982 |
|
SU1064409A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
